










Os motores de passo são usados numa infinidade de equipamentos modernos, tais como: impressoras, scanners, drives de disquetes em computadores, automatismos diversos, robótica e mecatrônica. Evidentemente, encontramos estes motores em muitas aplicações que envolvem posicionamento preciso de peças e dispositivos associados. Conhecer o funcionamento destes motores é de vital importância para qualquer profissional da área. Neste artigo abordamos alguns fundamentos relevantes do funcionamento dos motores de passo.
MEC167S
O que são os motores de passo?
Podemos dizer que os motores de passo, assim como os motores comuns, são dispositivos que convertem energia elétrica em energia mecânica disponível na forma de torque.
No entanto, os motores de passo possuem algumas características próprias que os diferencia dos motores comuns, a saber:
a) os motores de passo funcionam como dispositivos posicionadores, pois podem parar numa posição perfeitamente controlada.
b) os motores de passo também podem funcionar como motores de velocidade perfeitamente controlada, sendo energizados numa determinada ordem.
Estas características são ainda acrescidas a outras que os tornam ideais para aplicações em informática, eletrônica industrial e de controle, robótica e mecatrônica:
a) Eles podem ter seu eixo posicionado em um ângulo proporcional ao número de impulsos de entrada.
b) Os erros que ocorrem no posicionamento do seu eixo são muito pequenos e não são cumulativos. Um motor de passo pode ser posicionado com uma precisão de 1 milésimo de radiano tipicamente, conforme sugere a figura 1.

c) O controle sem realimentação (open loop) é possível devido ao uso de sinais digitais para esta finalidade.
d) As respostas à partida, à parada e a reversão são muito rápidas.
Tudo isso torna o motor de passo um elemento sem equivalente em diversas aplicações.
Aplicações típicas:
Na figura 2 temos uma aplicação industrial de um motor de passo, que consiste numa bomba de líquido, com fluxo constante.
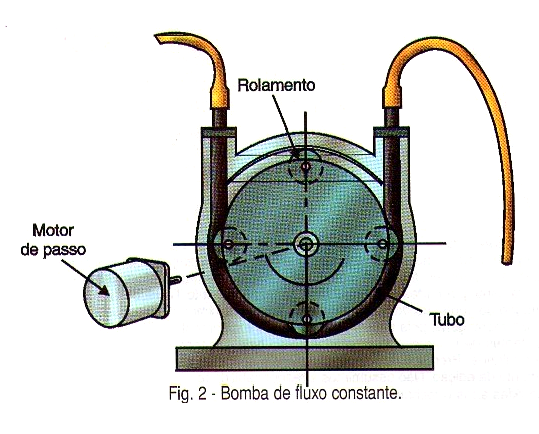
O motor de passo é controlado por um circuito processador que recebe informações sobre o fluxo de líquido mantendo-o desta forma constante.
Na figura 3 mostramos a aplicação do motor de passo no posicionamento da cabeça de leitura e gravação de um drive de disco flexível.

Outra aplicação importante é ilustrada na figura 4, onde o motor de passo é usado tanto para posicionar o papel, avançando-o ou recuando, como também para movimentar com precisão a cabeça de impressão sobre o papel.

Em automação, elevadores, robótica e mecatrônica o motor de passo pode ser empregado em precisos controles de movimento com a estrutura em blocos mostrada na figura 5.

TIPOS DE MOTORES DE PASSO
Existem três tipos básicos de motores de passo, que são:
* Relutância variável
* Imã permanente
* Híbrido
Analisemos as principais características de cada um.
a) Relutância variável:
Na figura 6 temos uma vista em corte da construção de um motor de passo de relutância variável.
Conforme podemos ver, é a ação das bobinas criando campos que posiciona os dentes de material ferromagnético acoplados a um eixo móvel. O rotor múltipolo deste motor é feito de ferro macio, enquanto que o estator é multilaminado.
O rotor deste tipo possui uma inércia pequena.
b) Imã permanente:
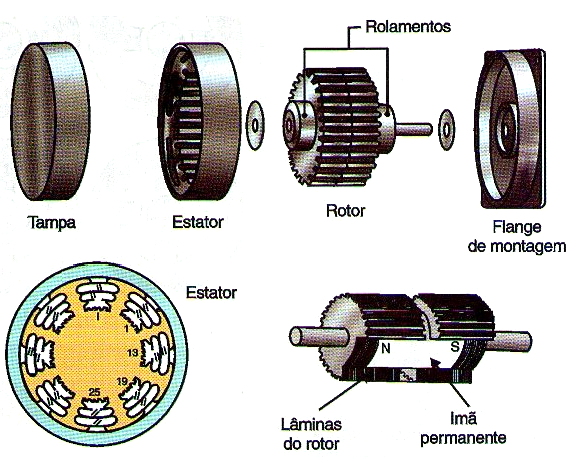
Na figura 7 temos uma vista em corte de um motor deste tipo.

Este motor gira quando o campo magnético das bobinas energizadas interage com um conjunto de imãs permanentes.
O rotor é energizado radialmente.
Este tipo de motor é indicado para aplicações onde não se exige precisão, e o custo seja importante já que tem um preço baixo. Outra característica é sua operação com ângulos de passo grandes, entre 45 e 90 graus.
c) Híbridos
Estes motores têm a construção do tipo ilustrado na figura 8.

O rotor é energizado axialmente. Tanto o rotor como o estator são do multipolares.
A principal vantagem deste motor é a sua precisão com passos de 1,8 graus nos tipos mais comuns, e chegando mesmo a 0,36 graus nos tipos de maior precisão.
Modos de Excitação:
Os motores de passo são formados por 4 bobinas que devem ser excitadas numa certa ordem, ou ainda de acordo com o posicionamento desejado.
A configuração típica destas bobinas é apresentada na figura 9 onde também vemos os modos de ligação mais comuns, que são o unipolar e o bipolar.

A excitação de fase destas bobinas depende da aplicação e pode ser feita das seguintes maneiras:
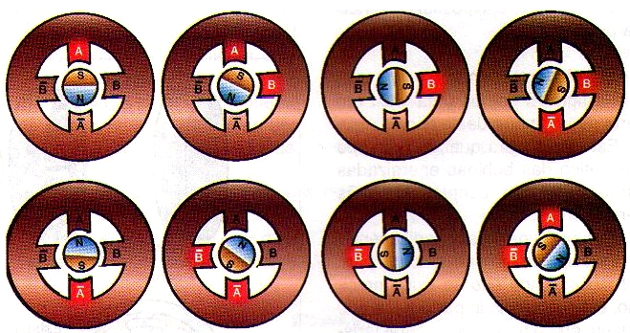
A) Uma fase ou onda (wave)
Nesta excitação cada bobina é energizada separadamente em sequência de acordo com o movimento de posicionamento do rotor, conforme mostra a figura 10.
.")
B) Duas fases
Nesta modalidade de operação, exemplificada na figura 11, as bobinas são energizadas duas a duas de modo que o rotor possa parar em posições intermediárias dadas pela resultante das forças de atração entre as bobinas.

C) Uma-Duas fases
Nesta modalidade de funcionamento, uma e duas fases são excitadas alternadamente levando o rotor ao movimento ou posição desejada, veja a figura 12.
D) Duas fases ou micropasso
Nesta modalidade temos a aplicação de níveis de tensão diferenciados na bobina, o que permite o posicionamento do rotor em pontos intermediários aos polos das bobinas energizadas, veja a figura 13.

O escalonamento das tensões aplicadas às bobinas vai determinar quantos pontos intermediários entre dois passos (90 graus) podem ser obtidos.
Conclusão:
A escolha do tipo e do modo de operação depende da aplicação.
Assim, para saber usar corretamente um motor de passo existem outras informações importantes que serão abordadas oportunamente em novos artigos.
