









Em artigo anterior descrevemos a montagem de um pequeno robô experimental que consiste numa escova com um motor que caminha pela vibração das cerdas.
Na verdade, versões deste robozinho tem sido vistas em diversos filmes do Youtube, usando desde escovas de dentes e motores do vibracall de celulares até versões maiores como a nossa.
No entanto, constatamos que é possível agregar controle a este robozinho que daminha sem direção e isso pode resultar num interessante projeto para o ensino de tecnologia no nível médio.
Os alunos podem montar o robô, aprendendo o princípio de funcionamento do circuito e depois testar sua habilidade numa competição em que os robôs devem cruzar uma pisca estrita ou ainda uma pisca com obstáculos, controlados por cada competidor.
Como montar o robô escova com controle remoto por lanterna é o que veremos neste artigo.
Obs.: O robô foi montado pelos alunos do Colégio Mater Amabilis de Guarulhos em 2013 pela primeira vez. Veja no link abaixo o filme da competição (link)
A versão que apresentamos utiliza uma lanterna para controlar a direção do movimento do robô.
Com isso o robô pode ser dirigido pelos estudantes e uma competição envolvendo obstáculos ou habilidade pode ser programada.
O circuito é mais complexo que a versão original com apenas um motor, sendo montado pelos alunos do ensino médio que devem soldar os componentes em placa de circuito impresso, ou numa configuração mais simples, numa ponte de terminais.

Como Funciona
A ideia de se fazer uma escova andar é simples.
Inclinamos as cerdas de plástico da escova (Veja modelo usado.), o que é feito pelo mesmo processo descrito no projeto anterior, usando para esta finalidade ar quente.
Esse ar quente pode ser obtido de um aquecedor de cabelos, por exemplo, como mostra a figura 1.

Colocando um pequeno motor elétrico sobre a escova e no seu eixo um peso de modo que ele fique desequilibrado, e ao girar vibre, esta vibração se transfere às cerdas, conforme mostra a figura 2.

Com isso, as vibrações fazem com que as cerdas se movimentem de modo a fornecer a força propulsora do motor.
A escova caminha então na direção determinada pela orientação das cerdas.
Na versão original do Robô Escova, descrita em artigo anterior, não havia controle algum.
O robô simplesmente caminhava, batendo nos obstáculos e mudando de direção de forma totalmente errática.
A ideia de se ter um controle sobre o robô veio do Robô de Combate, que é outro projeto que já descrevemos em artigo e utilizamos com nossos alunos.
Se tivermos dois motores de propulsão, deslocados de modo que a força de um tenda a movimentar o robô numa direção e a força do outro na direção oposta, controlando os motores poderemos dirigir o pequeno Robô Escova, conforme mostra a figura 3.

Assim, se os dois motores forem acionados ao mesmo tempo, o robô caminhará em linha reta para frente.
Acionando o motor do lado direito (B), o motor tenderá para o lado esquerdo e acionando o motor do lado esquerdo (A) o motor tenderá para o lado direito, conforme mostra a figura 4.
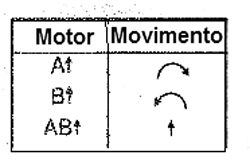
Evidentemente, diferentemente do robô de combate não temos o movimento à ré, pois mesmo com a inversão dos motores, o robô continua se movimentando no sentido determinado pelas cerdas da escova.
O modo de acionamento dos motores que escolhemos também vem de outro projeto nosso: o veículo mecatrônico VM-1 que evoluiu para as versões VM-2 e VM-3.
Usamos então inicialmente dois circuitos de acionamento, um para cada motor, tendo por sensores dois LDRs.
Assim, quando focalizarmos uma lanterna para um dos LDRs o motor correspondente é acionado e o robô vai na direção de comando.
Da mesma forma, quando o outro LDR é iluminado, o motor correspondente é acionado e o robô muda de direção.
Na figura 5 mostramos como usar um circuito de controle de motor com LDR.

Na figura 6 temos o circuito usado para o controle de um motor, fazendo uso de um transistor Darlington de potência.

Estes transistores têm um ganho muito grande, podendo receber o sinal do LDR, mesmo com luz muito fraca, e ainda assim acionar o motor à plena potência.
Nos testes que fizemos com nosso primeiro protótipo, constatamos que o robô responde aos comandos com muita rapidez, o que dificulta o controle pelo controlador que usa a lanterna.
O robô vira então rapidamente de um lado para outro e focalizar a lanterna para o LDR correspondente não é muito fácil, nem mesmo para os alunos acostumados às operações rápidas dos videogames.
Para facilitar o controle, resolvemos adicionar ao circuito um terceiro LDR de modo que, ao ser iluminado, ele acione os dois motores ao mesmo tempo.
Com isso, para fazer o robô avançar em linha reta, não precisamos mais jogar o foco de luz rapidamente entre os dois LDRs laterais, o que não é muito fácil.
Basta iluminar este terceiro LDR centralizado, conforme mostra a figura 7.

Este LDR é conectado aos dois circuitos de controle através de diodos que impedem a interação entre os circuitos.
Desta forma, nosso robô pode ser controlado de forma mais simples:
a) Iluminando o LDR 1 o robô vira para a esquerda
b) Iluminando o LDR 2 o robô vira para a direita
c) Iluminando o LDR 3 o robô avança em linha reta
Montagem
a) Parte Eletrônica
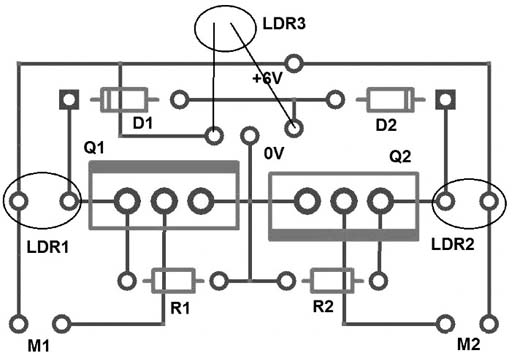
O circuito completo do Robô Escova 2 dirigido pelo foco de uma lanterna comum é mostrado na figura 8.

Na versão inicial experimental que montamos usamos duas pequenas pontes de terminais como chassi para os componentes, conforme mostra a figura 9.

Nesta montagem usamos resistores fixos (R1 e R2 de 10k) em lugar dos trimpots indicados no diagrama como P1 e P2, mas isso é opcional.
Na foto da figura 10 temos a versão em ponte de terminais montada.
O circuito também pode ser montado numa placa de circuito impresso com o desenho mostrado na figura 11.
Montagem Mecânica – Passo a Passo
a) prepare a escova entortando-se as cerdas num único sentido e direção para que ele caminhe em linha reta. Use para esta finalidade um secador de ar quente, conforme mostra a figura 12.
b) Depois de preparada a escova, corte um pedaço de plástico (pode ser uma régua comum) com um comprimento de 8 a 10 cm, e largura de 3 a 4 cm conforme mostra a figura 13.

c) Cole este pedaço de plástico na escova na posição indicada na figura.
d) Depois, desligue provisoriamente os motores da placa ou ponte e cole-os na régua com os eixos voltados para trás em relação ao movimento do motor. A figura 14 mostra como fazer isso.

Posteriormente, quando a placa ou ponte forem fixadas, os motores serão religados. Para colar use uma cola forte, pois a vibração do motor tenderá a soltá-lo se a cola não for boa.
e) Depois, prepare dois contra-pesos com uma porca ou arruela, prendendo no eixo do motor, como no projeto anterior, e conforme mostra a figura 15.

Será importante fazer testes em relação ao melhor tamanho da arruela ou porca usada, para se obter o melhor desempenho do robô. Uma arruela ou porca muito pequena farão o robô vibrar sem sair do lugar.
f) O próximo passo consiste em colar o suporte de pilhas na escova.
Montagem Eletrônica - Passo a Passo
1. Corte 6 pedaços de fio flexível fino com aproximadamente 12 cm cada e solde nas posições correspondentes a M1, m2, 0 V e +6 V, conforme mostra a figura 16.

2. Encaixe e solde os transistores, observando a posição das aletas. Solde os terminais por baixo da placa e corte os excessos.

3. Solde os resistores R1 e R2 nas posições indicadas. Dobre seus terminais para que fiquem na posição vertical. Não há polaridade para estes componentes.

4. Solde os diodos (D1 e D2) observando sua posição. Veja que a faixa que indica o catodo do diodo deve estar de acordo com a posição da faixa marcada na placa para cada um deles.

5. Solde os LDRs. Veja que eles ficam altos na placa, ou seja, com os terminais longos, para facilitar seu posicionamento no controle.

6. Faça as interligações conforme o esquema.

Interligações:
a) Fios de M1 e M2 ligados aos motores (qualquer polaridade)
b) Fio +6 V a um dos pólos do interruptor
c) Fio 0 V – emendar ao fio preto (negativo) do suporte de pilhas
d) Solde o fio vermelho do suporte de pilhas ao outro pólo do interruptor
7. Protegendo os LDRs - como o circuito é muito sensível, os LDRs devem ser dotados de pequenos anteparos que construímos enrolando um pedacinho de fita isolante em cada um, conforme mostra a figura 18.

Este recurso evita que a luz ambiente interfira no controle, o que ocorrerá principalmente se a sua movimentação ocorrer em local muito iluminado.
A alimentação vem de quatro pilhas pequenas, que fornecem potência suficiente para um bom movimento do robô.
A polaridade do suporte de pilhas deve ser observada, pois se houver inversão o circuito não funcionará.
Teste da Parte Eletrônica
Completada a montagem, confira as conexões de todos os componentes e ligando a alimentação depois de colocar as pilhas no suporte.
Se os transistores e as pilhas aquecerem, desligue imediatamente o circuito (atuando sobre o interruptor) e verifique se os diodos estão nas posições certas. Podem estar invertidos.
Ilumine separadamente os LDRs para verificar se os motores respondem aos comandos.
Se, ao iluminar o LDR 3 apenas um motor funcionar ou nenhum motor funcionar, verifique se um dos diodos, ou os dois diodos, está invertido.
Com a parte eletrônica funcionando, podemos passar a parte mecânica.
Obs.: neste projeto o sentido de rotação dos motores não é importante.
Completando a Montagem
Se sua versão for em ponte de terminais, cole a ponte da posição indicada na figura 23. Veja também a foto de nosso protótipo.

Se a versão for montada em placa de circuito impresso, normalmente com os motores colados ela fica presa em posição de funcionamento se forem usados fios rígidos.
Ressolde os motores.
Posicione os LDRs de modo que recebam luz da lanterna na posição indicada nas figuras.
Confira a montagem, e se tudo estiver em ordem, passe para o próximo item.
Teste e Uso
Coloque as pilhas no suporte, e leve o robô para um local que não tenha muita iluminação. Ligue a chave que alimenta o circuito.
Segure inicialmente o robô na sua mão, sem colocá-lo no chão.
Depois, iluminando os LDRs com a lanterna, verifique se os motores funcionam da forma indicada.
Iluminando o LDR1 motor 1 funciona, iluminando LDR2 o moto 2r funciona e iluminando o LDR3 os dois motores funcionam.
Se, ao iluminar o LDR3 apenas um motor funcionar, um dos diodos pode estar invertido e se os dois não funcionarem, os dois diodos podem estar invertidos.
Coloque o robô no chão e tente controlá-lo com a lanterna.
Se o robô tender a desviar uma direção quando LDR3 for iluminado, as cerdas podem estar tortas.
Outra possibilidade para dificuldade de controle é a posição do suporte de pilhas e o centro de gravidade do projeto. Você pode tentar descolar o suporte de pilhas mudando de posição.
Outra possibilidade consiste em colocar contra-pesos, por exemplo, chumbinhos de pesca de um dos lados de modo a corrigir a tendência dele virar apenas num sentido.
Se o movimento for muito lento, as cerdas podem precisar de uma alteração maior da posição ou devem ser usados contra-pesos maiores nos eixos dos motores.
Com um bom treinamento você vai conseguir dirigir seu robô com a lanterna.
Competição
Vários tipos de competições podem ser programadas com o robô escova.
A primeira consiste numa corrida com obstáculos em que os robôs devem percorrer uma certa distância enfrentando obstáculos que podem ser pinos com cores diferentes.
As cores dos pinos determinarão os pontos perdidos no percurso.
Em caso de empate nos pontos perdidos, vale o tempo de chegada.
A segunda possibilidade é que cada competidor percorra uma certa distância numa pista de obstáculos, contando-se os obstáculos derrubados.
Melhorias no projeto original podem ser feitas com a implementação de controles remotos sem fio, wi-fi usando um tablet ou smartphone.
a) Parte Eletrônica
Q1, Q2 – TIP120 - Transistor NPN Darlington de potência
LDR1, LDR2, LDR3 – LDRs redondos pequenos
P1, P2 – Trimpots de 10k ou resistores fixos de1k a 10k
D1, D2 – 1N4148 – diodos de uso geral
M1, m2 – Motores de corrente contínua de 6 V
S1 – Interruptor simples
B1- 6 V – 4 pilhas pequenas
Diversos:
Ponte de terminais ou placa de circuito impresso, fios, suporte de 4 pilhas pequenas, solda, etc.
b) Parte Mecânica
Escova Cygnus de 13 cm, régua de plástico, cola, arruela ou porca, fita isolante, etc.
Veja filmes no Youtube no link:










