Em mecatrônica, e outras aplicações que envolvem também o controle de potência, entretanto, um existem casos em que o controle de velocidade de motores ou da intensidade da corrente numa carga como um solenoide ou mesmo uma lâmpada é necessário. Existem duas tecnologias básicas para se obter o controle da potência aplicada a uma carga: linear e PWM. Neste artigo vamos justamente analisar o princípio de funcionamento dos controles lineares de potência. No artigo “Controles PWM” deste site, o leitor terá explicações sobre o segundo método de controle.
Os motores de corrente contínua são dispositivos cuja potência depende da tensão que lhes é aplicada e também da intensidade da corrente que circula através deles. Quando carregamos um motor, sua velocidade diminui e com isso a intensidade da corrente aumenta, elevando-se assim a potência que ele consome conforme mostra a curva característica da figura 1.
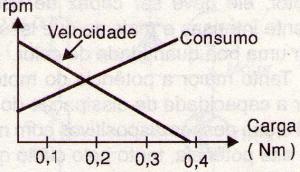
Figura 1 – Quando o motor faz mais força, a corrente aumenta (consumo) e a velocidade diminui.
Por outro lado, sob carga constante, a potência consumida aumenta com a tensão de um modo mais ou menos linear, juntamente com a corrente e a sua velocidade de rotação, conforme mostra o gráfico da figura 2.
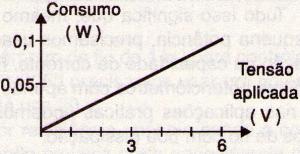
Figura 2 – Consumo e tensão são proporcionais, conforme mostra a curva desta figura.
Isso significa que a maneira mais simples de se controlar a velocidade de um motor de corrente contínua é modificando a corrente que passa através dele, o que pode ser feito com a ajuda de algum tipo de dispositivo externo. Este tipo de controle em que variamos linearmente a corrente aplicada numa carga ou a tensão aplicada é denominado "controle linear" de potência. Existem diversas técnicas para se obter esse controle, utilizando-se desde simples componentes, até configurações baseadas em modernos semicondutores.
O Reostato
A forma mais simples de se controlar a intensidade de uma corrente num motor de corrente contínua é obtida através de um reostato, conforme mostra a figura 3.
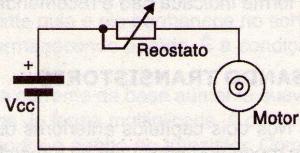
Figura 3 – Controle linear simples utilizando um reostato.
Um reostato nada mais é do que um resistor variável ou ajustável ligado em série com o motor. Quando o reostato está na sua posição de mínima resistência ou zero, passa livremente e sua intensidade através do motor é máxima. Quando aumentamos a resistência do reostato, ele forma com o motor um divisor de tensão. Quando sua resistência aumenta, diminui a tensão aplicada ao motor é menor e com isso também a corrente. Com a diminuição da corrente no motor, diminui velocidade, conforme mostra a figura 4.
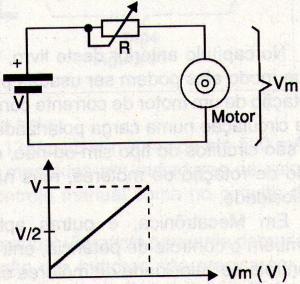
Figura 4 – O reostato no controle de um motor e sua curva de atuação.
Os reostatos, entretanto, tem uma séria limitação de uso: como a corrente que passa através dele é a corrente do motor, eles devem ser capazes de controlar correntes relativamente intensas e mais do que isso: devem ser capazes de dissipar uma boa quantidade de calor.
Tanto maior a potência do motor controlado, maior deve ser a capacidade de dissipação do reostato. Isso torna inviável o uso desses dispositivos com motores (ou outras cargas) de alta potência, tanto pelo custo como pelo tamanho. Assim, conforme mostra a figura 5, na condição em que o reostato está na posição em que a tensão aplicada ao motor é metade da tensão de alimentação, ele dissipa tanta potência quanto o próprio motor!
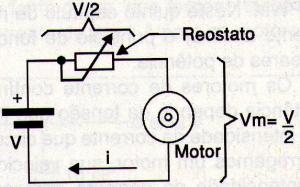
Figura 5 – A tensão se divide entre o reostato e o motor, o que é causa de grandes perdas em forma de calor.
Tudo isso significa que, mesmo controlando motores de pequena potência, precisamos usar reostatos de boa dissipação ou capacidade de corrente. Reostatos nada mais são do que potenciômetros com apenas dois terminais usados e nas aplicações práticas podemos usar potenciômetros de fio com boa dissipação. Assim, na figura 6 mostramos como é possível usar um potenciômetro de fio de 50 ohms x 5 W para controlar um pequeno motor de corrente contínua que não exija mais do que uns 100 mA.
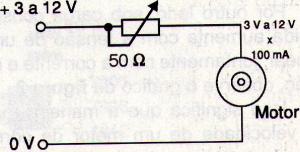
Figura 6 – Circuito prático para um motor de baixo consumo.
Para potências maiores, o uso do reostato da forma indicada não é recomendável.
Usando Transistores
Sabemos que podemos usar os transistores como chaves e com isso controlar correntes intensas a partir de sinais fracos. A primeira aplicação importante do transistor como chave pode ser vista quando analisamos as pontes H. No entanto, os transistores também podem funcionar de uma outra forma, amplificando a corrente, ou seja, controlando sua intensidade através de uma carga que é justamente algo que nos interessa neste instante. Ao analisar o princípio de funcionamento de um transistor, vemos que ele pode operar de uma forma linear, amplificando correntes, ou seja, funcionando como um resistor variável. Lembrando através da figura 7, a curva característica de um transistor tem duas regiões importantes: uma em que ele opera como chave e outra que ele opera como amplificador, ou seja, no modo linear.
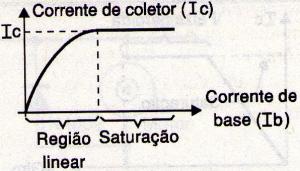
Figura 7 – Curva característica de um transistor ressaltando a região de operação linear.
Se trabalharmos com um transistor no setor linear de sua curva característica podemos controlar com precisão a corrente que passa através dele e de uma carga ligada em série, tudo isso a partir de uma corrente muito menor que aplicamos à sua base, conforme mostra a figura 8.
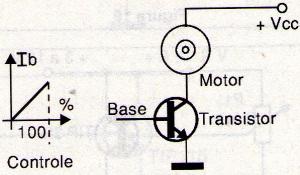
Figura 8 – Usando um transistor para controlar a corrente num motor.
Como um transistor de potência pode controlar correntes intensas, podemos usar uma corrente muito menor para controlar correntes maiores. Essa corrente de controle pode ser suficientemente baixa para que um potenciômetro comum suporte sem problemas. Levando isso à prática podemos ter um controle de velocidade para um motor de corrente contínua ou outra carga qualquer com facilidade, usando um potenciômetro de baixa potência e um transistor para fazer o “trabalho pesado”. Chegamos então a um primeiro tipo de controle linear de potência que é mostrado na figura 9. Esse circuito faz uso de um transistor NPN de potência que pode ser o BD135 para cargas de até 500 mA, o TIP31 para cargas de até uns 2 A e o 2N3055 para cargas de até 4 ampères.
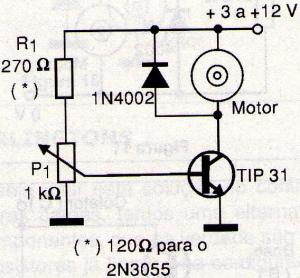
Figura 9 – Circuito completo de um controle de motor para correntes até uns 4 A.
Para os transistores BD135 e TIP31 podemos usar um potenciômetro de fio de 1 k ohms para controlar a velocidade de um motor com tensões de até uns 12 V. Para o 2N3055 precisamos usar um potenciômetro de fio de 470 ohms para controlar cargas com tensões de até uns 20 V. Usamos potenciômetros de fio, pois em condições de menor resistência, mesmo sendo a corrente de base menos intensa do que a exigida pelo motor ela ainda provoca certo aquecimento do componente. Um potenciômetro de carbono (grafite) poderia aquecer demais num circuito como o indicado. Veja que em todos os casos, os transistores deverão estar montados em bons radiadores de calor.
O funcionamento deste controle é simples de entender: quando o cursor do potenciômetro está do lado do emissor do transistor, a corrente em sua base é praticamente nula e ele permanece no corte, ou seja, não conduz a corrente. O motor não recebe corrente permanecendo parado. É a condição de potência mínima do controle.
À medida que deslocamos o cursor em direção ao resistor R1, a corrente de base aumenta suavemente e com isso aumenta a corrente no coletor do transistor, mas de forma multiplicada. A corrente de coletor será tantas vezes maior que a corrente de base quanto for o ganho do transistor. Com o aumento da corrente, o motor acelera até atingir sua potência máxima. Este aumento de corrente segue até o ponto em que ocorre a saturação do transistor conforme mostra o gráfico da figura 10.
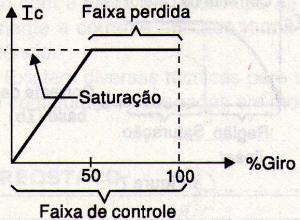
Figura 10- Curva mostrando a faixa perdida quando ocorre a saturação do transistor.
Na situação ideal, o resistor R1 deve ser calculado para que esta saturação ocorra no extremo (máximo) do movimento do cursor do potenciômetro, mas na prática nem sempre isso é possível, pois os transistores variam muito de ganho mesmo entre os do mesmo tipo (com a mesma numeração). Assim, o melhor num projeto deste, é que depois de montado o próprio leitor verifique o ponto em que ocorre a saturação. Se for antes do máximo do giro do potenciômetro aumente R1 e se não ocorrer mesmo quando ele chegar ao fim, diminua R1.
Este mesmo circuito pode ser elaborado com transistores PNP adquirindo então a configuração mostrada na figura 11.
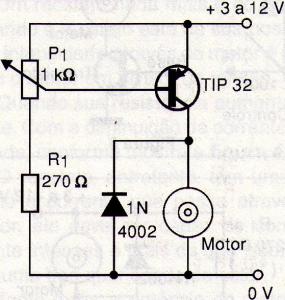
Figura 11 – Circuito equivalente utilizando transistor PNP.
O transistor pode ser o BD136 para 500 mA, TIP32 para 2 A e TIP2955 para 4 ampères. Valem as mesmas considerações que fizemos para os circuitos com transistores NPN.
Circuitos Darlington
Para podermos controlar as correntes elevadas de motores e outras cargas a partir de correntes ainda menores, podemos associar diversos transistores e a configuração mais comum é a denominada Darlington.
Na figura 12 temos o modo de conectarmos dois transistores NPN de modo a obtermos uma etapa amplificadora Darlington.
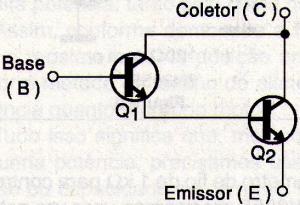
Figura 12 – Circuito com dois transistores com acoplamento Darlington.
Este circuito se comporta como um único transistor cujo ganho seja o produto dos ganhos dos transistores usados. Por exemplo, se Q1 possuir ganho 200 e Q2 tiver ganho 50, o ganho do circuito será 50 x 200 = 000, ou seja, ele se comportará como um único transistor de ganho 10 000. Assim, para termos um controle linear de potência usando um circuito como este,basta agregarmos o dispositivo de controle, que pode ser um potenciômetro de valor bastante alto, conforme mostra a figura 13.
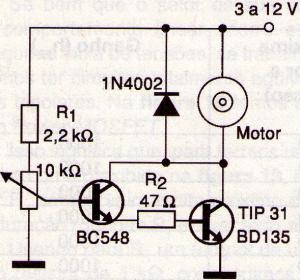
Figura 13 – Controle linear com par de transistor na configuração Darlington.
Um potenciômetro de 10 000 ohms, como o usado no circuito da figura 13 deixa passar uma corrente de apenas 1 mA quando alimentado com 10 V. Com esta corrente, e com os transistores proporcionando um ganho de pelo menos 1 000 vezes podemos controlar uma carga de até 5 ampères (1 000 x 0,001 = 1 A). Veja que nestas condições não precisamos mais de um potenciômetro de fio no controle. Um potenciômetro comum de baixa dissipação (carbono) serve perfeitamente. Para o circuito mostrado, com transistores BC548 e TIP31 podemos controlar cargas de até uns 2 ampères, sem problemas. Transistores como o TIP41 em lugar do tip 31 podem controlar correntes ainda maiores. A mesma configuração pode ser elaborada com transistores PNP, conforme mostra a figura 14.
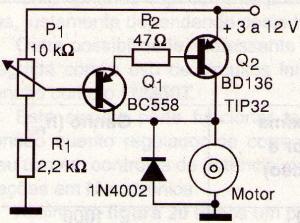
Figura 14 – Circuito Darlington com transistores PNP.
Transistores Darlingtons
Para o leitor que deseja usar esta solução no controle linear de motores e outras cargas existe uma alternativa interessante. Existem componentes, que na verdade são formados por pares de transistores já ligados na configuração Darlington, disponíveis num invólucro único.
Estes componentes são chamados "transistores Darlington" e tem tipicamente o circuito equivalente e aparência mostrados na figura 15.

Figura 15 – Circuito equivalente, símbolo e aspecto de um transistor Darlington NPN.
A Texas Instruments fabrica uma série importante de transistores Darlington de boa potência, que são ideais não só para controles lineares de potência como para outras aplicações, inclusive as pontes H que estudamos no artigo anterior desta série. Na figura 16 mostramos então controles lineares de potência com transistores TIP da Texas que tanto podem ser NPN como PNP.
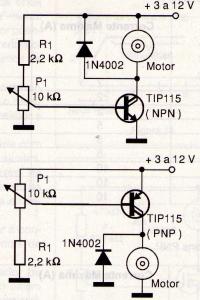
Figura 16 – Controles lineares com transistores Darlington NPN e PNP.
As tabelas abaixo dão as características dos transistores que podem ser usados nestes circuitos:
Darlingtons NPN
| Tipo | Corrente Máxima (A) | Tensão máxima entre coletor e emissor (Vceo) - (V) | Ganho (hFE) |
| TIP110 | 2 | 60 | 1000 |
| TIP111 | 2 | 80 | 1000 |
| TIP112 | 2 | 100 | 1000 |
| TIP120 | 5 | 60 | 1000 |
| TIP121 | 5 | 80 | 1000 |
| TIP122 | 5 | 100 | 1000 |
| TIP140 | 10 | 60 | 1000 |
| TIP141 | 10 | 80 | 1000 |
| TIP142 | 10 | 100 | 1000 |
Darlingtons PNP
| Tipo | Corrente Máxima (A) | Tensão máxima entre coletor e emissor (Vceo) - (V) | Ganho (hFE) |
| TIP115 | 2 | 60 | 1000 |
| TIP116 | 2 | 80 | 1000 |
| TIP117 | 2 | 100 | 1000 |
| TIP125 | 5 | 60 | 1000 |
| TIP126 | 5 | 80 | 1000 |
| TIP127 | 5 | 100 | 1000 |
| TIP145 | 10 | 60 | 1000 |
| TIP146 | 10 | 80 | 1000 |
| TIP147 | 10 | 100 | 1000 |
Outras configurações
Os transistores comuns bipolares podem ser usados em outras configurações para o controle linear de potência, como por exemplo a velocidade de motores de corrente contínua. Uma possibilidade de uso de transistores complementares (um PNP e um NPN) é mostrada na figura 17.
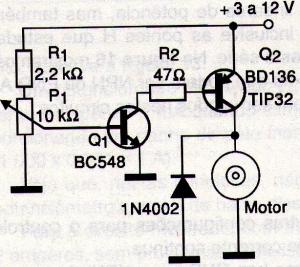
Figura 17 – Configuração com transistores complementares.
Nesta configuração o transistor NPN (que pode ser um BC548) controla a corrente de base de um PNP de potência (um TIP32, por exemplo). O ganho desta etapa é aproximadamente o produto dos ganhos dos transistores usados.
Outros Componentes
Não são apenas transistores bipolares que podem ser usados no controle linear de potência, com a configuração básica que analisamos neste artigo. Outros componentes que possuem características lineares de operação em algum ponto de sua curva de comportamento elétrico também podem ser aproveitados. Um primeiro deles é o MOSFET de Potência ou Transistor de Efeito de Campo de Potência. Se bem que o setor da sua curva característica em que o comportamento linear ocorra esteja "espremido" numa pequena faixa de tensões, se trabalharmos neste setor podemos ter circuitos totalmente equivalentes ao dos transistores bipolares. Na figura 18 temos a curva característica de um Power MOSFET.
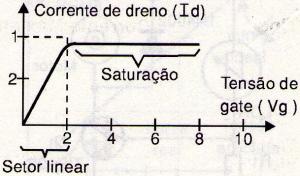
Figura 18 – Curva característica de um MOSFET de potência.
Isso significa que, para termos um controle linear num circuito como o mostrado na figura 19, é preciso colocar o resistor R1 num valor muito próximo ao que leva o transistor à saturação quando P1 estiver todo aberto.
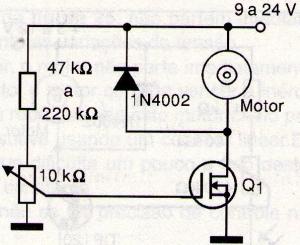
Figura 19 – Controle linear de velocidade utilizando um MOPSFET de potência.
Usando para R1 um trimpot de uns 100 k ohms em série com um resistor de 1 k ohms conseguimos isso através de ajustes. Neste circuito, qualquer transistor de efeito de campo de potência pode ser usado para controles motores de corrente contínua cuja corrente pode chegar a vários ampères, justamente dependendo deste transistor.
Outra possibilidade interessante de controle linear de modo é conseguida com o uso de circuitos integrados reguladores de tensão como o LM350T. Este circuito pode funcionar tanto como regulador de tensão como regulador de corrente possibilitando assim seu uso em controles de potência muito interessantes para aplicações em mecatrônica. Assim, na figura 20 temos um primeiro circuito em que o LM350T é usado para controlar a velocidade de um motor ou a corrente numa carga através da tensão aplicada.
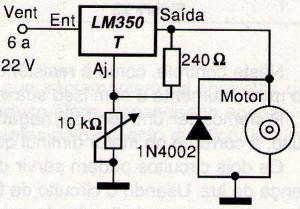
Figura 20 – Controle linear utilizando o circuito integrado LM350T.
A tensão na carga vai variar entre 1,2 V (que é a tensão mínima que o LM350T fornece em sua saída, devido ao zener interno) até uns 2 V a menos que a tensão de entrada. A corrente máxima que este circuito pode fornecer é de 3 ampères. Uma outra aplicação é como controle de corrente constante, o que nos possibilita manter o torque constante de um motor mesmo quando ele é carregado. O que esse circuito faz é aumentar automaticamente a tensão aplicada no motor quando ele é carregado e sua corrente tende a aumentar exigindo assim mais potência. Com isso, a corrente se mantém juntamente com torque.
Na figura 21 mostramos como isso pode ser feito usando o LM350T.
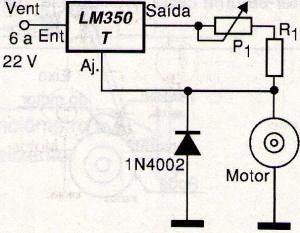
Figura 21 – Controle de corrente constante com um regulador linear de tensão.
A corrente que vai circular no motor pode ser ajustada por P1 numa faixa que terá o valor máximo dependente de R1. A fórmula para calcular R1 é:
R1 = 1,25/I
Onde: R1 é dado em ohms
I é a corrente máxima em ampères no motor
A corrente mínima depende do valor de P1 e será dada por:
I = 1,25/(R1+P1)
Por exemplo, para um motor de 1 ampère, usamos R1 = 1,25 ohms.
Usando um potenciômetro de fio de 100 ohms a corrente mínima no motor (posição de máxima resistência) será de :
I = 1,25/(1,25 + 100)
I = 1,25/101,25
I = 0,00123 A = 1,23 mA
Outros reguladores de tensão de três terminais como o LM117 podem ser usados da mesma forma. Valem as mesma fórmulas para os cálculos. Apenas observamos que o LM117 tem uma corrente máxima de saída de 1,5 A.
Usando Sensores e Outros Modos de Acionamento
Os circuitos de maior sensibilidade que vimos neste artigo admitem a substituição dos potenciômetros de maior valor por sensores resistivos de mesma resistência. Isso significa que alguns destes circuitos podem ser usados como controles de motores a partir de sinais luminosos usando como sensores LDRs ou a partir de sensores térmicos (NTCs).
Também podem ser usados sensores de pressão ou de posição, desde que a informação enviada ao circuito seja na forma de uma resistência variável. Na figura 22 damos um exemplo de um controle de potência por intensidade luminosa de ação positiva.
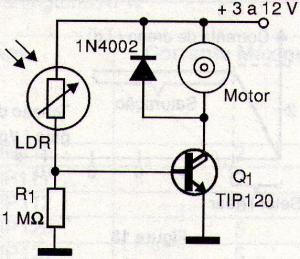
Figura 22 – Controlando a velocidade de um motor pela luz.
Neste controle, como a resistência do LDR diminui com a intensidade de luz incidente, a corrente no motor aumenta e com isso sua velocidade. Podemos ter um controle negativo usando a configuração mostrada na figura 23.
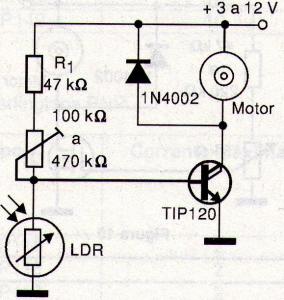
Figura 23 – Controle inverso de um motor pela luz. A sobra atua sobre o sensor.
Neste circuito, a corrente no motor diminui quando a intensidade da luz incidente no sensor aumenta. Os dois circuitos podem servir de base para controles de movimento de robôs baseados na presença de luz. Usando o circuito da figura 2, por exemplo, o robô diminui sua velocidade ao se aproximar de uma parede iluminada ou de uma fonte de luz qualquer. A idéia de um robô que tenha fotofobia (medo da luz) é algo que pode ser implementada facilmente com este circuito. Agregando-se um circuito de memória, pode-se combinar esse circuito e com isso obter-se uma certa “inteligência” para o robô, capaz de memorizar fontes de luz. Uma idéia para o uso dos circuitos que analisamos com outros modos de acionamento é a montagem de potenciômetros deslizantes ou mesmo rotativos em pedais, conforme mostra a figura 24.
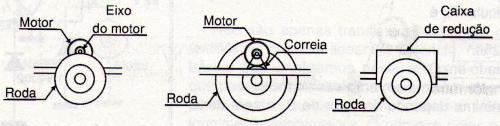
Figura 24 – Uso de potenciômetros como sensores.
Com as configurações mostradas nesta figura é possível controlar a velocidade de pequenos motores de corrente contínua usando os pés.
Inércia
Um dos problemas que os controles lineares de velocidade apresentam quando operam com motores de corrente contínua está na inércia. Os motores quando alimentados com uma tensão que cresce linearmente a partir de zero, conforme mostra o gráfico da figura 25 não partem imediatamente e nem mantém uma velocidade que acompanha linearmente as variações da tensão.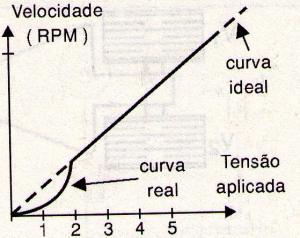
Figura 25 – Efeito da inércia num controle de motor.
Atuando sobre o controle (potenciômetro) de um circuito linear, o motor não parte imediatamente. É preciso ir girando o controle até que em determinado momento, o motor consiga vencer a inércia e com isso partir já com uma certa velocidade. Num veículo ou robô que use este motor como propulsão isso significa que dificilmente se consegue uma partida suave usando um controle linear. Ele parte aos "soquinhos" ou “dá um tranco” e logo deslancha o que dificulta um pouco o uso destes circuitos num controle de movimento que exija precisão e torque constante. No controle de outros automatismos, essa possibilidade de não se ter precisão de controle nas baixas rotações pode ser um sério inconveniente para o projeto. Para termos uma melhor precisão e torque mais constante em baixas velocidades existem outras técnicas, como por exemplo a que faz uso de Modulação de Largura de Pulsos ou PWM que será justamente o assunto em outro artigo desta série.
Projetos Práticos
Os projetos dados a seguir são apenas sugestões simples que implementam os controles que estudamos nesta lição. Evidentemente, os leitores podem ir muito além, dependendo apenas do grau de conhecimentos que já possuam. Muitas delas são importantes pelo aspecto didático já que podem ensinar na prática o que aprendemos com este artigo.
Base de Robô
Para o leitor que deseja por em prática o que vimos nesta lição, nossa sugestão é um robô ou veículo dirigido por fio com controle diferencial.
O que vamos fazer é uma base com dois motores e dois sistemas de redução que ficam a cargo do leitor podendo ser usadas caixas de redução, acoplamento direto do eixo do motor na roda ou correia, um de cada lado, conforme mostra a figura 26.
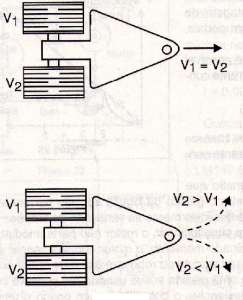
Figura 26 – Dois motores possibilitam a movimentação da base robótica em qualquer direção.
Quando atuamos sobre os dois controles dos motores podemos fazer com que eles rodem com a mesma velocidade e com isso o veículo se move em linha reta. Atuando sobre um ou outro potenciômetro de modo a aumentar ou diminuir a velocidade do motor correspondente podemos fazer o veículo ir para a direita ou esquerda, conforme mostrou a figura 26. O circuito para o controle é dado na figura 27.
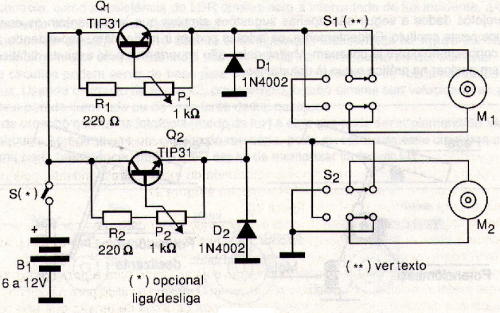
Figura 27 – Circuito completo de controle de direção e velocidade utilizando dois transistores e duas chaves reversíveis.
Na figura 28 temos a montagem do controle usando como base uma ponte de terminais que consiste numa alternativa econômica ideal para iniciantes. Os leitores mais avançados podem fazer a mesma montagem usando uma placa de circuito impresso.
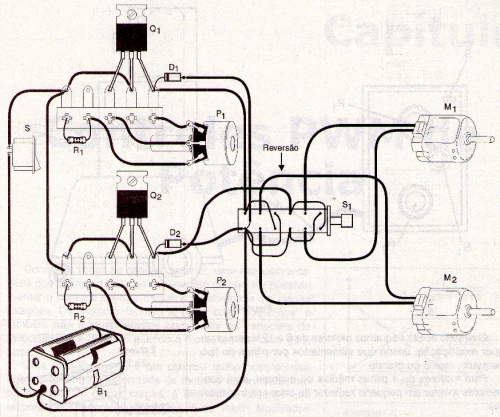
Figura 28 – Montagem do controle utilizando pontes de terminais para os transistores.
Na montagem em ponte de terminais o leitor deve estar atento para a posição dos transistores, pois se eles forem invertidos o circuito não vai funcionar. O mesmo é válido para a posição dos diodos. A finalidade dos diodos é proteger os transistores contra os picos de tensão que são gerados nas escovas dos motores quando eles funcionam. O circuito aceita pequenos motores de 6 a 12 V sem qualquer modificação desde que alimentados por pilhas do tipo pequeno, médio ou grande. Para motores de 4 pilhas médias ou maiores será conveniente montar um pequeno radiador de calor nos transistores.
Uma idéia interessante para um controle manual do veículo consiste em se usar uma caixinha com o circuito adicional de reversão de polaridade que permite ir para frente e para trás, conforme mostra a figura 29.
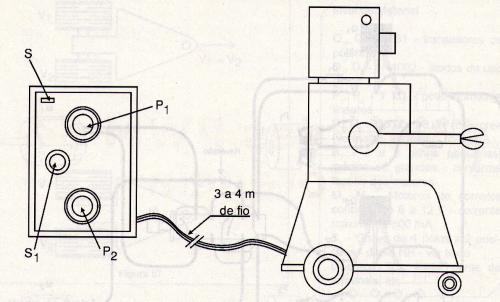
Figura 29 – Sugestão de projeto de robô controlado com o circuito descrito.
O circuito de reversão de polaridade que faz a base móvel ir para frente e para trás é obtido com uma chave dupla HH . Se esta chave não for conseguida com facilidade no mercado de componentes eletrônicos, podemos adaptá-la usando duas chaves de 2 pólos x 2 posições comuns, colando nos seus elementos de acionamento um pedaço de plástico ou madeira de modo que elas possam ser ligadas ao mesmo tempo.
Sugestão: que tal elaborar um robô de combate com base nesta configuração!
Lista de Material
Q1, Q2 -TIP31 - transistores de potência
D1, D2 - 1N4002 - diodos de uso geral
P1, P2 - 1 k ohms - potenciômetros lineares
R1, R2 - 220 ohms x 1/8 W - resistores (vermelho, vermelho, marrom)
B1 - 4 a 8 pilhas pequenas, médias ou grandes - conforme tensão dos motores
M1, M2 - Motores de corrente contínua de 6 a 12 V - corrente máxima de 500 mA
S1 - Chave de 4 pólos x 2 posições - dupla HH - ver texto
Diversos: fios, solda, ponte de terminais, etc.