Este tutorial faz parte da série de fundamentos de medição da National Instruments. Cada tutorial dessa série ensinará ao leitor um tópico específico sobre aplicações de medições comuns, explicando a teoria e dando exemplos práticos. Este abrangerá assuntos como sensores e a terminologia associada a eles.
Nota: Artigo publicado na Revista Saber Eletrônica 467 de janeiro/fevereiro de 2013.
Sensibilidade
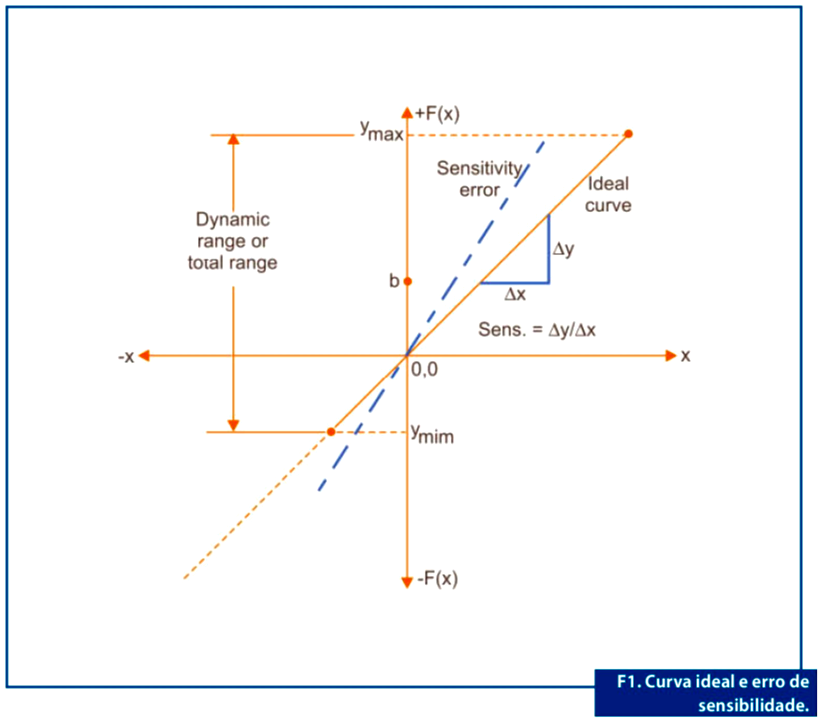
A sensibilidade do sensor é definida como a inclinação da curva característica de saída (AY/AX na figura 1) ou, de forma mais geral, a entrada mínima do parâmetro físico que irá criar uma variação detectável na saída. Em alguns sensores, a sensibilidade é definida como a variação do parâmetro de entrada necessária para produzir uma variação padronizada na saída. Em outros, é definida como uma variação na tensão de saída para uma dada variação no parâmetro de entrada. Por exemplo, um transdutor típico de pressão sanguínea pode ter uma sensibilidade de 10 mv/V/mmHg, isto é, haverá uma tensão de saída de 10 mV para cada volt de excitação e cada mmHg de pressão aplicada.
Erro de sensibilidade
O erro de sensibilidade (mostrado como uma curva pontilhada na figura 1) é um desvio da inclinação ideal da curva característica. Por exemplo, o transdutor de pressão discutido acima pode ter uma sensibilidade real de 7,8 mV/V/mmHg em vez de 10 mV/V/mmHg.
Faixa (Range)
A faixa do sensor são os valores máximo e mínimo que podem ser medidos do parâmetro. Por exemplo, um dado sensor de pressão pode ter uma faixa de -400 a +400 mmHg. Alternativamente, os limites positivos e negativos normalmente não são iguais. Por exemplo, um determinado transdutor de pressão sanguínea médico é especificado para ter um limite mínimo (vácuo) de -50 mmHg (ymin na figura 1) e um limite máximo (pressão) de 450 mmHg (ymax na figura 1). Essa especificação é comum, e é um motivo pelo qual os médicos e enfermeiras incidentalmente algumas vezes destroem sensores de pressão sanguínea ao tentar extrair sangue através de uma linha arterial sem tomar o devido cuidado com a posição das torneiras de fluido no sistema. Uma pequena seringa pode exercer um vácuo tremendo em um sistema fechado.
Faixa dinâmica
A faixa dinâmica é a faixa total do sensor do mínimo ao máximo. Isto é, em termos da figura 1. Ou seja:
Precisão
O conceito de precisão refere-se ao grau de reprodutibilidade de uma medição. Em outras palavras, se exatamente o mesmo valor foi medido várias vezes, um sensor ideal teria exatamente a mesma saída toda vez. Mas, sensores reais produzem uma faixa de valores de saída distribuídos de alguma maneira relativa ao valor correto real. Por exemplo, suponha que uma pressão de exatamente 150 mmHg é aplicada a um sensor. Mesmo que a pressão aplicada nunca mude, os valores de saída do sensor vão variar consideravelmente. Alguns problemas sutis surgem no que diz respeito à precisão quando o valor verdadeiro e o valor médio do sensor não estão dentro de uma certa distância um do outro (por exemplo, a faixa 1-s da curva de distribuição normal).
Resolução
Essa especificação é a menor variação incremental detectável no parâmetro de entrada que pode ser detectada no sinal de saída. A resolução pode ser expressa ou em relação à porcentagem da faixa de leitura (fundo de escala) ou em termos absolutos.
Exatidão
A exatidão do sensor é a diferença máxima que existirá entre o valor real (que deve ser medido por um padrão primário ou um bom padrão secundário) e o valor indicado na saída do sensor. Novamente, a exatidão pode ser expressa ou como uma porcentagem da escala completa ou em termos absolutos.
Offset
O erro de offset (desvio) de um transdutor é definido como a saída que existirá quando deveria ser zero ou, alternativamente, a diferença entre o valor de saída real e o valor de saída especificado sob um conjunto particular de condições. Um exemplo da primeira situação em termos da figura 1 existiria se a curva característica tivesse a mesma inclinação de sensibilidade que a ideal, mas cruzasse o eixo Y (saída) em b em vez de zero.
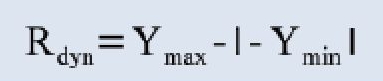
Um exemplo da outra forma de offset é visto na curva característica de um eletrodo de pH mostrado na figura 2. A curva ideal existirá somente a uma temperatura (normalmente 25° C), enquanto a curva real estará entre os limites de temperatura mínima e a temperatura máxima dependendo da temperatura da amostra e do eletrodo.
Linearidade
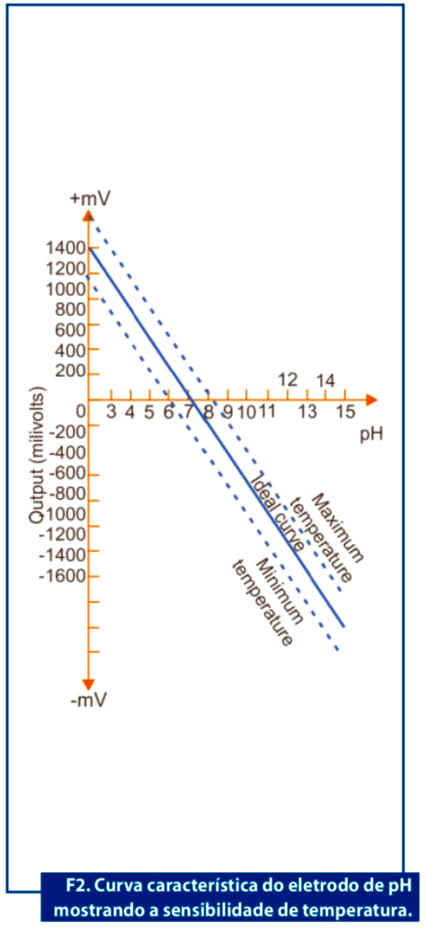
A linearidade do transdutor é uma expressão do grau no qual a curva real medida de um sensor se afasta da curva ideal. A figura 3 mostra uma relação um tanto exagerada entre a linha ideal, ou ajuste de mínimos quadrados, e a linha real medida ou linha de calibração. (Note que na maioria dos casos, a curva estática é usada para determinar a linearidade e isso pode desviar um pouco de uma linearidade dinâmica).
A linearidade é normalmente especificada em termos de porcentagem de não linearidade, que é definida como:
A não linearidade estática definida pela equação acima é normalmente sujeita a fatores ambientais, incluindo temperatura, vibração, nível de ruído acústico e umidade. É importante saber sob quais condições a especificação é válida, e quais dessas condições não devem produzir variações lineares de linearidade.
Histerese
Um transdutor deve ser capaz de seguir as mudanças do parâmetro de entrada indiferentemente da direção em que a variação é feita. A histerese é a medida dessa propriedade. A figura 4 mostra uma curva típica de histerese. Note que é importante a direção em que a variação é feita. Aproximando-se de um valor de entrada fixo (ponto B na figura 4) vindo de um valor mais alto (ponto P), resultará em uma indicação diferente ao aproximar-se do mesmo valor vindo de um valor mais baixo (ponto Q ou zero).
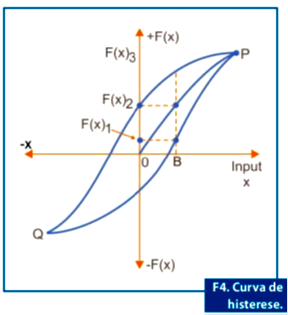
Note que o valor de entrada B pode ser representado por F(X)1, F(X)2, ou F(X)3 dependendo do valor anterior imediato - claramente um erro devido à histerese.
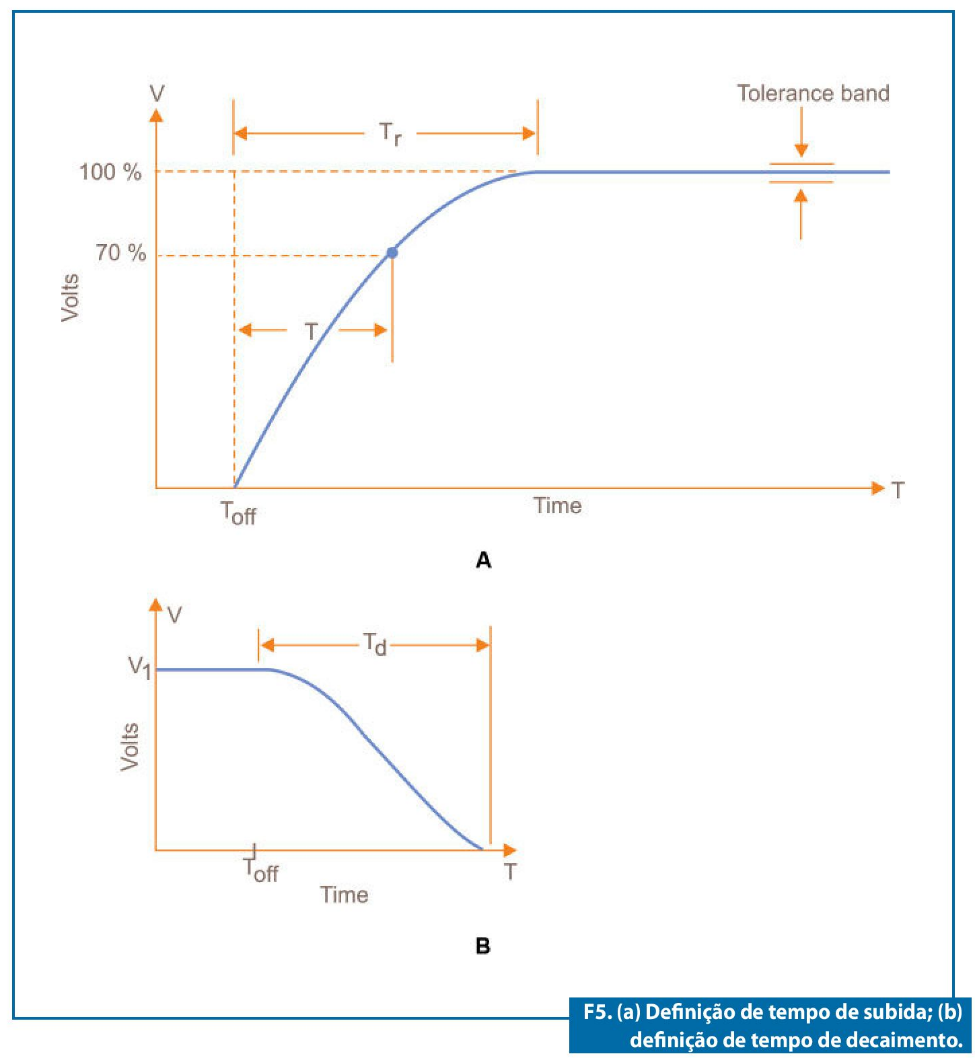
Tempo de resposta
Os sensores não variam o estado de saída imediatamente quando ocorre uma variação no parâmetro de entrada. Mais, ele irá variar para o novo estado ao longo de um período de tempo, chamado de tempo de resposta (Tr na figura 5). O tempo de resposta pode ser definido como o tempo necessário para uma saída de sensor variar a partir do seu estado anterior para um valor final estável dentro de uma faixa de tolerância do valor novo correto. Este conceito é um pouco diferente da noção da constante de tempo (T) do sistema. Este termo pode ser definido de maneira similar à constante de tempo do carregamento de um capacitor através de uma resistência, e é normalmente menor que o tempo de resposta.
As curvas na figura 5 mostram dois tipos de tempo de resposta. A figura 5A representa o tempo de resposta seguindo uma variação brusca de uma função de degrau positiva do parâmetro de entrada. A forma mostrada na figura 5B é um tempo de decaimento (Td para distinguir de Tr, por não ser sempre o mesmo) em resposta a uma variação da função de degrau negativo no parâmetro de entrada.
Linearidade Dinâmica
A linearidade dinâmica do sensor é a medição da sua habilidade de seguir mudanças rápidas no parâmetro de entrada. As características de distorção da amplitude, de distorção da fase e o tempo de resposta são importantes na determinação da linearidade dinâmica. Dado um sistema de baixa histerese (sempre desejável), a resposta da amplitude é representada por:

Na equação anterior, o termo F(X) é o sinal de saída, enquanto os termos X representam o parâmetro de entrada e suas harmônicas, e K é uma constante de offset (se houver). As harmônicas se tornam especialmente importantes quando as harmônicas de erro geradas pela ação do sensor falham nas mesmas bandas de frequência que as harmônicas naturais produzidas pela ação dinâmica do parâmetro de entrada. Todas as formas de onda contínuas são representadas por uma série de Fourier de uma onda senoidal fundamental e suas harmônicas. Em qualquer forma de onda não senoidal (incluindo variações de tempo variável de um parâmetro físico), as harmônicas presentes podem ser afetadas pela ação do sensor. Veja a figura 6.
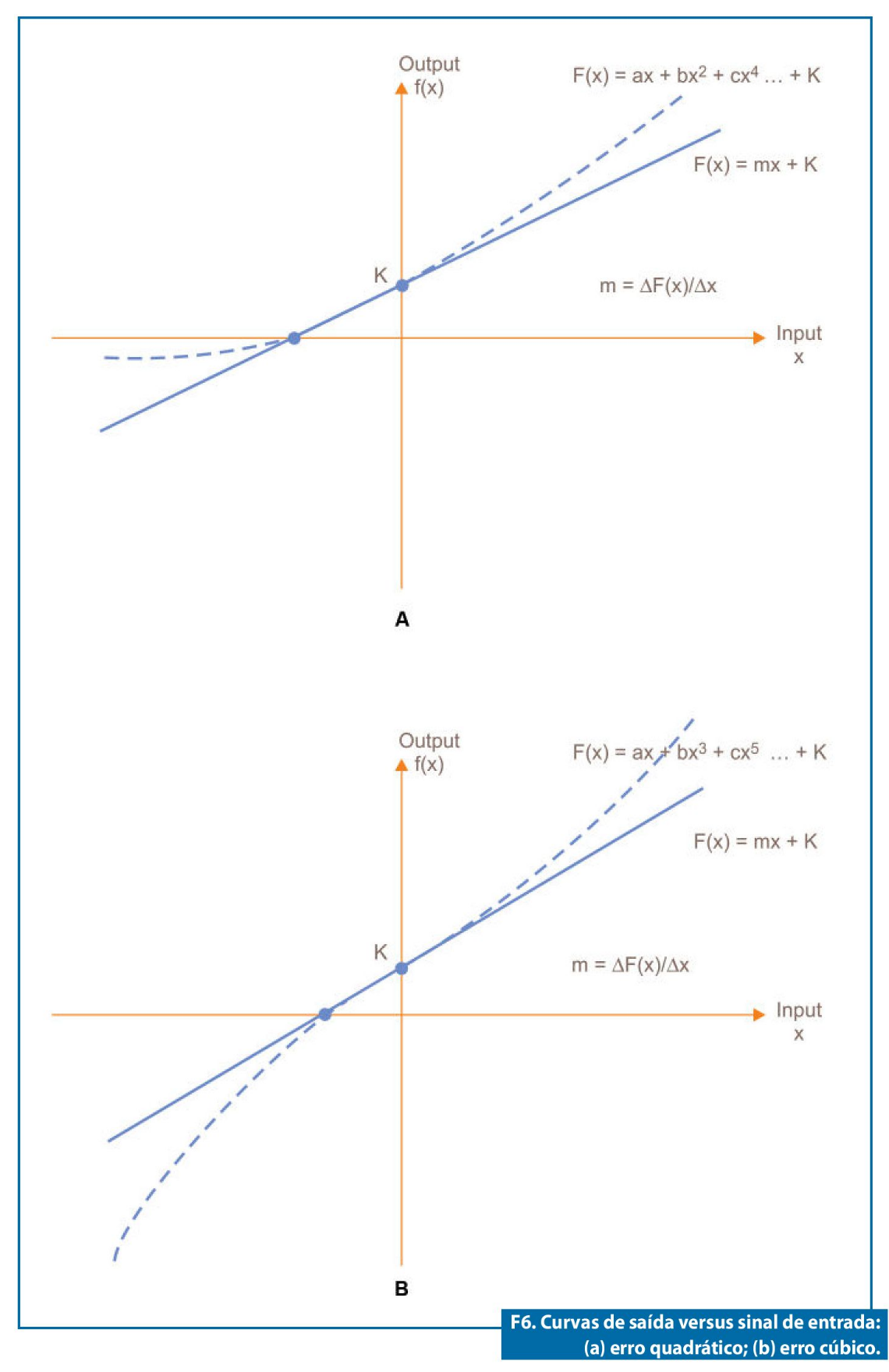
A natureza da não linearidade da curva de calibração diz algo sobre quais harmônicas estão presentes. Na figura 6A, a curva de calibração (mostrada como uma linha pontilhada) é assimétrica, então apenas existem termos ímpares de harmônicas. Assumindo uma forma para a curva ideal de F(x) = mx + K, a equação de vem para o caso simétrico:

No outro tipo de curva de calibração, figura 6B, os valores indicados são simétricos à curva ideal mx + K. Nesse caso, F(X) = -F(-X), e a forma da equação é:
Conclusão
Nesse artigo você aprendeu um pouco sobre um tópico específico sobre aplicações de medições comuns, abrangendo sensores e a terminologia associada.