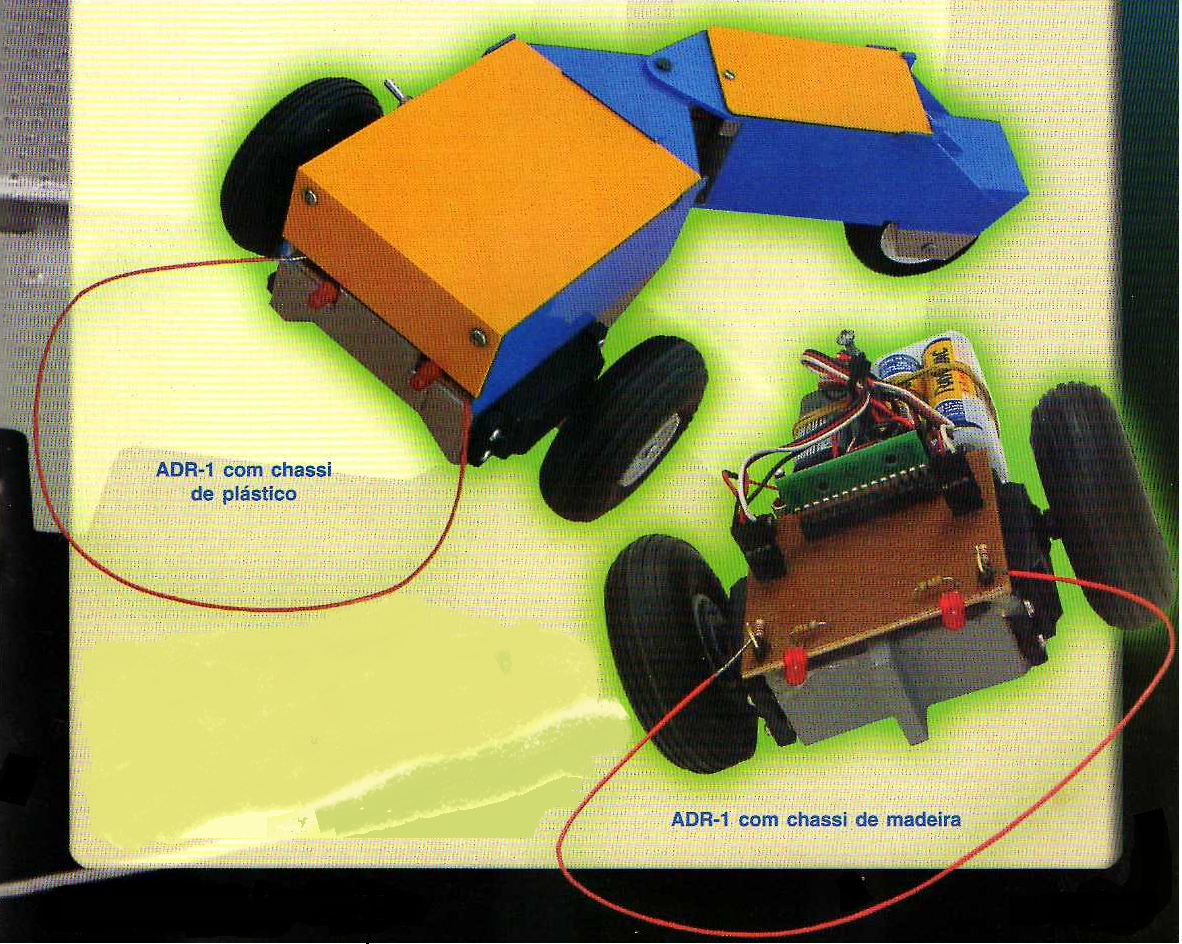
O ADR-1 (ou "Andarilho-1") é um robô muito simples, de fácil construção e programação. E seu custo é bem acessível. Basicamente, o robô move-se em uma direção fixa (para a frente) e, ao encontrar (tocar) um obstáculo, desvia-se. Para isso, ele utiliza "sensores", chaves que ao serem pressionadas "informam" sobre a posição do obstáculo ao "cérebro". Este, então, prepara o desvio com um leve retorno, apontando na direção contrária ao toque. Após esse movimento, o ADR-1 continua sua "jornada" sempre em frente até encontrar outro obstáculo. Abaixo mostramos duas versões do robô.
Nota: O artigo saiu na revista Mecatrônica Fácil de julho de 2002 , o código-fonte placas e mais detalhes da montagem, você encontrará neste link - http://www.arnerobotics.com.br/eletronica/robotica/adr1.htm
O CÉREBRO
O "cérebro" do ADR-1 é responsável pelo controle dos motores (servos de rotação), sensores (chaves de toque) e leds (sinalizadores luminosos). Ele poderá ser um Basic Stamp I Parallax (figura 1) ou Basic Step I Tato (figura 2).
Esses pequenos notáveis são "microcontroladores" programáveis na linguagem BASIC e não necessitam de nenhum gravador especial, apenas de um PC e um cabo. Possuem oito linhas de I/O que podem ser configuradas como entrada ou saída. O seu "set" de instruções é muito bom, incluindo funções para as mais diversas aplicações de seus pinos de I/O. E o que é melhor, você poderá usar esse microcontrolador em vários projetos, pois seu programa é guardado em EEPROM, o que permite que um outro programa (aplicação) seja inserido no lugar do anterior.
Para obter gratuitamente o programa compilador e informações sobre cabos e outros, verifique o site dos fabricantes: Basic Stamp http:// www.parallaxinc.com, ou Basic Step http:// www.tato.ind.br. A revista Saber Eletrônica publicou um pequeno curso sobre o Basic Stamp e atualmente a revista Mecatrônica Fácil, a partir do n° 3, iniciou uma série muito interessante sobre o Basic Step de autoria de Octávio Nogueira.
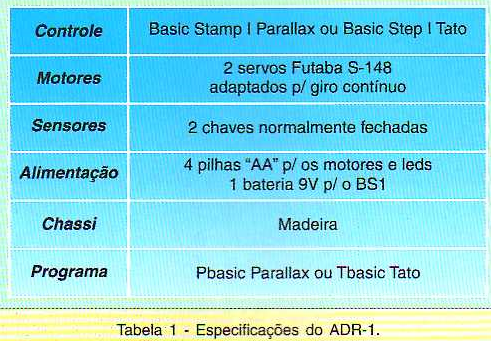
O Basic Step é nacional e fabricado pela Tato Ind. (http://www.tato.ind.br), e tem um excelente custo. Podemos contar agora com um bom microcontrolador para futuros projetos. Na Tabela 1 temos as especificações do ADR-1.
CIRCUITO DO ADR-1
Na figura 3 temos o circuito elétrico do ADR-1. Podemos notar que a presença do BS1 simplificou muito o circuito. As portas de I/O "P1" e "P2" são usadas para controlar os leds. As portas "P3" e "P4" são utilizadas no controle das chaves. Note que existe também um resistor de 10 KS-2 ligado ao "negativo" da bateria e cada chave. Estes resistores são chamados de "pull-down" e formam um divisor de tensão para a porta do BS1. As portas "P6" e "P7" controlam os servos (motores).
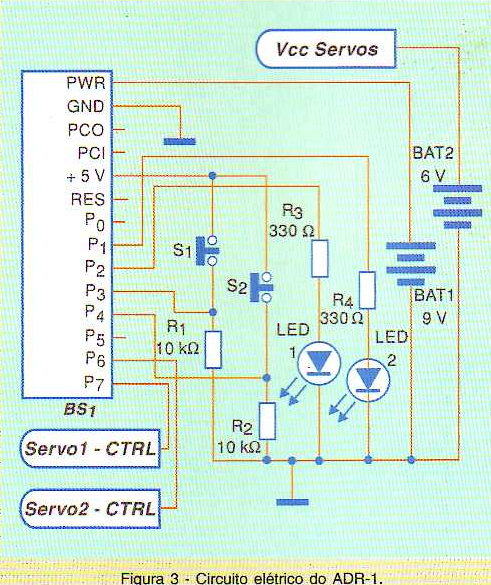
Na edição n°3 de Mecatrônica Fácil, pode-se encontrar uma excelente matéria sobre o funcionamento dos servos, escrita por Newton C. Braga. As portas "P0" e "P5" estão livres e poderão ser utilizadas para implementação de um outro sensor ou saída, de acordo com a necessidade e criatividade de cada um.
PLACA LÓGICA
A placa utilizada na montagem é do tipo universal. Essa placa pode ser encontrada facilmente em lojas de componentes eletrônicos. Seu uso já foi comentado em edições anteriores de Mecatrônica Fácil na série "Linguagem LOGO para Robótica e Automação", de Luiz Henrique Corrêa Bernardes. Para os que não sabem soldar, a matéria "Como Soldar" de Newton C. Braga.
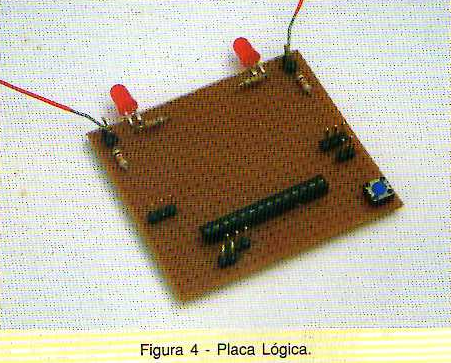
A placa lógica (figura 4) conterá o BS1 e demais componentes. Para evitar soldar o BS1 na placa, o que não é recomendável, utilizaremos um suporte de Cls de 28 pinos aproveitando apenas um dos seus lados.
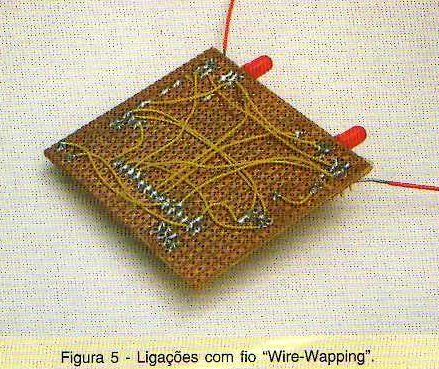
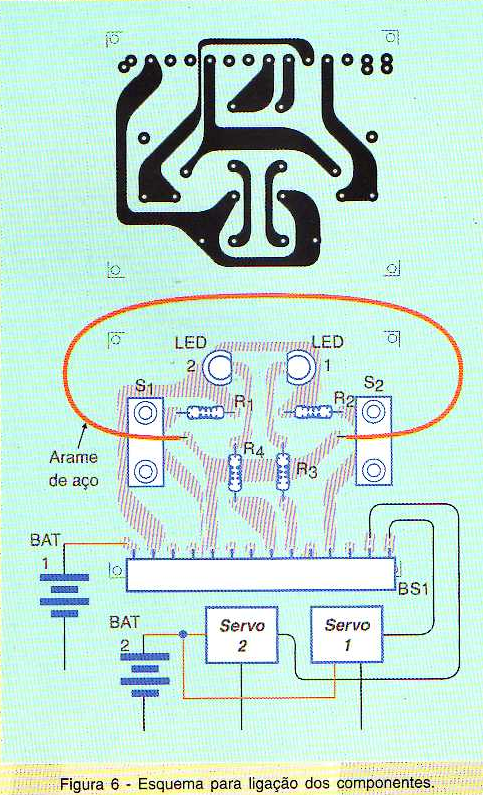
As ligações dos componentes na placa devem ser feitas de acordo com o circuito elétrico empregando fio fino tipo "Wire Wapping" por baixo da placa e soldando ponto-a-ponto (figura 5). As ligações são mínimas e esse tipo de conexão é o mais indicado. O esquema de ligação dos componentes pode ser visto na figura 6.
SENSORES
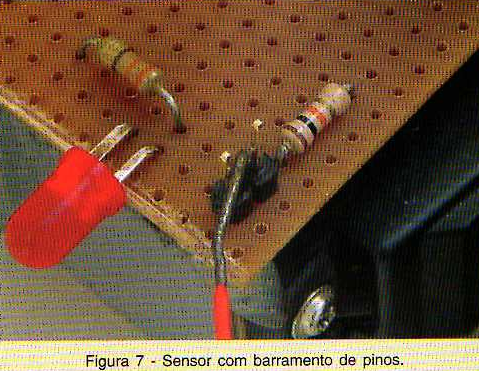
Na figura 7 mostramos os sensores (chaves), que foram montados com barramento tipo "pinos" e arame de aço fino (2 mm de espessura). O arame tem suas pontas soldadas na placa e ao pino VDD (+5 VDC) do BS1. Na disposição adotada, o arame assumiu a forma de um "arco". Cada barramento deve ser ligado aos pi-nos "P4" e "P5" do BS1, conforme descrito no circuito. Note que o arame deverá encostar em um dos pinos do barramento, formando assim uma chave "normalmente fechada". Não podemos esquecer de ligar os resistores de 10 l(S2 aos pinos "P4" e "P5" do BS1 e ao pino "GND" do mesmo (veja esquema de ligação na figura 7). O leitor também poderá, se preferir, usar chaves do tipo "push-button" normalmente fechadas, facilmente encontradas no comércio especializado. Nesse caso, o arame em forma de arco deverá ser preso às chaves de maneira que ao ser tocado acione as mesmas.
LEDs
Os leds utilizados são do tipo comum vermelho, mas se o leitor desejar poderá empregar qualquer outro modelo. Eles foram dispostos na parte frontal da placa e ligados aos pinos "P1" e "P2" do BS1.
CHASSI
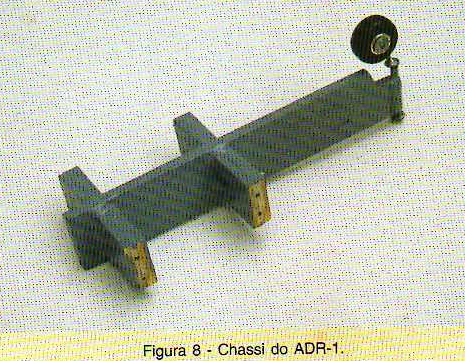
O chassi adotado pelo autor foi desenvolvido em madeira e pintado com tinta plástica cinza, permitindo um bom acabamento. Ele pode ser visto na figura 8. Porém, para muitos a madeira pode parecer inadequada para este tipo de trabalho e, nesse caso, alternativas como: acrílico, plástico, cobre, zinco, peças de LEGO ou MECANO ou muitas outras poderão ser usadas.
Uma outra solução barata e simples é o uso de caixas comerciais plásticas ou em alumínio, facilmente encontradas no comércio especializado. Lembramos que na Mecatrônica Fácil n°2, n°3 e n°4 o leitor poderá acompanhar a série -Trabalhando com Plásticos", de José Francci Junior.
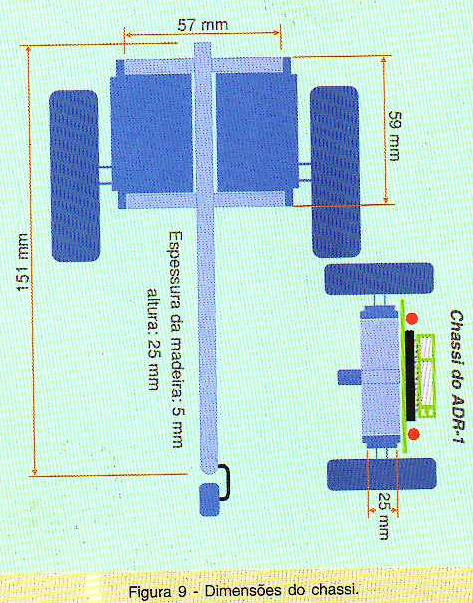
A forma do chassi do ADR-1 pode ter inúmeras variações, tudo dependerá do material adotado para tal. Acreditamos que cada leitor vá seguir um caminho e, com isso, criará seu "próprio" ADR-1. As medidas e forma do chassi adotado pelo autor podem ser vistas na figura 9.
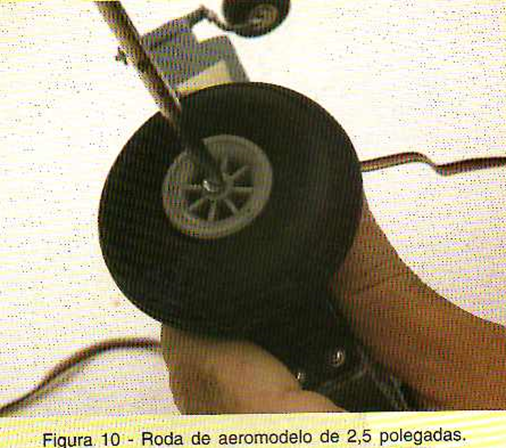
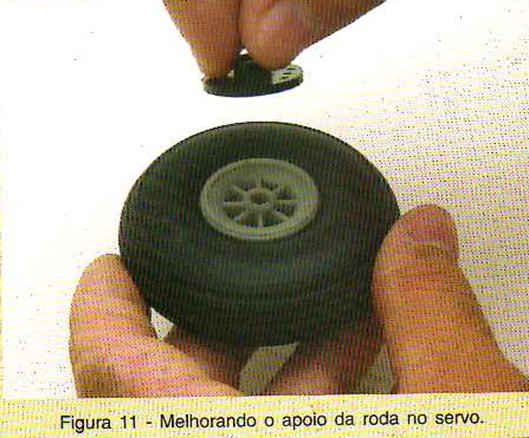
As rodas utilizadas são de aeromodelos e seu tamanho pode variar de "1,5" a "3" polegadas, dependendo do "terreno" em que o ADR-1 deverá "andar". Para sua fixação utilizamos um parafuso longo com o mesmo "passo" do fornecido com o servo (figura 10). Para melhorar o apoio do servo na roda, pode-se colocar um "disco" para servo conforme figura 11.
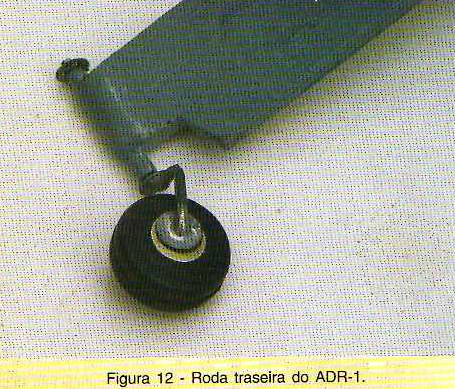
A roda traseira de apoio pode ser fixa ou móvel (figura 12). Utilizamos uma roda "traseira" para aeromodelo pequeno. Sua fixação pode ser feita com arame de aço, madeira ou qualquer outro material que o leitor tenha disponível.
ADAPTAÇÃO DOS SERVOS
No mercado, é possível encontrar servos de giro contínuo prontos e que não necessitam de qualquer adaptação. Os mesmos já foram apresentados nesta revista, edição n°1, no projeto OCTA-1. Porém, se o leitor dispõe de servos para aeromodelos, poderá utilizá-los. Para isso deverá realizar pequenas adaptações para o giro contínuo. Para os que desejarem tentar esta opção, descrevemos os passos:
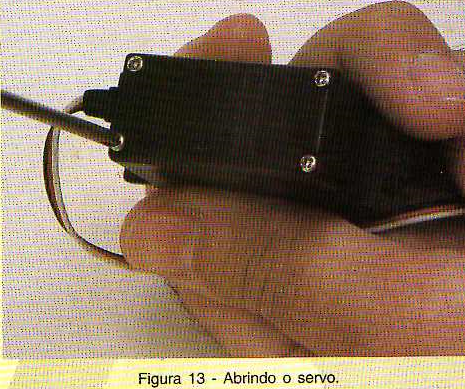
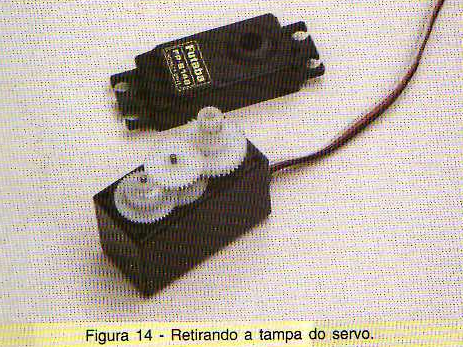
1 — Abra o servo retirando os parafusos (figura 13) e a tampa superior (figura 14).
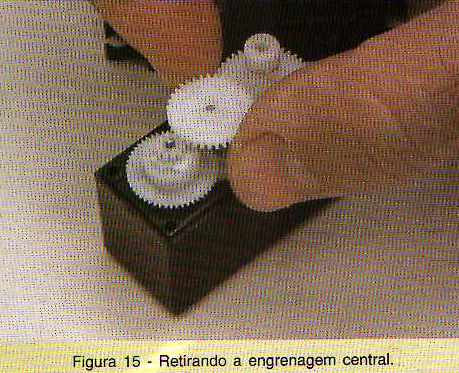
2 — Retire a engrenagem central do servo (figura 15).
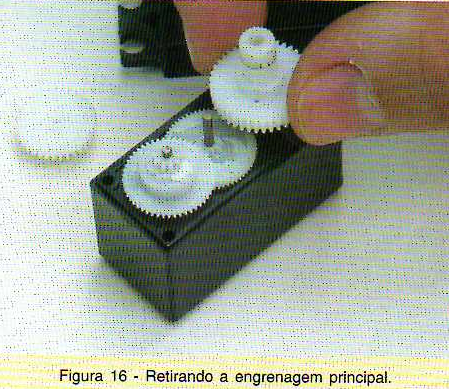
3 — Retire a engrenagem principal (figura 16).
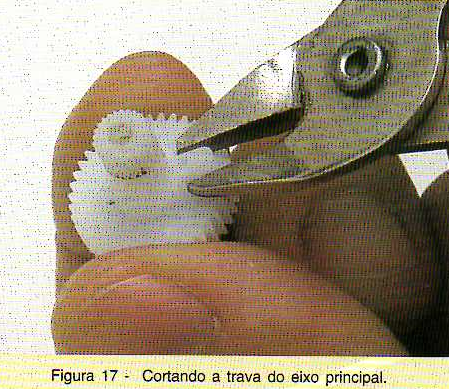
4 — Com o uso de um alicate, retire (corte) a trava do eixo principal (figura 17).
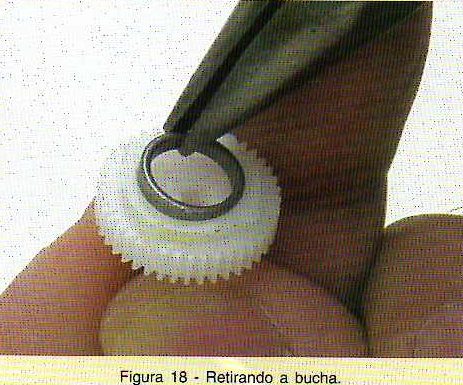
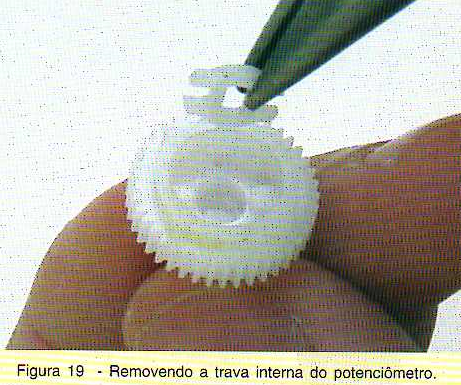
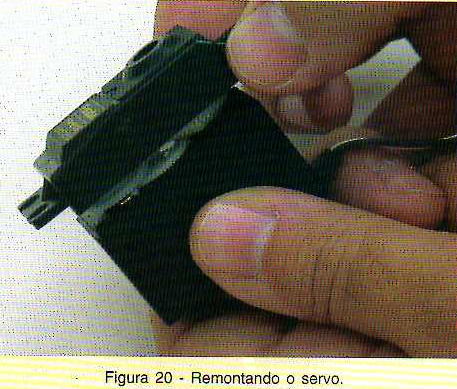
5 — Remova o anel metálico ou bucha (figura 18). Retire do interior do eixo principal do servo a trava plástica interna do potenciômetro (figura 19). Não esqueça de repor esse anel após a retirada da trava. 6 — Remonte o servo, tomando cuidado para que eixos e engrenagens se encaixem novamente (figura 20).
Pronto, você tem agora um servo para giro contínuo.
Obs.: Para restabelecer o servo em sua condição inicial, você deverá adquirir em lojas de aeromodelismo um kit de engrenagens para o modelo do servo alterado.
MONTAGEM FINAL, PROGRAMAÇÃO E TESTES.
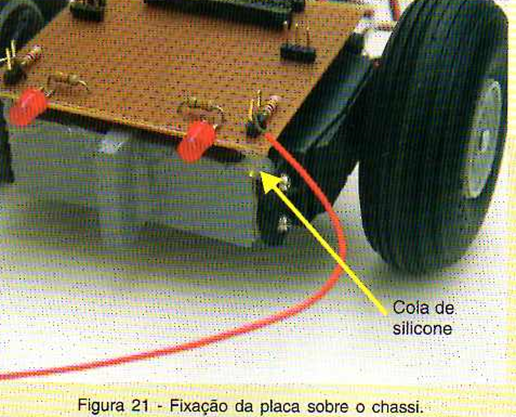
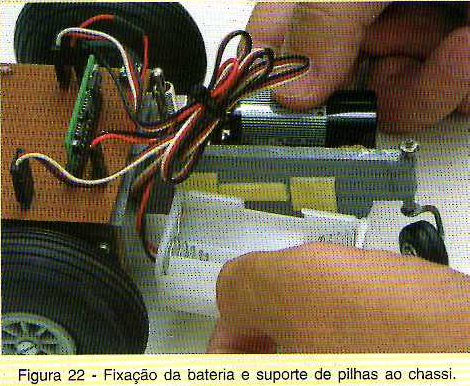
A placa lógica pode ser instalada sobre o chassi com auxílio de "cola quente", fita dupla face, elásticos ou outros (figura 21). Ela deve ser fixada à frente para que os sensores possam atuar com eficácia. Lembre-se que a altura dos sensores deve ser disposta de tal forma que sua atuação seja a melhor possível em relação ao "ambiente" e seus obstáculos. A bateria e o suporte de pilhas também podem ser instalados utilizando os mesmos recursos. Fixe-os de maneira que o conjunto obtenha o melhor equilíbrio (figura 22).
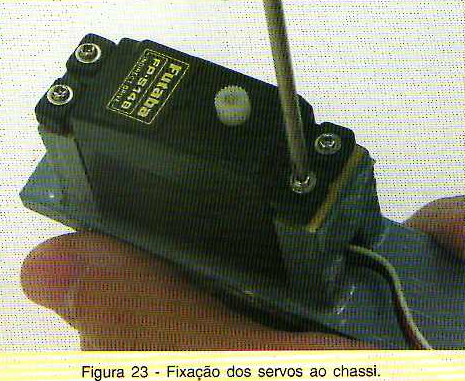
A fixação dos servos dependerá do chassi adotado e parafusos, cola quente ou outros poderão ser empregados para esta tarefa (figura 23).
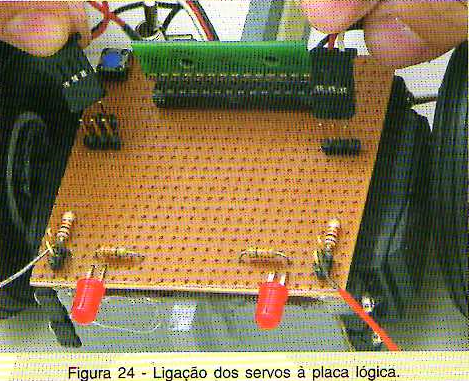
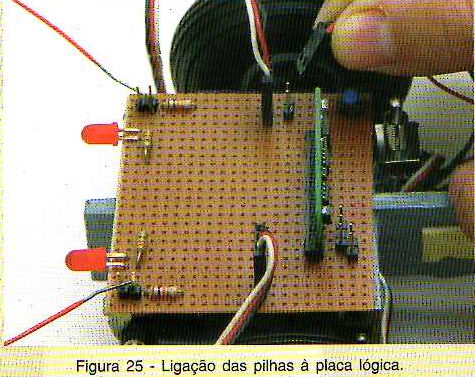
Os servos são ligados à placa lógica através de barramento tipo "pinos" na placa (figura 24). Os fios de controle devem ser ligados aos pinos "P6" e "P7" do BS1. Notem que a alimentação dos servos é feita independentemente por quatro pilhas pequenas "AA" (6 VDC), ligadas à placa lógica através de barramento tipo "pinos" (figura 25). A alimentação do BS1 é feita por uma bateria de 9 V, que também é ligada à placa através de barramento tipo "pinos" (figura 26). É importante ligar os pontos negativos da bateria, pilhas e BS1 juntos.

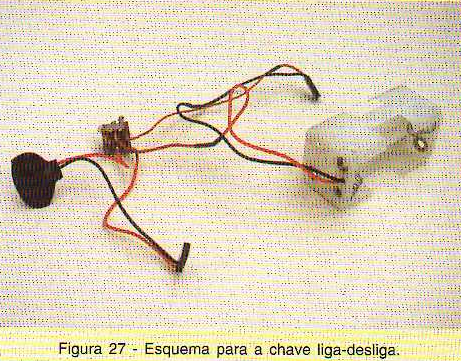
Uma chave tipo "H-H" pode ser usada para ligar e desligar o robô, sem a necessidade de desconectar a bateria e pilhas da placa. O esquema dessa ligação pode ser visto na figura 27.
Insira o BS1 no suporte (figura 28) e programe-o utilizando o compilador e cabo adequados: Pbasic Parallax para o Stamp I ou Tbasic para o Step I.
Os compiladores podem ser obtidos no site dos seus respectivos fabricantes, gratuitamente: http:// www.parallaxinc.com e http://www.tato.ind.br .
Ao ligar o ADR-1, ele deverá mover-se à frente. Se o movimento for no sentido contrário ou o seu robô entrar em giro, arranje os servos no chassi corretamente para que ambos girem em uma única direção. Verifique a atuação das chaves; caso a operação pareça invertida, troque os servos de posição (esquerda/direita).
Caso um dos servos apresente maior velocidade que o outro, o leitor notará um leve desvio para o lado contrário a este. Se isso ocorrer, compense esse desvio com a seguinte rotina no programa:
'Compensação do movimento para direita
for i=1 to 2
pulsout sdir,d1
pause 20
next i
Essa compensação é feita para a direita. Ou seja, o servo esquerdo é mais rápido que o direito. Se a compensação exigida for à esquerda (servo direito mais rápido que o esquerdo) use a seguinte rotina:
'Compensação do movimento para esquerda
for i=1 to 2
pulsout sesq,d2
pause 20
next i
O leitor poderá aumentar ou diminuir essa compensação 'no comando “for” aumentando ou diminuindo o valor final do contador (2). A rotina já está inclusa no programa, para indicar o local adequado da inserção.
CONCLUSÃO
O ADR-1 é um robô simples, que poderá ser encarado por muitos leitores como "Meu primeiro robô". Muitas podem ser as adaptações e melhorias no ADR-1. Espero que tenham apreciado este artigo.