Controlar a velocidade de um motor de corrente contínua é algo que não traz muitos problemas ao projetista de Robótica ou Mecatrônica. No entanto, fazer o controle com a reversão de sentido é algo que ainda embaraça aqueles que não conhecem as pontes H. Utilizadas praticamente em todos os casos em que se deseja um controle bidirecional de um motor de corrente contínua, as pontes H consistem numa configuração que todos os que trabalham com projetos nas áreas de Robótica, Mecatrônica e Automação devem conhecer. Neste artigo, analisamos o princípio de funcionamento destas pontes e damos alguns circuitos práticos.
O sentido de rotação de um motor de corrente contínua depende do sentido de circulação da corrente pelos seus enrolamentos. Isso significa que, invertendo a polaridade da alimentação de um motor, invertemos também o seu sentido de rotação, conforme sugere a figura 1.

Esta possibilidade de se inverter o movimento de um motor, e portanto de qualquer dispositivo mecânico que ele controla pela simples inversão da corrente, leva-nos a diversas aplicações importantes nas áreas citadas acima.
Podemos fazer circuitos de controle totalmente eletrônicos, relativamente simples, que invertem o sentido de movimentação de um mecanismo sem a necessidade de se usar qualquer recurso mecânico especial, tais como caixas de engrenagens ou outros.
Diversas são as maneiras de fazer a inversão do sentido de circulação da corrente para se obter o controle de um motor.
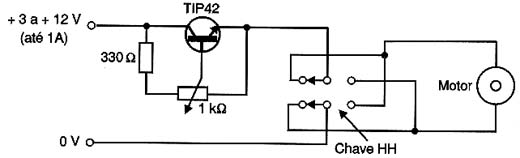
A mais simples é a que faz uso de uma chave manual do tipo H-H ou de dois pólos x duas posições, e é ligada de acordo com a figura 2.

Esta chave faz a inversão do sentido da corrente pelo menor de modo que ele gire num sentido ou noutro.
Podemos associá-la a um controle de velocidade manual simples como, por exemplo, o que faz uso de um reostato eletrônico, observe a figura 3.
O controle automático pode ser feito com a ajuda de um relé. Com o relé energizado, o motor gira num sentido, e quando não energizado, ele gira em outro, conforme ilustra a figura 4.

O acionamento do relé por um circuito lógico pode ser feito com facilidade utilizando-se o diagrama da figura 5.

Pode-se utilizar um transistor comum como em (a) para acionamento com um sinal de maior intensidade, ou utilizar um Darlington como em (b) para um acionamento com um sinal de menor potência.
No entanto, existe uma terceira forma de fazer o controle de sentido de um motor DC, que é muito mais versátil e que é justamente o assunto deste artigo: a ponte H.
PONTES H
Na figura 6 temos o circuito básico de uma ponte H usando transistores bipolares comuns, e a partir de onde analisaremos o seu princípio de funcionamento.

A idéia básica neste circuito é fazer com que dois dos quatro transistores conduzam de cada vez, e de uma maneira que o sentido de circulação da corrente pelo motor possa ser invertido.
Assim, se deixarmos no corte Q2 e Q3 e levarmos Q1 e Q4 saturados, conforme mostra a figura 7(a), a corrente circula pelo motor num sentido, e se fizermos agora com que Q2 e Q3 fiquem saturados e Q1 e Q4 sejam levados ao corte, a corrente circula no sentido oposto veja exemplo na figura 7(b).

Para obter esta operação podemos facilmente empregar um circuito de comando manual indicado na figura 8, em que a posição da chave ou de um relé determina qual par de transistores vai conduzir.

Evidentemente, num circuito como o indicado, os transistores devem ser dimensionados para suportar as correntes exigidas pelo motor. Na prática, para aplicações com pequenos motores de 6 V ou 12 V indicamos os BD135 para correntes até 1 A, e os TIP31 para correntes até uns 2 ou 2,5 A. Os 2N3055 podem ser usados com motores maiores, no entanto, também precisam de uma corrente maior de controle.
Uma alternativa para operar motores de correntes elevadas, controlando-os com pequenas correntes, é o uso de transistores Darlington de potência como no circuito ilustrado na figura 9.

Nestes circuitos um pequeno problema pode significar uma certa instabilidade, dependendo da aplicação: o transistor fica no corte por falta de polarização de base, ou seja, opera com a base aberta.
Podemos melhorar isso com um comando lógico que faz com que os transistores NPN que devam ficar no corte tenham sua base colocada à terra (nível baixo), e os transistores que devem ser levados à saturação fiquem no nível alto. Este circuito é apresentado na figura 10, com a vantagem de que a comutação dos estados para os pares de transistores é comandada pelo sinal de entrada.

Em outras palavras, neste circuito o sentido de rotação do motor depende do nível lógico aplicado à entrada.
Uma situação intermediária que deve ser prevista é a que leva todos os transistores ao corte, caso precisemos parar o motor.
Uma solução simples consiste em controlar diretamente a corrente que alimenta o circuito de potência com um relé ou outro tipo de comutador como, por exemplo, um transistor de potência adicional em série.
USANDO FETs DE POTÊNCIA
Um dos maiores problemas que encontramos quando procuramos controlar um motor de corrente contínua com um transistor reside na perda de energia que temos no transistor em condução.
A queda de tensão entre o coletor e o emissor de um transistor bipolar de potência quando em condução pode significar em alguns casos uma boa perda de potência, que é transformada em calor.
Para uma corrente de 2 ampères num transistor em que ocorra uma queda de tensão de 1,5 V quando saturado, veja a figura 11, significa 3 W de perda.

Se alimentarmos o motor com baixas tensões, estas perdas podem significar muito, afetando o próprio desempenho do circuito. Num circuito de 12 V, por exemplo, esta perda ultrapassa os 10%.
Além da queda de desempenho temos ainda como fator adicional a ser considerado a exigência de dissipadores de calor, tanto maiores quanto maiores forem as correntes que devem ser controladas.
Fala-se muito no uso de FETs de potência para substituir os transistores bipolares neste tipo de aplicação.
De fato, a resistência no estado de condução de um FET de potência denominada Rds(on) é extremamente baixa para os tipos comuns, podendo chegar a menos de 0,001 ? em alguns tipos!
O resultado disso é que praticamente não existe queda de tensão num FET em plena condução, e portanto não temos perdas e não precisamos de dissipadores de calor de grandes dimensões.
Na prática, entretanto, não é o que se nota e isso pode surpreender alguns projetistas menos avisados.
A resistência em condução de um Power-FET é baixa quando tensões elevadas de comporta são usadas na sua excitação.
Assim, se considerarmos um transistor de efeito de campo de potência conhecido como o IRF640, vemos que sua Rds(on) é de apenas 0,18 ?, com uma tensão entre a comporta e a fonte (Vgs) de 10 V. Para tensões menores, esta resistência sobe acentuadamente, chegando mesmo a ser maior do que a encontrada em transistores bipolares comuns.
Isso significa que, a não ser que tenhamos tensões elevadas para excitar os Power-FETs, o seu uso não é recomendável nos controles de motores. O valor mínimo que torna estes componentes úteis para controle, com características melhores que a dos transistores bipolares comuns, é com uma tensão de controle acima de 6 V.
MAIS CIRCUITOS PRÁTICOS
Além dos circuitos práticos que sugerimos com transistores bipolares, podemos incluir alguns outros com transistores FET de potência e também mistos.
O primeiro circuito a ser abordado é o da figura 12 em que temos uma mistura de transistores bipolares com FETs de potência, e que serve para motores de até uns 2 A com tensões na faixa de 12 a 24 volts.

São empregados como transistores bipolares os BD136 se a corrente exigida pelo motor for de até 1 A. Para correntes maiores (até 2 A) podem ser usados os TIP32, e finalmente para correntes de até uns 4 A são indicados os TIP42, sempre montados em radiadores de calor.
Os FETs de potência podem ser os IRF640 ou quaisquer outros com corrente de acordo com os motores usados.
Os sinais aplicados nas entradas determinam qual par de transistores que deverá conduzir.
Na figura 13 temos um interessante circuito biestável de toque para controle de motor DC, que é controlado por dois interruptores de pressão.

Quando a alimentação do circuito é estabelecida, o transistor Q3 conduz antes de Q4 (que precisa de mais tempo para sua tensão de comporta subir dada a presença do capacitor). Isso faz com que Q2 também conduza, e tanto Q4 como Q1 permaneçam no corte, estabelecendo assim um sentido de condução da corrente de Q2 para Q3.
Se pressionarmos S1, o transistor Q3 desliga, e com isso também Q2, de modo que o capacitor agora carregado faz com que Q4 conduza, e com isso também Q1 invertendo o sentido de circulação da corrente pelo motor. Um toque em S2 traz o circuito de volta à situação inicial.
Finalmente, temos na figura 14 uma ponte H completa com transistores FET de potência.

Esta ponte pode controlar motores com correntes de vários ampères, dependendo apenas do FET de potência usado. FETs com dezenas de ampères de capacidade são disponíveis, observando-se apenas que, em baixas tensões de disparo, a sua resistência Rds(on) pode ser suficiente para que a dissipação ultrapasse os limites recomendados.
Os transistores de excitação podem ser NPNs de uso geral, tais como os BC548 ou 2N2222 e o circuito ainda prevê o uso de LEDs indicadores de sentido de rotação.
CIRCUITOS INTEGRADOS
O uso frequente de controles de motores de potências relativamente altas faz com que alguns fabricantes tenham nas suas linhas de produtos circuitos integrados que contenham todas as funções de uma ponte H de boa potência, num único invólucro.
Um exemplo disso é o LMD 18200 da National Semiconductor, que tem seu diagrama de blocos interno e invólucro mostrados na figura 15.

Este circuito integrado contém uma ponte H de 3 A capaz de operar com tensões de alimentação de até 55 volts.
O mais importante neste circuito é que suas entradas são compatíveis tanto com lógica TTL como CMOS. O uso de transistores de efeito de campo de potência internamente com uma Rds(on) de 0,3 ? por chave garantem um bom controle sem muitas perdas, e portanto com baixa dissipação.
Outros componentes da mesma linha podem ser encontrados com farta documentação na Internet. Sugerimos uma visita dos leitores interessados ao site da National (http://www.national.com) digitando em search "H bridge" ou outros tipos como o LMD18201.