Os controles de potência PWM (Pulse Width Modulation) são altamente indicados para aplicações em Robótica, Mecatrônica e até Modelismo pela possibilidade de se manter o torque de motores DC mesmo em baixas velocidades. O circuito apresentado tem características que permitem o controle de motores a partir de 6 V (com correntes de até 5 A) utilizando componentes comuns em nosso mercado.
Nos controles PWM o que se faz é variar a largura do pulso de uma tensão retangular aplicada à carga de modo obter-se um controle sobre a potência média aplicada.
Este tipo de controle tem a vantagem de operar como uma "fonte chaveada" com altíssimo rendimento, já que o elemento de controle, por operar com sinais retangulares, não dissipa grande potência.
Utilizando FETs de potência de alta capacidade de corrente de controle, podemos ter um excelente rendimento para este tipo, desde que a tensão de alimentação não seja muito baixa.
Observamos que para os FETs de potência as características de Rds (resistência entre dreno e fonte em plena condução) só são válidas para tensões de excitação e alimentação relativamente altas (acima de 9 V para os tipos comuns). Abaixo destes valores, os FETs de potência comportam-se como os transistores bipolares equivalentes.
No nosso caso, o controle PWM é indicado tanto para motores de corrente contínua como também para outras aplicações tais como dimmers, controles de temperatura ou ainda no acionamento de eletro-imãs.
COMO FUNCIONA
Para gerar os sinais retangulares com ciclo ativo ajustável externamente (entre perto de zero e 100%) utilizamos um oscilador com base no conhecido circuito integrado 555.
Na configuração normal, o 555 gera sinais retangulares cujo tempo de condução depende de Ra e Rb de acordo com as fórmulas dadas na figura 1 em que temos o circuito típico.
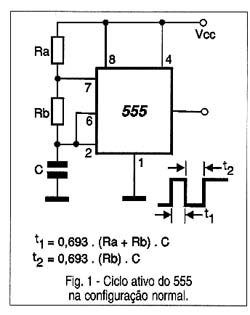
Conforme podemos ver, o ciclo ativo nesta configuração nunca pode ser menor do 50%, pois ele depende da soma dos valores de Ra e Rb que estão em série.
De modo a superar este problema fazendo o 555 operar com ciclo ativos numa faixa muito mais ampla como a exigida para esta aplicação, usamos a configuração básica ilustrada na figura 2.
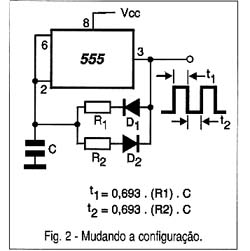
Conforme veremos no diagrama completo, o potenciômetro oferece percursos diferentes para a corrente de carga e descarga do capacitor que, justamente, determinam o tempo em que a saída se mantém no nível alto e no nível baixo.
Assim, ajustando o potenciômetro, dividindo as correntes de carga e descarga pelos diodos D1 e D2 podemos controlar o ciclo ativo do oscilador numa faixa muito mais alta.
Na prática, esta faixa parte de perto de zero e vai até quase 100%. Apenas precisamos incluir R3 de 1 k?, pois este é o valor mínimo de resistência que pode aparecer neste circuito, representando menos de 1% do valor do ciclo ativo obtido.
Os sinais conseguidos na saída do circuito integrado 555 são aplicados diretamente à comporta de um transistor de efeito de campo de potência, que é o elemento principal de controle da corrente do motor.
Transistores de efeito de campo de potência comuns, que são amplamente usados em fontes chaveadas e em muitos eletroeletrônicos, podem controlar correntes na faixa de 2 a 100 ampères.
Este componente ao conduzir apresenta uma resistência entre o dreno e a fonte que determina quanto de calor ele gera no processo.
Os FETs de potência costumam ter esta Rds muito baixa, mas este valor ainda é significativo quando o circuito opera com tensões baixas (abaixo de 10 V). Assim, mesmo podendo controlar correntes muito elevadas nesta aplicações, temos a produção de uma certa quantidade de calor que exige o uso de dissipadores neste componente.
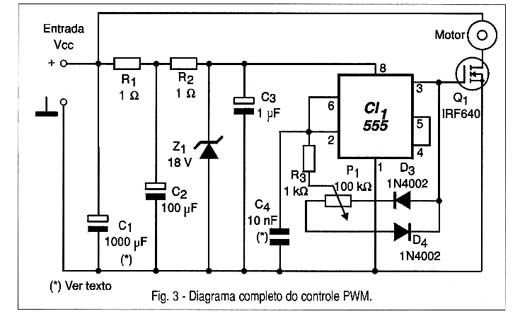
A finalidade do diodo zener na alimentação do circuito integrado é evitar que os transientes gerados pela comutação do motor possam realimentar o circuito, afetando o funcionamento do oscilador e até mesmo colocando em risco a integridade do circuito integrado. O circuito pode funcionar com tensões de entrada de 6 a 25 V.
MONTAGEM
Na figura 3 temos o diagrama completo do controle PWM.
A montagem do controle pode ser feita de forma modular facilitando assim seu uso, conforme mostra a placa da figura 4.
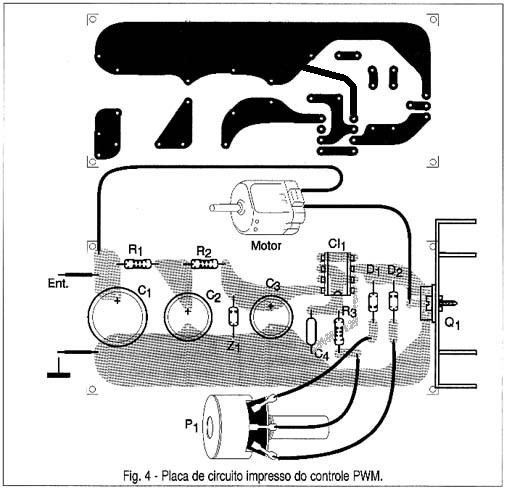
Os capacitores eletrolíticos devem ter tensões de trabalho pelo menos uns 50% maiores que as tensões usadas na alimentação do módulo.
O diodo Z1 pode ser de 18 V para tensões de entrada até 15 V, e de 28 V a 30 V para tensões de entrada maiores.
Os cabos de alimentação do circuito e para o motor devem ter espessura de acordo com a corrente a ser controlada.
O transistor de efeito de campo pode ser qualquer tipo de potência com corrente de acordo com o motor que vai ser controlado. Os tipos da série IRF como o IRF720, IRF620, IRF640 são ideais para aplicações em que motores de correntes até uns 2 ou 3 ampères são usados.
PROVA E USO
Para a prova de funcionamento tanto pode ser colocado um pequeno motor de corrente contínua, não importando a sua corrente, quanto uma lâmpada. Basta então ligar na entrada do controle a tensão nominal do motor e verificar a atuação do controle dentro da faixa esperada.
Eventualmente C4 pode ser alterado na faixa de 10 a 100 nF de modo a obter-se um controle mais estável do motor, sem vibrações.
Para lâmpadas incandescentes ou aquecedores, este capacitor também poderá ser alterado.
A comprovação da alteração do ciclo ativo poderá ser verificada também com o uso de um osciloscópio ligado no pino 3 do circuito integrado.
LISTA DE MATERIAL
Semicondutores:
CI-1 - 555 - circuito integrado, timer
Z1 - 18 V x 1 W - diodo zener
D2, D3 - 1N4004 - diodos retificadores de silício
Q1 - FET de potência - ver texto - IRF640, etc.
Resistores: (1/8W, 5%)
R1, R2 - 1?
R3 - 1 k?
P1 - 100 k? - potenciômetro
Capacitores:
C1 - 1000 ?F - eletrolítico
C2 - 100 ?F - eletrolítico
C3 - 1 ?F/25 V - eletrolítico
C4 - 10 nF - cerâmico ou poliéster
Diversos:
Placa de circuito impresso, radiador de calor, fios, botão para o potenciômetro, solda, etc.