Os insetos sempre despertaram algum tipo de reação nos seres humanos: curiosidade, medo, repulsa etc. O fato é que estes "pequenos" seres são objetos de estudos por parte de muitos biólogos e também por "cientistas mecatrônicos". Estes últimos pesquisam principalmente sua locomoção, e sua maneira de reconhecer o ambiente (sensores), entre outras. O robô que propomos neste artigo é relativamente simples de ser construído e poderá ajudar o leitor a compreender melhor os meios de locomoção sem "rodas" possíveis na Robótica.
O Circuito do "Robô Inseto" pode ser visto na figura 1. Como o leitor pode notar, utilizamos o já conhecido microcontrolador Basic Step I, da Tato Equipamentos Eletrônicos (www.tato.ind.br), e que também é alvo de uma série de artigos nesta Revista.
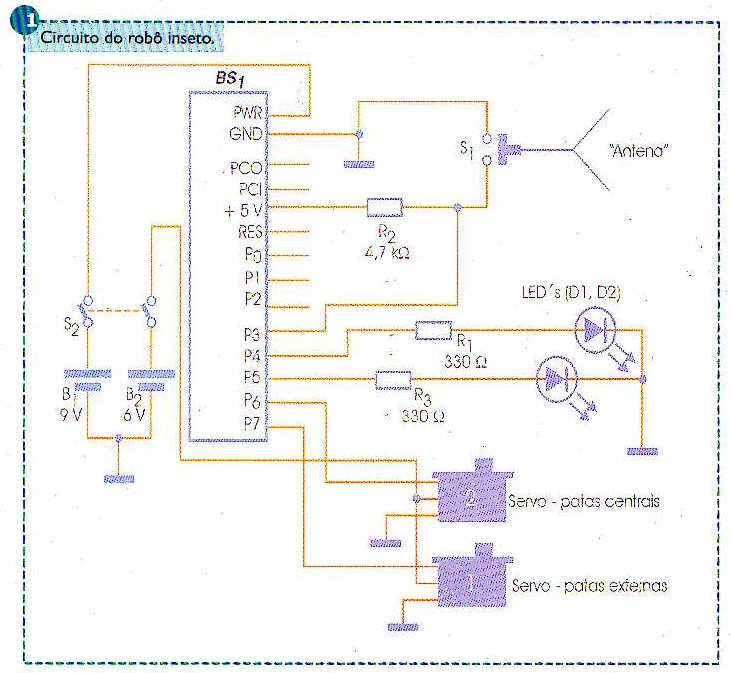
O Basic Step I realiza todo o processamento, controlando dois servos comuns para aeromodelos, uma chave "antena" (sensor) e os dois LEDs (complementos visuais). Um dos servos controla as patas "externas"e o outro servo controla as patas "centrais". A antena serve como sensor de contato e permite que o "Robô Inseto" reconheça os obstáculos e desvie deles. Na figura 2, o leitor poderá entender melhor como o robô inseto "anda".
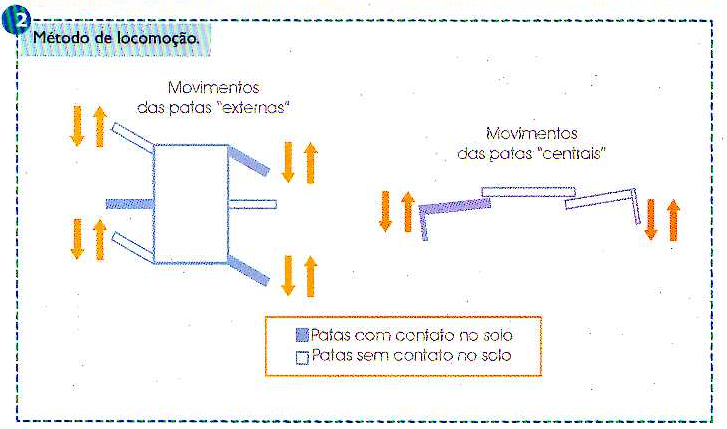
Analisando essa figura, o leitor percebe que o servo "2" atua levantando um dos lados do robô inseto (patas centrais). Isso faz com que duas patas "externas" fiquem em contato com o solo e outras duas não. As duas patas em contato com o solo são controladas pelo servo " I " (patas externas), que faz com que as mesmas se movam para frente e para trás.
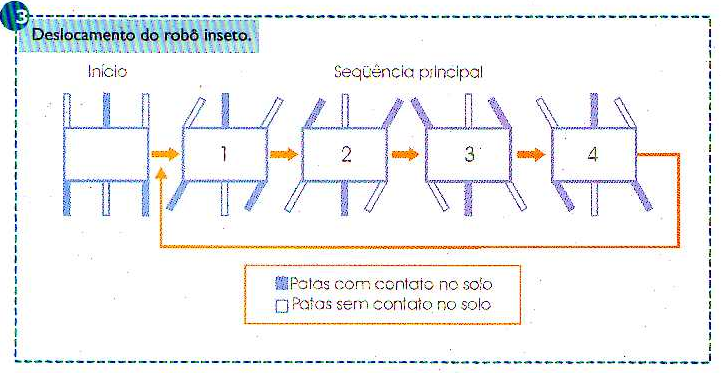
A figura 3 demonstra a sequência de movimentos do Robô inseto. Levantando um dos lados (movimentos 1 e 2) e movendo as patas "externas", e depois levantando o outro lado e movendo novamente as patas "externas" (movimentos 3 e 4), temos o movimento para a frente. Invertendo esta sequência, temos o movimento contrário (para trás).
Quando o robô "detecta" um obstáculo através de sua antena sensora, ele prepara o desvio. Primeiro ele realiza 4 passos para trás e depois desvia para o lado esquerdo. Porém, é necessário falar um pouco mais sobre o desvio para que o leitor possa compreender melhor como ele é feito. Acompanhe a figura 4.
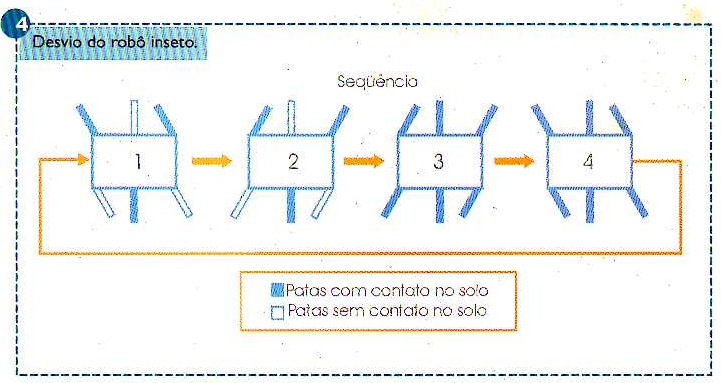
Em alguns modelos de robôs insetos com um número maior de servos, o desvio se torna uma tarefa mais fácil. No caso do robô proposto, o desvio é um pouco mais complexo. Primeiro, o robô precisa ser "elevado" em um de seus lados. Depois ele precisa ser movido para trás (movimentos 1 e 2). Após este movimento, o robô terá uma pequena inclinação para o lado. Então, centralizamos as pernas de elevação e movimentamos as patas "externas" novamente para o lado contrário (movimentos 3 e 4). Neste momento o robô patina, pois todas as patas estão em contato com o solo. Novamente a operação é executada até que o movimento seja suficiente para o desvio.
MONTAGEM
Dividimos a montagem do nosso robô inseto em duas partes: parte eletrônica e parte mecânica. Utilizaremos ferramentas como ferro-de-solda, furadeira, estiletes etc. Caso o leitor não possua experiência com algumas das ferramentas a serem empregadas, é recomendável pedir ajuda a alguém mais experiente. Evite acidentes!!!
Montagem eletrônica
Para montar a placa que conterá os componentes, o leitor poderá optar pelo uso de uma placa padrão ou utilizar o "layout" abaixo. A placa não permite gravar o Basic Step. Esta operação deve ser feita fora da placa.
O tamanho da placa foi dimensionado para ter exatamente o tamanho da base do robô inseto. Tome muito cuidado ao soldar os LEDs, pois estes componentes são polarizados. Para a montagem do Basic Step, é altamente recomendável o uso de um suporte. Este pode ser construído a partir de um soquete de Cls de 28 pinos, aproveitando somente um de seus lados. Os servos podem ser soldados diretamente na placa, porém o uso de terminais tipo "barra de pinos" evitará cortar os terminais dos mesmos.
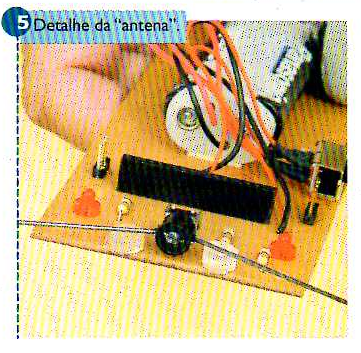
A chave "antena" foi montada a partir de um mini "push-button" e um pedaço de arame de aço de 34 cm de comprimento com 2 mm de espessura. Para segurar o arame utilizamos um pedaço de plástico com um furo no meio colada ao ponto móvel do botão (chave). Também empregamos dois pequenos pedaços de "cola quente", cortadas com estilete, para dar melhor apoio ao conjunto. Observe a figura 5.
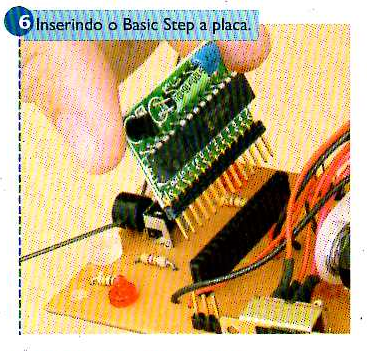
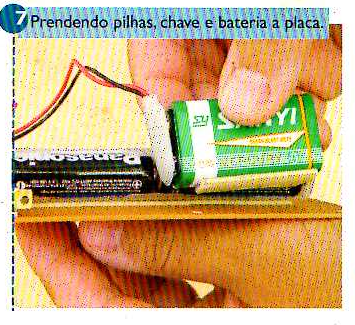
Insira o Basic Step 1 na placa (figura 6). Cuidado para não o colocar invertido!!! Para fixar o suporte de pilhas, chave liga-desliga e a bateria à placa, o leitor poderá utilizar fita dupla face, cola quente, arame ou o material que melhor lhe convier. No nosso protótipo usamos fita dupla face. Veja a figura 7.
Montagem mecânica
Para a montagem mecânica, será preciso alguns retalhos de madeira e parafusos. Na lista de componentes o leitor poderá ver a lista necessária para tal.
A base do robô foi montada em compensado de 4 mm de espessura. As furações são para servos comuns para aeromodelos. O servo "I", que controla as patas "externas", fica a frente, e o servo "2", que controla as patas "centrais", fica atrás. Foram utilizados quatro pequenos pedaços de madeira com 20 mm de comprimento e 5 milímetros quadrados para apoiar os servos e permitir que os mesmos ficassem na altura correta de operação. Outros quatro pedaços de madeira com 15 mm de comprimento e 5 milímetros quadrados foram usados para construção do suporte das patas centrais. Todas as furações na base possuem 1/8 de polegada de diâmetro. Para a colagem das peças empregue, preferencialmente, cola tipo epóxi para uma melhor resistência mecânica. Na falta deste tipo de cola, a cola branca ou o cianocrilato (Super Bonder) podem ser utilizados.
Construção das patas
Precisamos de 4 patas externas e 2 patas centrais. Estas foram feitas em madeira com 3 mm de espessura e 12 mm de largura. Todos os furos nas patas têm 1/8 de polegada de diâmetro, exceto os que deverão ser feitos nas patas centrais para fixação dos arames de controle, que devem ter a espessura do arame a ser utilizado. Aqui também é recomendável o uso da cola tipo epóxi para uma melhor resistência mecânica.
Construção dos elementos de "transmissão"
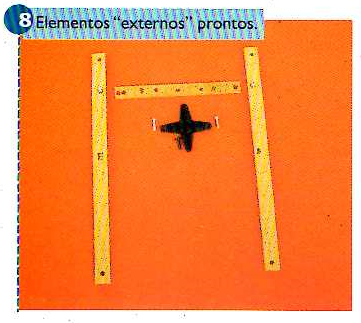
Chamamos de elementos de "transmissão" todos os elementos necessários à transferência dos movimentos dos servos às patas. Foram utilizados dois pedaços de madeira de 175 x 10 x 3 milímetros (comprimento, largura e espessura) para ligar as patas "externas" dianteiras e traseiras e um pedaço de madeira de 93 x 10 x 3 milímetros (comprimento, largura e espessura) para ligar o servo " I " às patas "externas". Este último elemento deverá ser parafusado em um link de servo, geralmente fornecido com o mesmo. Na figura 8 o leitor poderá vê-las prontas.
Para o elemento central foram utilizados: 1 pedaço de madeira com 40 x 10 x 3 milímetros (comprimento, largura e espessura) que também deverá ser parafusado em um link de servo e 2 pedaços de arame de aço com 2 mm de espessura. O leitor poderá substituir os arames por peças de aeromodelos conhecidas como "bali link" e arame de rosca.
Em nosso protótipo, apesar de mostrarmos em nosso esquema o desenho dos dois arames, utilizamos um arame para transmissão do movimento e um conjunto de peças para aeromodelos (2 ball link's e um arame com rosca). Esperamos assim demonstrar o uso de vários tipos de componentes e as várias opções possíveis em uma única montagem. As peças prontas podem ser vistas na figura 9.

Montagem do conjunto
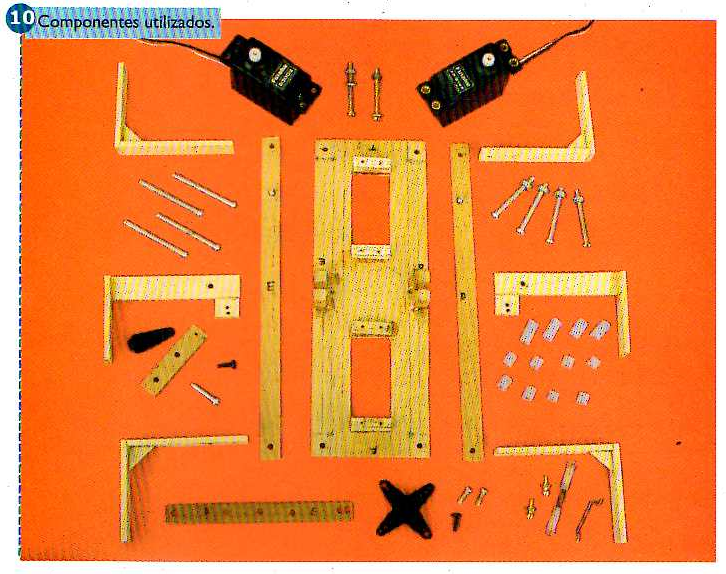
Na figura 10 podemos ver todos os componentes utilizados nesta montagem. Lembramos mais uma vez que na lista de componentes o leitor encontrará a relação de material necessário para esta montagem.
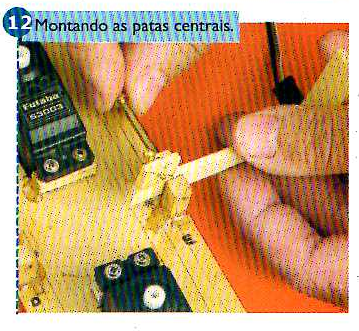
Comece a montagem final parafusando os servos (figura 11). Depois utilize parafusos para prender as pernas centrais. Neste ponto é altamente recomendável o uso de arruelas metálicas entre as patas centrais e o suporte de madeira. Isso ajudará na redução do atrito entre as peças. Veja a figura 12.

Depois, você já poderá prender as patas "externas". Lembre-se de prender primeiro os parafusos que servirão de ponto de apoio para os elementos de controle externos. Estes parafusos são presos com porcas e devem ficar bem apertados. Eles ficam voltados para baixo.
Para montar as pernas à base também utilizaremos parafusos. Porém estes ficarão voltados para cima e serão posteriormente fixados com a ajuda de um pedaço de mangueira de silicone, borracha ou mesmo plástico e servirão também para apoiar a placa de controle (veja a figura 13). O uso de arruelas entre a base e as patas externas também é recomendável para facilitar os movimentos.

A "mangueira" deve ter seu diâmetro interno menor que o diâmetro dos parafusos utilizados para que prendam sob pressão. Ela poderá ser facilmente encontrada em lojas de modelismo, lojas para aquários, farmácias, etc. Estes pedaços de mangueira deverão ter seu comprimento calculado para que permitam também suportar a placa sem que esta encoste nos servos.
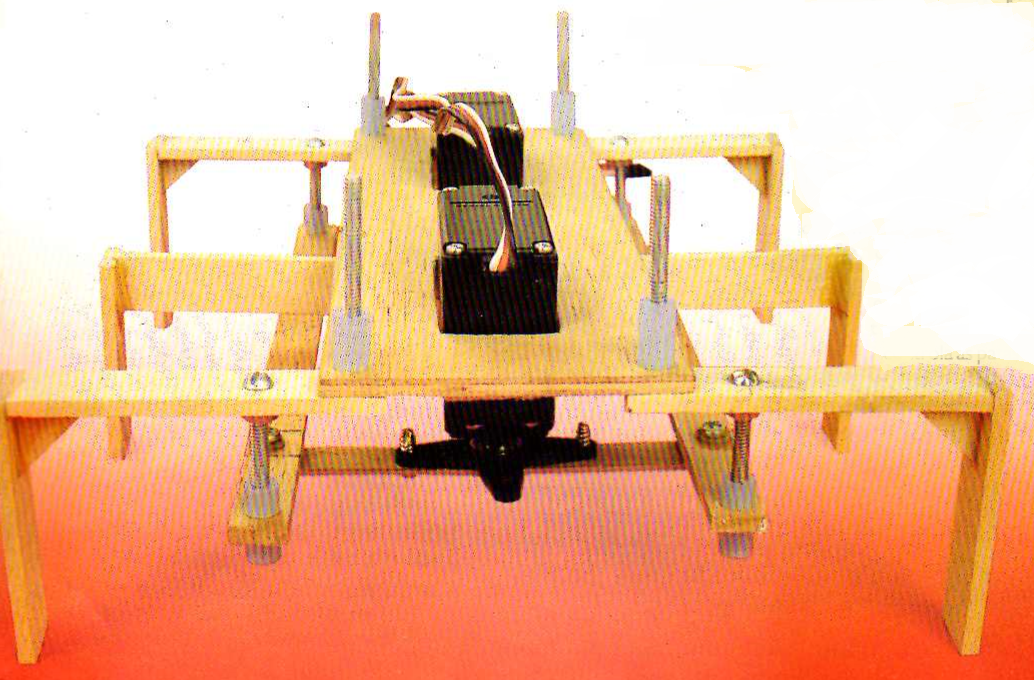
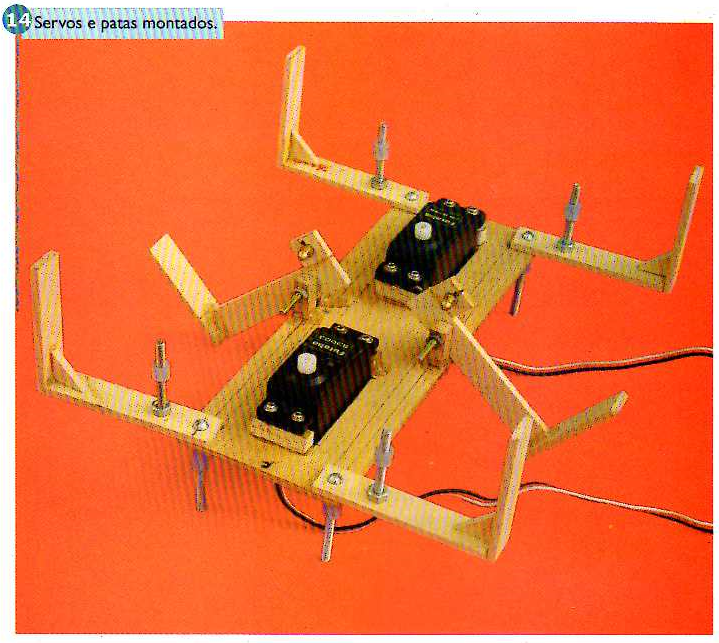
Após a montagem dos servos e patas, nosso robô terá a aparência da figura 14. Agora montaremos as alavancas que unirão as patas "externas": dianteira e traseira, A transferência de movimento é obtida graças a um parafuso que deverá ser preso no furo mais ao centro de cada uma das peças. Para fixar estas partes ao robô, utilizaremos pequenos pedaços de mangueira (já detalhadas), como pode ser visto na figura 15.

Então, montaremos o conjunto de transmissão das patas centrais. O leitor deve ter notado que as patas centrais são unidas entre si por um arame, que pode ser construído, ou por um conjunto formado por 2 "ball link's" e um pedaço de arame com rosca (na verdade apenas o pedaço com rosca). A escolha é do leitor. Na figura 16 o leitor pode verificar a montagem do "arame" de união entre as patas centrais.

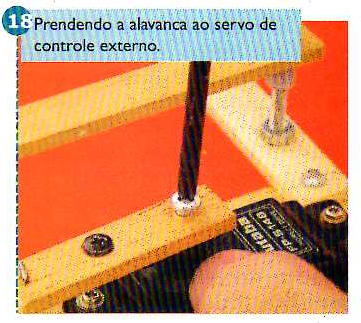
A partir deste momento, precisamos unir os servos de controle às patas através das alavancas de controle e transferência (conjunto de transmissão). Começaremos pelo servo central. Uniremos a alavanca montada para este às patas com um arame que transferirá o movimento a elas, conforme a figura 17. Prenda a alavanca ao servo com um parafuso (figura 18). Na figura 19 o leitor tem um detalhe deste conjunto devidamente montado.


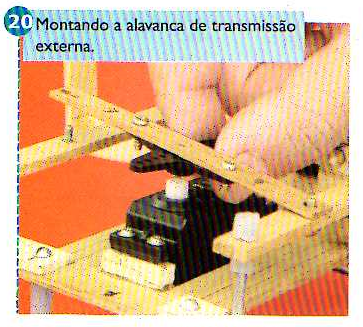
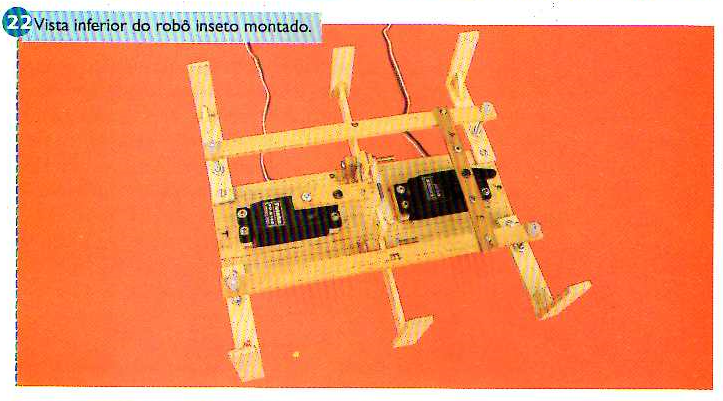
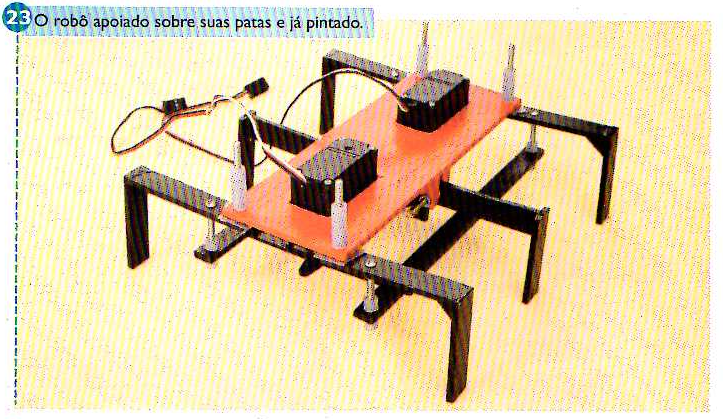
Agora, prenderemos a alavanca de movimento externo às alavancas de transmissão dianteira e traseira (figura 20). Prenda a alavanca ao servo com um parafuso (figura 21). Na figura 22 o leitor tem uma vista da parte inferior do conjunto devidamente montado e na figura 23 temos o robô apoiado em suas "patas" devidamente pintado.

É importante para o sucesso desta montagem que os parafusos e mangueiras utilizadas não façam pressão demasiada sobre as patas. Assim, evitamos que os servos sejam sobrecarregados demais durante sua operação. Tenha em mente que é necessário que as peças fiquem firmes, mas não exerçam pressão entre as mesmas.
União da parte mecânica e eletrônica
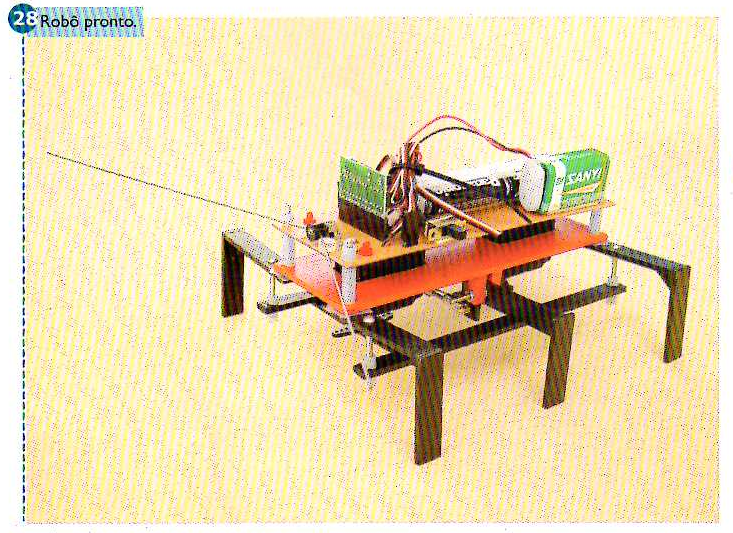
Podemos agora unir as partes mecânica e eletrônica. Para isso, precisamos ligar os servos à placa, conforme a figura 24. Depois disso, inserimos a placa de controle ao nosso conjunto mecânico (figura 25), fixando-a com pequenos pedaços de mangueira de silicone (figura 26). Os fios podem ser presos com o uso de uma cinta plástica para um melhor acabamento e para evitar que os mesmos se enrosquem em obstáculos e/ou nas próprias "patas" do robô. Veja as figuras 27 e 28.




TESTE E USO
A placa do Robô Inseto não permite gravar o Basic Step. Esta operação deve ser feita na Placa Step Lab ou em um "pront-o-board", de acordo com o que já é feito pelo leitor no uso de seu Basic Step em sua bancada.
Com nosso robô pronto e montado poderemos agora proceder nossos testes. Programe o Basic Step com o código-fonte I (disponível para download no site da revista) e insira-o novamente na placa. Ligue a chave S2 (as pilhas e bateria devem estar instaladas). Este pequeno programa serve apenas para centralizar os servos. Isso auxiliará no posicionamento correto dos mesmos. As "patas" dos robôs tanto "externas" como centrais devem ficar "centralizadas". As patas "externas" não devem ficar nem à frente nem atrás em nenhum dos lados. Ambas as patas centrais devem ficar apoiadas no chão. Realize todos os ajustes necessários.
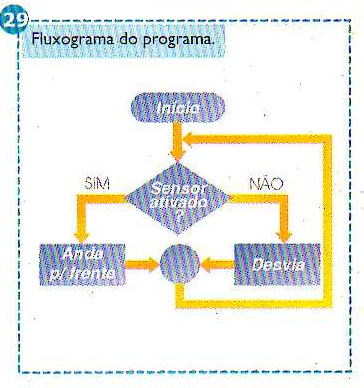
Feitos os ajustes, utilize o código-fonte 2 (também disponível no site da revista) para programar o Basic Step. Este código-fonte contém a programação necessária para o movimento do robô inseto. Ao ligar o robô, o mesmo deverá "andar" para frente. Ao encontrar um obstáculo, ele realizará o desvio, já comentado anteriormente neste artigo. Na figura 29, o leitor tem um fluxograma que permite entender o funcionamento do programa proposto.
É importante salientar que este robô foi desenvolvido para se movimentar em pisos lisos. Não é recomendável o uso do mesmo em pisos rugosos e carpetes. O esforço nos servos e partes mecânicas será excessivo, além do seu deslocamento poder ser impreciso e insatisfatório.
Apesar do autor ter utilizado madeira em seu protótipo, o leitor poderá construir o robô inseto com vários outros tipos de materiais como plástico, acrílico, etc. As medidas propostas podem também sofrer adaptações de acordo com o material a ser empregado. O leitor deve ter em mente apenas que a leveza do conjunto é importante para que seu projeto tenha sucesso. Um bom exemplo do que é possível fazer é a versão em plástico do robô inseto criado por José Francci Jr, presente nesta edição.
CONCLUSÃO
Este pequeno robô certamente irá despertar o interesse e atenção em uma feira de ciências e/ou tecnologia. As demonstrações possíveis são muitas e o uso de outros sensores e acabamentos podem criar "criaturas" diversas e muito interessantes. Tudo é uma questão de imaginação. Boa montagem. !!