Este artigo foi publicado em 2005 mas ainda é bastante atual, pois a maioria dos sistemas abordados existem se bem que de forma mais aperfeiçoada a cada ano, mas sempre operando segundo o mesmo princípio. Assim, a tecnologia eletrônica cada vez mais avançada é explicada de forma simples neste artigo.
Este artigo foi publicado em 2005 mas ainda é bastante atual, pois a maioria dos sistemas abordados existem se bem que de forma mais aperfeiçoada a cada ano, mas sempre operando segundo o mesmo princípio. Assim, a tecnologia eletrônica cada vez mais avançada é explicada de forma simples neste artigo.
E eletrônica do automóvel está se tornando cada vez mais complexa, graças a tecnologias avançadas cuja finalidade é controlar todos os dispositivos possíveis. Ignição eletrônica, Injeção Eletrônica, ABS, Sistemas de Conforto, Segurança são exemplos de onde a eletrônica está presente. Desta forma, o conhecimento do princípio de funcionamento dos sistemas automotivos é uma necessidade do profissional da área precisa, e mesmo de todos que desejam usar melhor esses sistemas e para os que gostam de mexer em seus próprios carros.
O termo "eletrônica embarcada" é comumente utilizado para designar os equipamentos usados em automóveis. No entanto, muito mais que isso, o termo também pode ser estendido a outros tipos de veículos tais como barcos e até mesmo aeronaves.
A eletrônica embarcada visa fornecer um sistema inteligente que possa interagir com dispositivos capazes de realizar algum tipo de ação num veículo com sensores que informem quando essas ações precisam ser executadas ou quando não podem.
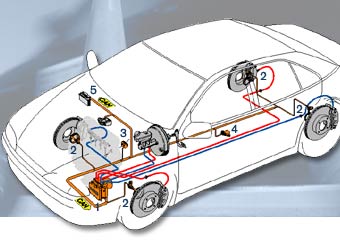
Na figura 1 temos um exemplo de interação entre alguns sistemas sensores e efetores usados num automóvel comum.

Note que alguns tipos de sinais podem interferir em diversos sistemas como, por exemplo, a Chave de Ignição.
O modo como todas as funções são controladas num veículo obedece basicamente a dois tipos de arquiteturas.
Arquiteturas dos Sistemas
O modo como os sinais são analisados, processados e a partir de então gerados os sinais de ações podem ter arquiteturas centralizadas ou distribuídas.
a) Arquitetura Centralizada
Na arquitetura centralizada temos uma ECU central que recebe as informações de sensores e comandos e as processa fornecendo saídas, conforme mostra a figuras 2.

A ECU contém tanto o hardware como o software para a leitura das entradas, processamento a fornecimento dos sinais de saída.
O software é o "programa" que controla o funcionamento do veículo e o hardware consiste nos circuitos que permitem trabalhar com sinais fornecidos por sensores e comandos e que fornecem sinais que podem agir diretamente sobre os elementos efetores.
A principal vantagem desse sistema está na simplicidade do hardware que consiste basicamente de sensores e atuadores, uma unidade de processamento (ECU) e os sensores/atuadores que devem ser controlados.
A ECU varre constantemente as entradas, fornecendo nas saída os sinais necessários aos atuadores.
A principal desvantagem está na necessidade de todo cabeamento convergir para essa unidade, o que além de tornar a fiação volumosa dificulta a manutenção.
Outro problema está na possibilidade de se expandir ou alterar o sistema, pois isso exigiria modificação do hardware e do software, o que não é simples.
b) Arquitetura distribuída
Nessa arquitetura são usadas diversas ECUs colocadas em pontos apropriados do veículo. Cada uma é destinada a execução de determinadas funções atuando sobre determinados sensores e também se comunicando com outras ECUs conforme mostra a figura 3.

Neste sistema também é possível fazer com determinas ECUs apenas leiam as informações de sensores e comandos enquanto que outras apenas controlem atuadores.
Um exemplo de arquitetura desse tipo é encontrada no VW Pólo onde cada porta tem sua própria unidade de comando.
Essa arquitetura apresenta diversas vantagens.
Uma delas consiste na necessidade de pouco cabeamento para o carro, já que as ECUs podem ser instaladas junto aos locais em que devem controlar (sensores e atuadores).
Essa redução do cabeamento também reduz o tempo de manufatura e torna o sistema mais robusto. Menor número de contactos leva a uma menor possibilidade de falhas.
Outro ponto importante a ser considerado é que ele permite uma fácil ampliação do sistema, já que apenas uma ECU é alterada.
A desvantagem está na necessidade de se ter um sistema segura de comunicação entre as ECUs. Como isso é feito é determinado pelo que se denomina Protocolo de Comunicação.
A presença desse protocolo exige um software de controle para a rede, sendo difícil a determinação ideal da velocidade com que cada elemento envie ou receba os dados que devam ser processados.
O maior problema que os projetistas de automóveis encontram é criar uma arquitetura que, com um mínimo de custo ofereça as funções que os usuários desejam com o máximo de confiabilidade.
Exemplos de Sistemas
Para que o leitor tenha uma idéia de que variações o sistema aceita, é interessante tomarmos alguns exemplos práticos.
Assim, na figura 4 temos um exemplo de veículo com uma arquitetura elétrica centralizada.

Nesse veículo temos um sistema de controle (iluminação externa e vidros elétricos). quatro módulos principais, o ECM (Módulo de controle do motor), Rádio, IPC (Instrumentos do Painel) e o BCM (Módulo de Controle da Carroceria).
Quando em funcionamento, o BCM recebe os sinais de entrada dos interruptores de comando dos sistemas correspondentes. Trabalhando com as informações recebidas, ele atua de forma discreta nas saídas que são os motores elétricos e lâmpadas.
Veja que o BCM centraliza o controle desses sistemas sendo totalmente independente dos outros módulos existentes no veículo.
Ao mesmo tempo, o ECM, Rádio e o IPC recebem sinais de entrada os quais são processados aparecendo nas saídas correspondentes. ignição habilitando ou desabilitando o liga/desliga enquanto que o IPC recebe o sinal do sensor de velocidade passando a indicação ao indicador no painel.
Veja que não há necessidade de protocolos de comunicação para esse funcionamento conjunto, pois a ECU tem entradas e saídas discretas que operam com os sinais, e um algoritmo de controle.
Para o caso da Arquitetura Elétrica Distribuída, podemos dar como exemplo o veículo da figura 5.

Neste caso, existem três ECUs conectadas por três redes de comunicação de dados interna.
A primeira rede, Rede 1, é responsável pela troca de dados entre o ECM e o BCM1, trabalhando com uma taxa de transmissão de dados de alta velocidade.
A segunda, Rede 2, é responsável pelo interfaceamento o rádio e o IPC, operando em média velocidade.
Finalmente, temos a Rede 3 que se faz o interfaceamento entre os BCMs 1 e 2 e o IPC, trabalhando em baixa velocidade.
Veja que, nesta arquitetura um sinal recebido por uma das ECUs pode ser enviado para qualquer outra, através das redes de comunicação.
Um exemplo de como isso funciona pode ser dado para o caso de um sensor de velocidade na roda dianteira que envia o sinal para o BCM1, por estar mais próximo, e depois o retransmite para o IPC pela rede 3, de modo a haver a sua indicação no painel.
Veja que esse mesmo sinal pode também ser usado por outro bloco.
Esse é o princípio da rede CAN ou CAB-Bus, onde cada unidade de comando ligada à rede deve suprir suas necessidades em função do uso de cada unidade de processamento.
Assim, a unidade de gerenciamento do motor recebe o sinal da posição da borboleta e o utiliza esses dados também para que eles possam ser usados para comandar a transmissão automática, a unidade do ABS, o controle de potência, etc.
Os Protocolos
Na rede CAN temos um protocolo em que os bits são organizados de tal forma que as unidades possam se comunicar sem problemas. Esse protocolo consta de sete partes com as seguintes funções:
Começo - esse campo utiliza um bit para marcar o começo da transmissão ou recepção de dados.
Estado - esse campo utiliza 11 bits para a definição da prioridade do protocolo.
Controle - são 6 bits que definem a quantidade de informações que vai ser recebida ou enviada.
Dados - são as informações transmitidas ou recebidas propriamente ditas.
Verificação - este campo é composto por 16 bits que são utilizados para detectar falhas na transmissão dos dados.
Conformação - são dois bits utilizados para indicar que os dados foram recebidos corretamente.
Fim - esse campo tem 7 bits que são utilizados para indicar o fim da transmissão do "pacote" de dados.
A figura 6 mostra a organização desse datagrama.

Cada pacote de dados ou datagrama é transmitido em tempos que variam entre 0.25 e 20 milisegundos, dependendo da unidade e da função.
Um ponto importante para o eletricista de automóveis é que o diagnóstico de problemas de funcionamento de veículos que utilizam esse sistema é que ele pode ser feito pelo rastreamento dos sinais.
Através de um único conector OBD II é possível rastrear todos os sistemas. Na figura 7 mostramos esse conector.

Diversas empresas fornecem aparelhos de diagnósticos que, conectados num veículo permitem localizar falhas de funcionamento.
Na figura 8, por exemplo, temos o Rhaster RX da Tecnomotor, um Equipamento que permite comunicar com as centrais eletrônicas dos veículos e consequentemente acessar qualquer informação disponível.
Esse equipamento também pode ser conectado a um computador para uma análise mais detalhadas das informações obtidas numa análise.

Conforme vimos, os diversos dispositivos elétricos e eletrônicos de um veículo são interligados de modo a haver um controle inteligente. O modo como essa comunicação é feita e as ferramentas para o diagnóstico de problemas foram abordados nesta introdução.
Além da Tecnomotor (www.tecnomotor.com.br), o leitor também pode consultar o site da Alfatest (www.alfatest.com.br).
Veremos agora alguma coisa sobre alguns sistemas específicos encontrados nos automóveis, com uma breve análise de seu princípio de funcionamento.
O ABS
O coeficiente de atrito dinâmico (quando as rodas deslizam) é menor do que o coeficiente de atrito estático (quando as rodas estão em aderência com o solo).
Isso significa que, numa frenagem, o espaço exigido para a parada é menor quando as rodas não deslizam.
Assim, a freada mais eficiente é aquela em que se aplica a maior força de parada possível a roda, mas sem deixá-la deslizar, conforme mostra a figura 9.

A finalidade do ABS (Anti-Lock Break System) é justamente essa: aplicar o máximo de força de frenagem possível à roda, mas sem deixá-la travar (escorregar).
Para conseguir isso o sistema conta com sensores eletrônicos de rotação nas rodas, um microprocessador central e um modulador hidráulico.
Esse modulador consiste num conjunto de válvulas que, quando os sensores detectam o tratamento da roda, enviando o sinal ao microprocessador, eles recebem instruções que "aliviam" a pressão do fluido de modo a liberar a roda, conforme mostra a figura 10.

Evidentemente, a presença do ABS melhora a eficiência dos freios reduzindo a distância de parada. Mais do que isso, quando as rodas travam e o carro desliza, a dirigibilidade é perdida.
O processador do ABS recebe as informações dos sensores fazendo a sua comparação com o programa que consta de sua memória. Esse dispositivo conta com recursos, para que em caso de falhas, sua ação seja suspensa.
Quando o contacto da ignição é ligada temos uma primeira verificação do ABS caso em que a lâmpada indicadora permanece acesa por 3 a 8 segundos.
Quando o veículo entra em movimento o sistema é novamente testado e em caso de falha é acionado uma lâmpada indicadora. Quando isso ocorre, o veículo não ficará sem freio, pois o modo tradicional será mantido.
TCS (Traction Control System)
No Brasil, o sistema passou a ser utilizado no Vectra em 1996 e atualmente também é encontrado no Fiat Stilo. O controle de tração consiste num sistema em que um processador central monitora a aderência dos pneus.
Esse sistema usa sensores instalados nas todas, que verificam se existe perigo dos pneus girarem em falso. Quando isso ocorre, os freios são acionados momentaneamente, apenas na roda que patina, evitando assim a perda de controle do veículo.
Para detectar se a roda gira em falso, o processador compara a partir dos sinais dos sensores a velocidade das rodas dianteiras com as rodas traseiras.
O sistema também envia sinais para o sistema de injeção de tal forma que, em caso de derrapagem, é enviado um comando para que o motor tenha seu giro reduzido, com o que pode ser evitada a derrapagem.
ESP (Electronic Stabillity Program)
Um outro sistema interessante que equipa alguns veículos é o programa eletrônico de estabilidade. Sua finalidade é corrigir eventuais falhas de pilotagem, evitando que o veículo derrape mantendo uma trajetória segura.
Trata-se de um sistema que reúne num único módulo as funções ABS, TCS e EBD (Electronic Brake Force Distribution - Distribuição Eletrônica de Força de Frenagem).
Esse último sistema, EBD, calcula a pressão máxima do freio que pode ser aplicada sem o perigo de travamento do eixo traseiro, tendo por base as variações da carga no veículo.
Nesse sistema, existem diversos sensores sofisticados. Nas rodas existem sensores de velocidade que informam se há perigo de travamento ou giro em falso.
No centro do veículo existe um sensor de aceleração lateral e de sua rotação em torno do seu próprio eixo vertical (YAW) e além disso um sensor no volante que indica a intenção de manobra do motorista. A imagem da Bosh mostrada na figura 11 dá uma idéia dos elementos desse sistema.
O sistema compara as diversas informações enviadas pelos sensores e em sua função atua no sentido de mudar o torque ou ainda aplicar o freio em uma ou mais rodas de modo a estabilizar o veículo em caso de perda de controle por derrapagem.
Airbag
Eis um outro dispositivo complementar de segurança importante nos veículos atuais.
Esse dispositivo, aliado ao cinto de segurança, protege o motorista e eventual passageiro contra os efeitos de um impacto frontal no veículo.
O sistema não é ativado em caso de impactos laterais ou traseiros ou ainda em caso de capotamento. Na figura 12 mostramos que o ativamento do ABS ocorre somente se o impacto ocorrer dentro de um ângulo máximo de 30 graus em relação ao movimento frontal.

Os sensores que determinam o instante do disparo de um air-bag são incorporados à unidade de comando do sistema.
Em carros como a Plazer e a S10, os sensores frontais estão localizados na parte inferior do painel do frontal existindo ainda um sensor central na travessa central do chassi.
O princípio de funcionamento do sistema é simples de se entender:
A bolsa contém um gás gerador químico em estado sólido. Esses gases ficam armazenados numa câmara de metal dentro do módulo do Air-bag. As bolsas são lacradas.
Quando a unidade de comando recebe o sinal de impacto do veículo, uma corrente elétrica é aplicada à bolsa provocando a ignição do gás gerador.
Essa gás queima-se rapidamente na câmara de metal fazendo com que seja produzida uma certa quantidade de nitrogênio e dióxido de carbono que se expandem enchendo a bolsa.
O processo de expansão do gás e enchimento da bolsa faz com que a cobertura da tampa de acabamento se rompa.
Pré-Tensionadores
Um recurso de segurança encontrado em alguns carros modernos é o pré-tensionador.
Ele consiste num sistema acoplado ao cinto de segurança dianteiro cuja finalidade é eliminar a folga do cinto no momento de uma colisão, prendendo assim a pessoa firmemente ao banco, conforme mostra a figura 13.

Esse sistema conta com um limitador de força para não apertar demais a pessoa no banco.
Climatização
A finalidade desse sistema é manter agradável o ambiente dentro do carro, independentemente das condições externas.
Esse sistema conta com um comando eletrônico que recebe e monitora informações vindas de diversos sensores, conforme mostra a figura 14.

O circuito conta com um microprocessador em que existe um programa que determina as ações que devem ser tomadas para manter o ambiente dentro das condições desejadas.
O monitoramento da temperatura externa e interna é feito por sensores, localizados em pontos apropriados do veículo internamente e externamente.
Normalmente, para a temperatura externa são usados dois sensores que tomam medidas em dois pontos diferentes. A unidade de comando considera a temperatura mais baixa (normalmente a do ar de entrada).
Em caso de falha dos sensores, o dispositivo assume uma temperatura fixa pré-determinada para as ações a serem realizadas, normalmente de 10º C.
Conforto e Conveniência
Esse sistema controla o acionamento elétricos dos vidros, as travas, além do alarme. Normalmente ele inclui recursos para o uso do controle remoto.
Na figura 15 temos a disposição dos elementos que formam esse setor de controle do automóvel.

São as seguintes as funções controladas:
* Travamento central e diferenciado das portas
* Bloqueio e desbloqueio do veículo
* Acionamento elétrico dos vidros
* Monitoramento do movimento dos vidros (sistema anti-esmagamento)
* Abertura do porta-malas por controle remoto
Além disso, é possível a personalização do sistema com o acréscimo de algumas funções programadas como:
* Travamento automático das portas com o veículo em movimento
* Destravamento das portas ao remover a chave do contacto
* Inibir o sinal sonoro ou luminoso ao desativar o sistema de alarme.
Em veículos como o Pólo, Golf e Passat existe uma unidade eletrônica em cada porta, além da unidade central.
Unidade de Instrumentação Combinada
Essa unidade tem por finalidade avisar o condutor do veículo sobre qualquer anormalidade que ocorra nos sistema além de dar informações importantes sobre o veículo tais como velocidade, rotação do motor, distância percorrida, etc.
O dispositivo denominado Instrumento Combinado é ligado a rede CAN-Bus de dados em alguns veículos, o que permite a realização de diagnósticos através de um scanner.
Se a unidade precisar ser substituída é possível registrar na nova unidade a quilometragem original. Da mesma forma, revisões e trocas de óleo podem ser programadas de modo a serem indicadas no painel.
Essa unidade controla as seguintes funções:
* Velocímetro
* Tacômetro
* Combustível
* Temperatura do motor
* Luzes de controle
* Odômetro e relógio
Sensores Especiais
Diversos tipos de sensores podem ser encontrados em alguns veículos. Esses sensores fornecem indicações sobre determinadas grandezas físicas havendo então uma ação no sentido de se obter maior segurança ou conforto.
Vejamos alguns desses sensores:
a) Sensor de Chuva
Alguns veículos nacionais como o Peugeot 206 Techno, Golf e Fiat Stilo possuem um sensor que faz o acionamento automático do limpador de pára-brisas quando começa a chover.
Diferentemente dos tipos antigos que se baseavam na condutividade de um sensor em presença da água, os tipos modernos se baseiam na refração da luz através do vidro, a qual muda quando em presença da água, conforme mostra a figura 16.

Temos então um LED e um sensor que recebe a luz quando o índice de refração do vidro molhado aumenta, conforme mostra a mesma figura.
Esse sensor é localizado na haste de fixação do espelho retrovisor interno, juntamente com outro tipo de sensor que é o sensor crepuscular (quando existir).
b) Sensor Crepuscular
Encontrado nos mesmos veículos que o sensor de chuva, esse sensor detecta a luminosidade do ambiente através do qual o veículo transita.
Em função do nível de luz sensoriado, o dispositivo atua no sentido de controlar os faróis e luzes de posicionamento.
Esse sensor nada mais do que um LDR comum sendo também localizado na haste de fixação do espelho retrovisor.
c) Sensor de Estacionamento
Esse sensor é encontrado em alguns veículos nacionais como o Stilo da Fiat, consistindo num dispositivo que informa a proximidade de obstáculos quando a marcha-à-ré é engatada, conforme mostra a figura 17.

O sistema opera como um sonar, emitindo ultrassons que são refletidos no obstáculo que devem ser detectados.
A freqüência de operação está em torno de 30 KHz sendo enviados pulsos com um ciclo ativo da ordem de 50%.
São usados quatro sensores localizados no pára-choque traseiro, conectados a uma central que processa seus sinais. Essa central é interligada com outros elementos do circuito através de rede B-CAN.
Quando o pára-choques detecta um obstáculo, ele passa a emitir um tom intermitente constante. Quando a distância cai abaixo de 25 cm, o som tem sua freqüência aumentada tornando-se mais agudo e constante.
Afastando-se do obstáculo a emissão de som para depois de 3 segundos de desengatada a marcha-à-ré.
Em caso de falha o sistema é automaticamente até que um diagnóstico revele qual foi a causa.
Conclusão
O que vimos neste artigo dá uma breve idéia de como pode ser complexa a eletrônica do automóvel em nossos dias, exigindo assim um preparo especial do profissional.
Além do conhecimento específico do princípio de funcionamento dos sistemas, que podem apresentar variações segundo os modelos dos veículos, o profissional precisa contar com instrumentos específicos (scanners) para o diagnóstico.
Em artigos específicos não só os sistemas são analisados como os casos encontrados nas diversas marcas de veículos nacionais.