Os motores de passo são a base de muitos projetos de automação industrial, robótica, mecatrônica e mesmo que envolvem aplicações de eletrônica de consumo. Justifica-se, portanto a procura por este tipo de circuito que pode aparecer com as mais diversas variações dependendo de fatores como o tipo de motor controlado, potência, etc. O circuito que apresentamos se aplica a motores com correntes de até 1 A aproximadamente, alimentação de 12 V e é controlado por circuitos integrados CMOS.
Apresentamos mais uma das muitas configurações possíveis para o controle de um motor de passo utilizando componentes comuns. Com este circuito podem ser controlados motores de até uns 500 mA com os transistores BD135, de até 1 A com transistores TIP31 mas o circuito também aceita Power MOSFETs com a capacidade de trabalhar com correntes ainda maiores.
Na versão básica prevemos a utilização de uma chave para determinar o sentido do passo e uma entrada de pulsos que vai determinar tanto o número de passos como a velocidade se for ligado um oscilador.
COMO FUNCIONA
Dois flip-flops do circuito integrado CMOS 4027 controlam os dois enrolamentos com derivação do motor de modo que funcionando em conjunto a sequência de excitação necessária ao movimento seja obtida.
As duas saídas dos dois flip-flops (Q e Q/) são ligadas às bases de transistores NPN de potência de modo a saturá-los quando se encontrarem no nível alto.
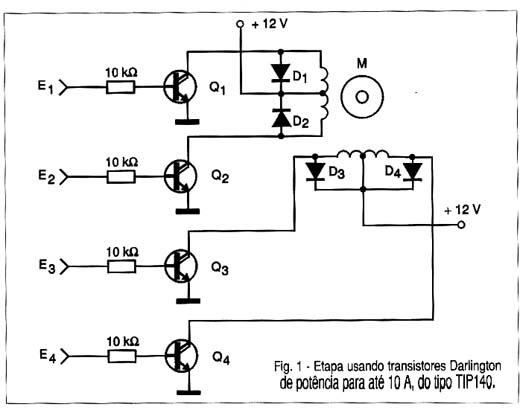
Os transistores devem ter um ganho razoável para permitir a excitação do motor mesmo com as baixas correntes de saída. Sugerimos o uso dos BD135, mas existe a possibilidade de transistores de maior potência serem usados e se forem de baixo ganho pode-se adotar uma etapa Darlington de excitação conforme a mostrada na figura 1 ou mesmo utilizar-se Darlingtons de potência NPN como os TIP140 e outros.
Em paralelo com os enrolamentos dos motores de passo são ligados de diodo para proteger os transistores na comutação, quando devido à carga indutiva pulsos de alta tensão podem ser gerados. Os flip-flops são excitados por uma configuração lógica que tem por base quatro portas Or-Exclusive (OU Exclusivo) CMOS constante do circuito integrado 4070.
A ligação destas portas tanto determina a sequência de excitação dos flip-flops quanto o sentido de rotação do motor quando ele recebe pulsos sequenciais.
O circuito é alimentado com uma tensão de 12 V, mas ele deve funcionar bem com tensões na faixa de 6 a 15 V.
MONTAGEM
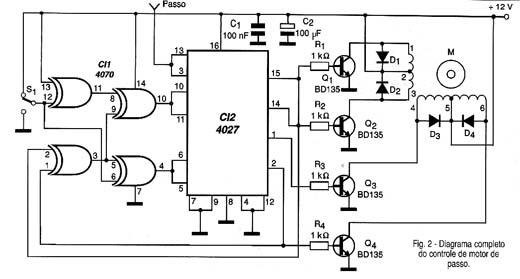
Na figura 2 temos o diagrama completo do controle de motor de passo que eventualmente pode ser utilizado em conjunto com outros circuitos digitais.
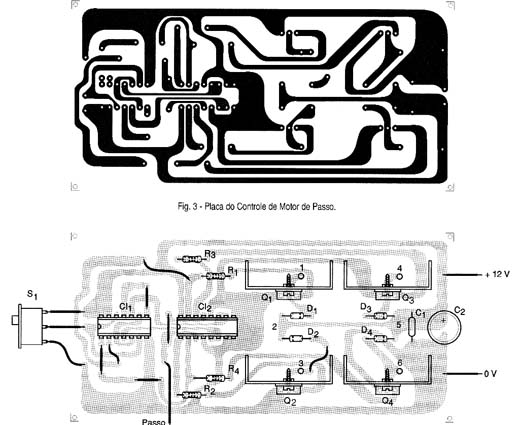
A montagem numa placa de circuito impresso é mostrada na figura 3.
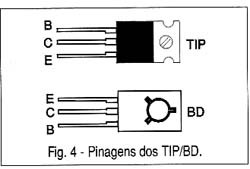
Os transistores de potência devem ser montados em radiadores de calor apropriados, de acordo com a corrente drenada pelo motor. Observamos que a pinagem dos TIP é diferente dos BD conforme mostra a figura 4.
As trilhas para as correntes mais intensas do motor de passo devem ser mais larga. Sugerimos que se deixe pelo menos 1 mm de largura para cada ampere de corrente. Será importante desacoplar a fonte caso ela alimente ao mesmo tempo o motor e as etapas de saída além dos integrados com os capacitores colocados os mais próximos possíveis dos circuitos integrados.
Para o caso de uso de fontes separadas o polo negativo deve ser comum.
A chave S1 pode ser substituída por um sinal lógico de algum circuito externo de controle.
PROVA E USO
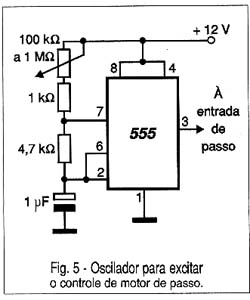
Basta alimentar o circuito e ligar na entrada um oscilador lento ou mesmo uma chave pulsadora. Na figura 5 damos um exemplo de um circuito pulsador que pode ser usado para fazer o motor rodar numa velocidade que depende do ajuste de P1.
A cada pulso aplicado na entrada o motor deve avançar um passo na direção determinada pela posição da chave S1. Comprovado o funcionamento é só utilizar o aparelho na aplicação desejada. Observamos que motores de passo podem ser obtidos com facilidade de diversos tipos de dispositivos como por exemplo impressoras, drives de disquetes, scanners e muitos outros periféricos de computadores fora de uso. Em São Paulo, na região do comércio de eletrônica da Rua Santa Ifigênia existem muitas lojas que vendem motores de passo a baixo custo.
LISTA DE MATERIAL
Semicondutores:
CI-1 - 4070 - 4 portas Ex-Or CMOS
CI-2 - 4027 - 2 flip-flops CMOS
Q1 a Q4 - BD135 ou equivalentes - transistores NPN de média potência - ver texto
D1 a D4 - 1N4002 ou equivalentes - qualquer diodo de uso geral
Resistores: (1/8 W, 5%)
R1 a R4 - 1 k ohms
Capacitores:
C1 - 100 nF - poliéster
C2 - 1000 uF/16 V - eletrolítico
Diversos:
S1 - Chave de 12 pólo x 2 posições
M1 - Motor de passo de 6 fios
Placa de circuito impresso, radiadores de calor para os transistores, fios, solda, oscilador para teste, fonte de alimentação, etc.