No projeto usando microcontroladores, como o Arduino. MSP430, PIC e outros, é necessária a utilização de shields ou interfaces, pois o microcontrolador não faz tudo sozinho. Assim, no acionamento de motores, solenoides, relés e outras cargas, leitura de sensores é necessário contar com estes circuitos externos. No nosso site temos uma infinidade deles, alguns prontos e outros necessitando adaptações conforme o uso. Neste artigo damos uma pequena seleção deles.
Além dos inúmeros projetos de shields com que o leitor pode contar neste site, temos publicações em que eles são abordados. Assim, podemos sugerir o nosso livro da série Banco de Circuitos – volume 30 onde o leitor encontrar 100 projetos de circuitos práticos.
Para este artigo, selecionamos uma boa quantidade de shields simples que podem ser de utilidade para nossos leitores que fazem projetos com microcontroladores.
Dependendo da aplicação e do microcontrolador utilizado, alguns destes shields podem necessitar pequenas alterações de componentes ou de tensões usadas na alimentação.
Driver Para Motor DC
Este circuito pode servir de base para o projeto de pequenos robôs controlados por microcontroladores (shield de potência sem relé). O circuito pode controlar motores até 500 mA e com a troca dos transistores motores de potências maiores.
Os circuito descrito pode ter as etapas lógicas alimentadas por 23,3 ou 5 V e a etapa de potência do motor com tensões maiores a partir de 5 V conforme o motor.
Usando o TIP31 e TIP32 nas etapas de saída os motores podem chegar aos 2 A. Estes transistores devem ser dotados de dissipadores de calor.
Na tabela abaixo temos as condições dos motores em função dos sinais de entrada.
| C1 | C2 | Motor |
| 0 | 0 | Parado |
| 0 | 1 | Sentido Normal |
| 1 | 0 | Sentido Inverso |
| 1 | 1 | Parado |
O diagrama completo do controle é mostrado na figura 1.

Uma placa de circuito impresso para a montagem é sugerida na figura 2.

O capacitor em paralelo com o motor eventualmente deve ser aumentado se for notada instabilidade de funcionamento devido ao ruído das escovas
Interface Simples TTL
Este circuito pode ser usado como uma interface de saída para computadores pessoais que tenham a porta paralela (antigos) e também como shield para microcontroladores com as devidas adaptações. Os componentes usados são comuns.
Este circuito de shield ou interface pode ser usado com diversas finalidades para controlar o fluxo de dados entre um microcontrolador ou computador e um circuito controlado.
A alimentação deve ser feita com tensão de 5 V e as saídas devem levar em conta a capacidade de corrente disponível, acionando eventualmente etapas de potência.
O diagrama completo da interface é dado na figura 3.

A placa de circuito impresso é mostrada na figura 4.

Na montagem devem ser observadas as posições dos circuitos integrados e as trilhas devem ser cuidadosamente verificadas para que não ocorram curtos.
Flip Flop Óptico
Este projeto experimental didático mostra como é possível implementar com optoacopladores um flip-flop óptico. O circuito é compatível com lógica TTL e pode ser usado em aulas ou mesmo projetos que exijam isolamento completo.
A alimentação é feita com uma tensão de 5 V e deve ser ligado em série com os LEDs emissores resistores compatíveis com a aplicação.
Para usar como um shield microcontrolado o resistor em série com o LED pode ser de 220 Ω para lógica de 3,3 V e 330 Ω para lógica de 5 V.
Acopladores ópticos equivalentes podem ser utilizados.
Na figura 5 temos o diagrama completo do flip-flop.

Na figura 6 temos uma sugestão de placa de circuito impresso para a montagem.

Ponte H com MOSFET de Potência
O circuito apresentado na figura 7 possibilita o controle de motores de corrente contínua de vários ampères a partir de sinais lógicos CMOS.

Duas das portas de um circuito integrado 4011 são usadas como inversores. Elas são ligadas de tal forma que, quando uma se encontra com a saída no nível alto a outra, obrigatoriamente se encontra com a saída no nível baixo.
Dessa forma, os transistores de efeito de campo de potência que formam a ponte H conduzem dois a dois estabelecendo sentidos diferentes de circulação da corrente através do motor. Com o nível alto na entrada o motor gira num sentido e com o nível baixo no sentido oposto.
A corrente máxima do motor controlado depende apenas dos transistores escolhidos.
A alimentação pode ser feita com tensões diferentes de 12 V, conforme o motor empregado. Com tensões abaixo de 9 V, a resistência entre o dreno e a fonte dos transistores começa a se tornar sensível nas perdas para o motor.
Eventualmente pode ser necessário ligar em paralelo com o motor um capacitor de 1 a 10 µF (despolarizado) para se evitar instabilidades causadas pela comutação de suas escovas.
Na figura 8 temos uma sugestão de placa de circuito impresso para esta montagem.

Observe que, dependendo da intensidade da corrente exigida pelo motor, os transistores devem ser dotados de radiadores de calor apropriados.
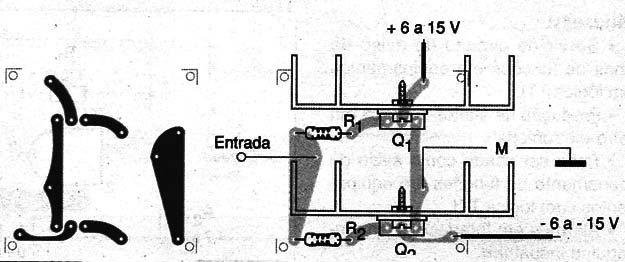
Shield de Controle Bidirecional de Motor DC
O circuito mostrado na figura 9 é uma "meia ponte H" e sua finalidade é controlar o sentido de rotação de um motor de corrente contínua a partir da polaridade do sinal de entrada.
Com um sinal positivo o motor gira no sentido direto. Com um sinal negativo no sentido inverso. Sem sinal ou com uma tensão de 0 V o motor estará parado.
Motores de até 2 A com tensões na faixa de 6 a 15 V de alimentação podem ser controlados por este circuito.

Utilidades:
Controle lógico de motores em automatismos e projetos de mecatrônica a partir de sensores ligados à comparadores de tensão.
Interfaceamento de motores com computadores usando circuito intermediário apropriado.
Inversão do sentido de circulação em automatismos de corrente contínua como, por exemplo, solenoides.
Controle de sentido de movimento em robôs e outros dispositivos móveis usando chaves como sensores.
Implementação de controles PWM aplicando pulsos de frequência e polaridade apropriada, conforme sentido e velocidade desejada para os motores.
Detalhes Construtivos:
Os transistores de potência admitem equivalentes conforme a corrente do motor ou outra carga controlada. Esses transistores devem ser dotados de dissipadores de calor.
O circuito precisa de uma corrente de entrada de pelo menos 5 mA para acionamento de um motor de 500 mA com transistores de ganho 100.
Isso significa uma tensão da ordem de pelo menos 5 V na entrada, com polaridade que dependerá do sentido de rotação desejado.
Ganhos maiores podem ser obtidos com transistores Darlington de potência.
Na figura 10 temos uma sugestão de placa de circuito impresso, se bem que a configuração possa ser implementada na própria placa que contém o circuito completo de controle.
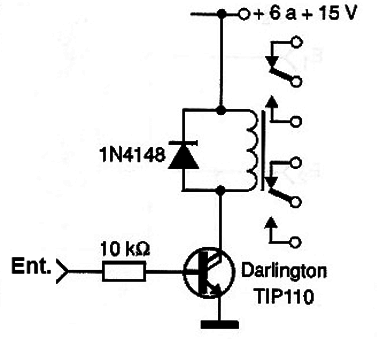
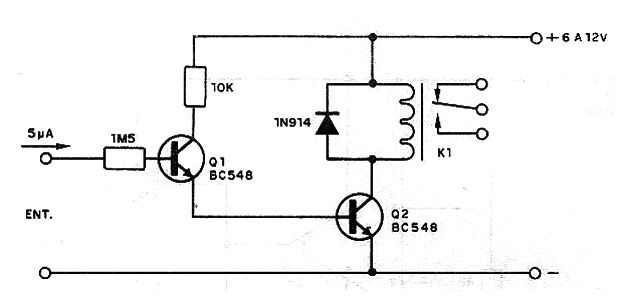
Shield Para Acionamento de Relé ou Solenoide
As placas de Arduino possuem capacidade limitada de corrente. Se bem que cada saída possa fornecer uma boa corrente, se acionarmos muitos relés ou cargas, no conjunto a fonte usada pode sofrer e mesmo haver problemas de aquecimento do microcontrolador.
Outro problema está no fato de não dispormos de um relé de 5 V ou 3,3 V e desejarmos usar um relé de maior tensão. Uma possibilidade para se economizar energia do microcontrolador consiste em se usar Shields separados para relés que podem ter alimentações separadas até 12 V. Este circuito mostra como isso é possível.
Com o circuito da figura 11 é possível acionar relés de 20 mA a 100 mA de corrente de bobina com tensões de 6 a 12 V, aplicando uma corrente de entrada de apenas 5 µA.
O circuito pode também acionar cargas maiores com a troca de Q2 por um BD135 caso em que a corrente máxima pode chegar a 500 mA com o acionamento de solenoides e motores diretamente. O circuito pode ser alimentado por tensões de 6 a 12 V conforme a carga alimentada.
Eventualmente o resistor de 1M5 deve ser reduzido se for constatado ganho insuficiente do circuito.
Shield Para Acionamento de Relé no Controle de Motores II
O que diferencia este circuito do anterior é a necessidade de uma corrente muito menor para acionamento e apenas um transistor.
O relé pode ser de 5 ou 12 V conforme a alimentação e a a fonte tanto para o motor como para este circuito deve ser separada do microcontrolador. Com isso evita-se o problema de interferências das escovas do motor.