Este artigo é parte do meu livro Mechatronics, Robotics and Artificial Intelligence (*). Aqui eu forneço várias sugestões sobre o uso de diodos em controles de movimento, também com base em artigos que publiquei em outras mídias, como revistas em muitos países.
MEC117E MEC197S
Ao energizar um motor de corrente contínua de uma fonte de energia CA (por exemplo, o secundário de um transformador de baixa tensão), é necessário adicionar um retificador ao circuito. O diagrama de blocos completo de um retificador de meia onda com filtro é mostrado na Figura 1.
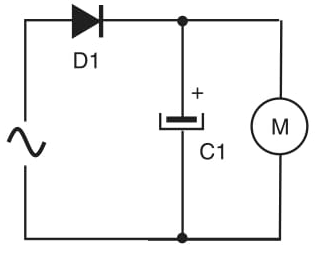
O diodo conduz somente a metade dos semiciclos da tensão da linha de energia CA. O capacitor filtra (suaviza) os pulsos de tensão, mantendo o nível de tensão aplicado no motor o mais constante possível. O valor do capacitor depende da corrente drenada pelo motor nessas aplicações. Uma regra simples para motores alimentados de 3 a 15 V é adotar 1.000 µF de capacitância para cada ampere de corrente. Por exemplo, use um 470 ?F (500 ?F) para um motor de 500 mA. Usando este circuito, você pode alimentar seu aplicativo a partir de fontes AC como pequenos transformadores.
Controle de Onda Completa
O circuito mostrado na figura 1usa apenas metade dos semiciclos da tensão alternada. Se você não pretende usar os outros semiciclos em outra parte do circuito (para controlar outro motor, por exemplo), seria melhor usar a configuração mostrada na Figura 2.

O capacitor de filtro é escolhido da mesma maneira descrita no controle de meia onda. Este circuito também pode ser usado em circuitos CC para manter a direção de um motor independente da polaridade da fonte de tensão, conforme mostrado na Figura 1.