










Neste artigo o leitor acompanhará a montagem de um robô didático utilizando os kits alemães Fishertechnik que, além de proporcionarem muitas horas de lazer, podem ser muito úteis no ensino de robótica industrial.
Nota: Este artigo é de 2005
Para a montagem do robô do tipo braço articulado usamos dois kits da Fishertechnik: o "Industry Robots" e o "Computing Starter Pack"(figura 1). O primeiro possui várias peças que possibilitam a montagem de vários tipos de robôs, enquanto o segundo, além de permitir algumas montagens, vem com a unidade de controle eletrônica e o software de programação visual LLWin para PC.

Comparando o robô didático de nossa montagem com um robô industrial (figura 2), verificamos que ambos têm várias partes em comum, entre elas o manipulador, servomotores, encoders, fusos, guias e sistema eletrônico de controle.

O robô didático que montamos tem 4 motores (figura 3) que viabilizam os seguintes movimentos:
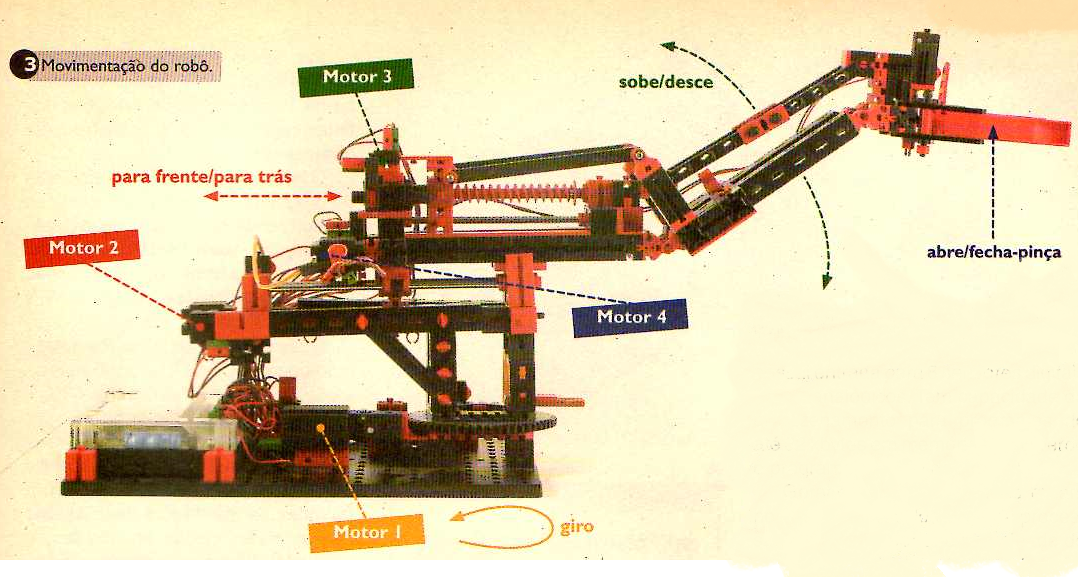
Motor 1 (rotação da base) - Propicia que todo o conjunto do braço rotacione em até 270 graus. O movimento é obtido através de um sistema de coroa e pinhão (rosca sem fim).
Motor 2 (deslocamento do braço no raio de atuação) - Através de um fuso e de guias paralelas, o motor desloca todo o braço em função do raio, ou seja, faz com que a pinça fique mais longe ou mais perto do centro da base.
Motor 3 (levanta e abaixa a pinça) - Por meio de um sistema de fuso e de alavancas, faz com que a pinça seja levantada ou abaixada.
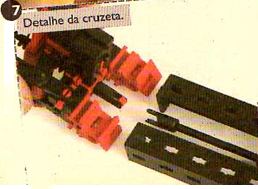
Motor 4 (abre e fecha a pinça) - Com um sistema de fuso e alavancas i aciona a pinça para fechar ou abrir. O destaque está no movimento do fuso, que é feito através de um sistema de cardam e cruzeta.
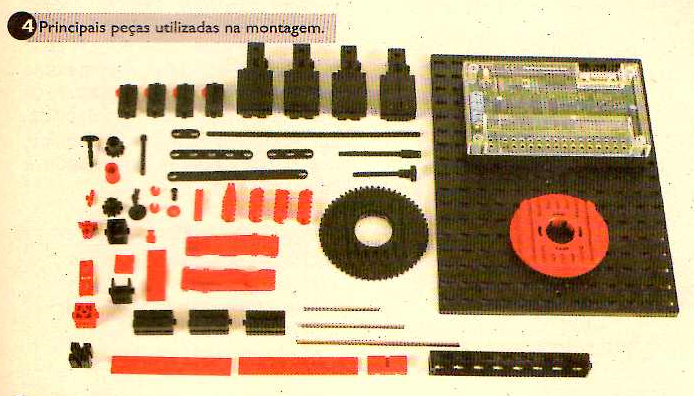
Assim como na montagem da escavadeira pneumática (MF n° 20), meus filhos ficaram muito ansiosos para montar o robô. Necessitamos de aproximadamente 4 horas para fazer a montagem mecânica. Apesar da montagem ser complexa, a experiência que eles obtiveram na montagem da escavadeira pneumática ajudou bastante, principalmente na separação das peças (figura 4) e interpretação dos desenhos no manual de montagem.
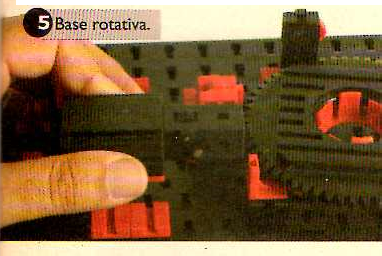
Começamos montando a base rotativa (figura 5), colocamos o fuso e as guias para o deslocamento radial do braço (figura 6). Na parte superior colocamos o acionamento (cardam e cruzetas) para movimentar a pinça (figura 7).

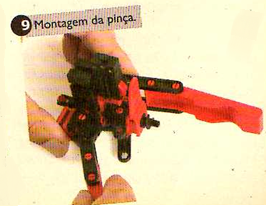
Na sequência, montamos o fuso e as alavancas para o movimento de subir e descer da pinça (figura 8). Separadamente, montamos a pinça (figura 9). Finalizamos a montagem mecânica colocando a pinça no braço e o mesmo no conjunto da base.

Note que para todos os motores instalados temos um encoder correspondente e uma chave de fim-de-curso, com isso, o sistema eletrônico • pode posicionar exatamente a pinça em seus diversos movimentos. A figura 10 microcontrolado com interface serial RS-232 para conexão ao PC. Ela pode controlar 4 motores, mostra em- detalhes um encoder que é composto de uma chave de tipo fim de curso e um eixo de carne.

A unidade de controle (figura 11), é um sistema microcontrolado com interface serial RS-232 par conexão ao PC. Ela pode controlar 4 motores, possui entrada para 8 sensores digitais e dois analógicos. Tem capacidade de armazenamento para programas de até 32 kbytes em memória RAM (perde o programa quando desligado).
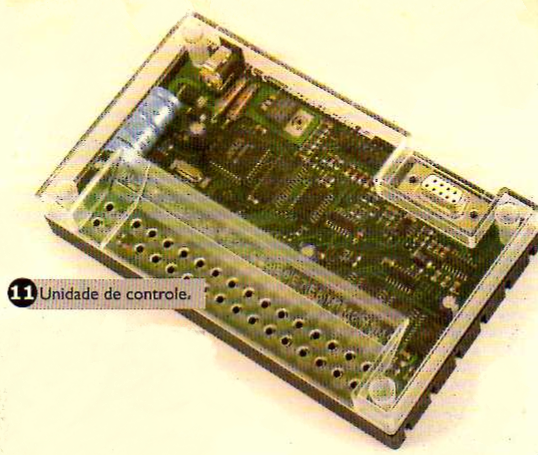
Geralmente, os programas rodam no PC devido a velocidade de processamento ser maior que na unidade de controle, principalmente quando estamos utilizando encoders.
Junto com o kit "Computing Starter Pack" acompanha um CD do LLWin para ser instalado em um PC com sistema operacional Windows 95 ou superior. Fizemos a instalação em um PC Pentium III 850MHz com Windows 2000 sem maiores dificuldades, e o mais interessante é que o software tem a opção da língua portuguesa.

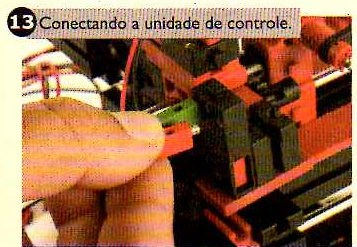
Para a montagem da unidade de controle e suas conexões (figuras 12 e 13), foram necessárias mais duas horas de trabalho entre cortar os fios, parafusar nos plugues e posicioná-los corretamente. Com isso feito, passamos aos testes iniciais utilizando o programa "Diagnose de Interface" (figura 14), onde pudemos acionar os motores e verificar o funcionamento dos sensores. Identificamos que a chave de fim-de-curso do motor 3 não estava corretamente posicionada.
E com esse programa de diagnóstico, meus filhos ficaram divertindo-se com o robô, pegando e soltando objetos.

O próximo passo que cumprimos foi estudar o programa LLWin para entender seu funcionamento. Utilizamos o manual (em Português) que explica cada função e comando passo-a-passo. Fazer novos programas e entender os programas exemplos também é fácil devido ao tipo de programação visual. A figura 15 ilustra o programa para acionar o motor M1 até que a chave de fim-de-curso (sensor El) seja acionada.
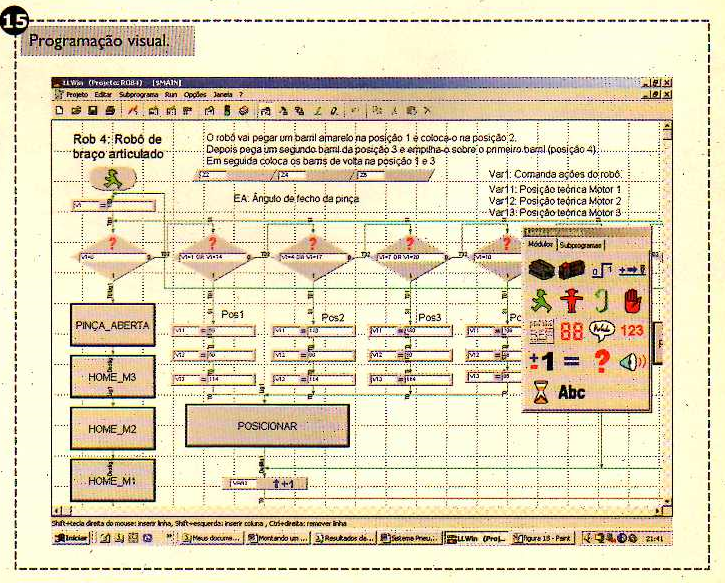
Por último rodamos o programa exemplo ROB4.MDL, que manipula 3 barris, colocando-os em posições distintas, repetindo esse processo sucessivamente.
O leitor que quiser testar o ambiente de programação pode fazer download de uma versão de demonstração disponível no link: www.fischertechnik.de/english/index.html. Utilize a opção. Computing, software e escolha LLWIN 3.0D.
Novamente, o que mais me chamou a atenção no sistema de montagem da Fishertechnik, foi a robustez da montagem final. Apesar das inúmeras peças encaixadas, o robô não desmonta nem em operações de colisão. Realmente é. um kit de qualidade que pode ser utilizado em ambiente educativo sem maiores problemas assim como diverte muito os jovens, desenvolvendo suas habilidades motoras e trabalho em equipe, além de despertar a criatividade e imaginação.
