










Este artigo foi escrito com base no meu livro Robótica, Mecatrônica e Inteligência Artificial - Robotics, Mechatronics and Artificial Intelligence (esgotado) publicado nos Estados Unidos. Os circuitos integrados sugeridos são da época (2002) com tipos mais modernos. Visite a Mouser Electronics (www.mouser.com) para opções mais modernas.
Os circuitos mostrados nos artigos anteriores desta seção usavam componentes discretos (isto é, transistores, resistores, diodos e outros componentes). Isso pode ser considerado uma solução importante em trabalhos didáticos. Mas não é a única solução para projetos nessa área. O projetista moderno de circuitos de robótica e mecatrônica pode encontrar muitas pontes H na forma de CIs. Muitos fabricantes, em sua linha de CIs, oferecem
Circuitos de ponte H que podem controlar motores de alta potência e podem ser usados sem (ou alguns) componentes externos adicionais.
Duas das pontes IC H mais populares estão listadas abaixo e depois oferecemos alguns blocos de aplicativos.
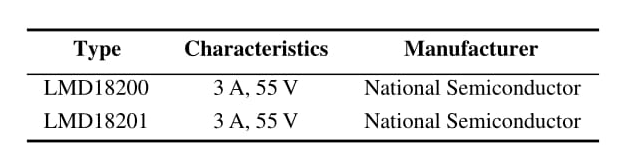
Os mecanismos de pesquisa da Internet podem ajudar o leitor a encontrar mais informações sobre esses e outros ICs.
Informação adicional
Os transistores a serem usados em uma maia ponte ou completa dependem da corrente que eles devem controlar. Essa corrente é determinada pelo motor e pode variar de poucos miliamperes a mais de 2 A. Nas tabelas a seguir, apresentamos ao leitor algum transistor adequado para aplicações em pontes.

A figura 2 mostra um circuito usando o LM18201. O circuito Thos utiliza duas tensões de alimentação, uma para o estágio de potência (até 55 V) e outra para o controle lógico (5 V).
Este controle pode ser feito de TTL ou microcontroladores como o Arduino ou o PIC.

