O leitor interessado nos sistemas de segurança e automação residencial ou predial deve saber dos custos envolvidos no controle Pan&Tilt para as câmeras de segurança. As vantagens desse sistema são muitas, pois permitem uma visão "panorâmica" do local monitorado. Neste artigo propomos a montagem de um controle Pan&Tilt de baixo custo e sem o uso de microcontroladores, mas bastante versátil, que poderá ser utilizado em ambientes internos e até mesmo externos.
Márcio José Soares
https://www.arnerobotics.com.br/
Nota: Este artigo é de uma Mecatrônica Fácil de 2007
MAS O QUE É PAN&TILT?
Para o leitor que trabalha ou já trabalhou com sistemas de segurança e afins, este termo não é nenhuma novidade. Porém, para o restante dos leitores, principalmente para aqueles que iniciam neste momento no mundo da Mecatrônica, talvez o termo não seja muito comum. Sua origem vem das palavras inglesas Panorama e Tilt. Ao traduzirmos da forma técnica, estamos dizendo que o sistema tem capacidade de movimentação "panorâmica" (giro no eixo horizontal) e capacidade de "inclinar-se" (giro no eixo vertical). Podemos compreender melhor o que foi dito observando a figura 1
Nos dias atuais, monitorar um determinado local não é apenas questão de ordem para segurança. Muitas empresas também estão instalando sistemas de monitoramento em parte de sua área fabril e outras. É o caso, por exemplo, de algumas prestadoras de serviços como auto mecânicas, que permitem aos seus clientes "fiscalizar" via Internet o andamento do serviço realizado em seu veículo.
Em uma outra situação um "encarregado" poderia, por exemplo, verificar o trabalho em seu departamento à distância sem a necessária presença dele no local (muito utilizado por empresas com filiais).
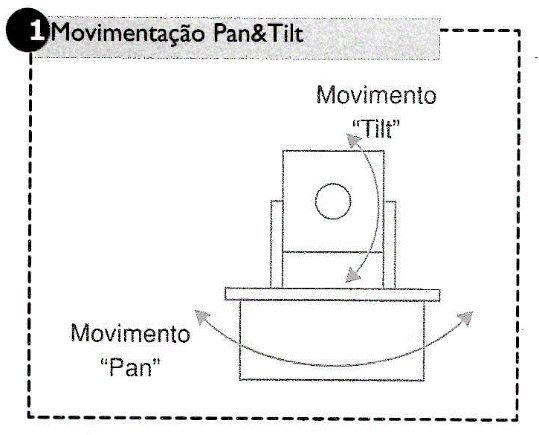
Porém, a maior aplicação é sem dúvida alguma nos sistemas de segurança domésticos e prediais. Em alguns ambientes a aplicação de várias câmeras torna-se às vezes um tanto complicado. É o caso de grandes ambientes e corredores de escritórios, empresas e até edifícios. Na figura 2 temos um exemplo do que foi dito.
No caso demonstrado, nota-se que para monitorar um corredor em forma de "U", seria preciso colocar pelo menos três câmeras fixas. Com o uso de um controle direcional Pan&Tilt para as câmeras, apenas duas seriam necessárias.
A viabilidade desse projeto é ainda maior em grandes ambientes como galpões, chão de fábrica, salões de entrada em edifícios e muitos outros. Com uma única câmera é possível cobrir todo (ou quase todo) o ambiente, apenas realizando a varredura através do recurso Pan&Tilt.
A PROPOSTA
No mercado, atualmente, existem vários modelos dedicados ao controle Pan&Tilt para câmeras de segurança. Alguns sistemas já são fornecidos com a câmera e recursos para interligação com Intraners e a Internet (IP). Na figura 3 damos um exemplo comercial para este tipo de câmera.
Entretanto, para muitos o custo deste tipo de equipamento é quase que inviável e o controle da câmera via Internet totalmente desnecessário.
Pensando nisto, desenvolvemos um sistema de baixo custo, sem o uso de microcontroladores, o que torna esta montagem ideal também para o leitor que se encontra no nível "básico" do aprendizado em Eletrônica/Mecatrônica.
O sistema possuí uma única unidade de controle, projetada com componentes discretos e muito fáceis de se encontrar no mercado especializado. Basicamente; dois potenciômetros controlam a posição de dois servos comuns, do tipo utilizado em aeromodelismo, dispostos mecanicamente de maneira a permitir o movimento Pan&Tilt (nesta edição o leitor encontrará o artigo que explica como construir a parte mecânica deste projeto).
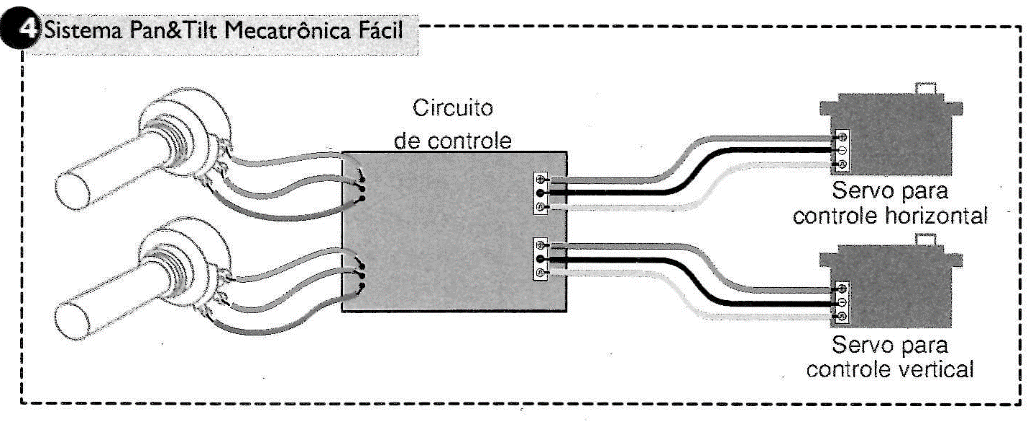
Apesar do sistema utilizar servos para movimentar o conjunto, os movimentos são bastante precisos e com boa "cobertura" (ângulo de visada). A figura 4 demonstra o sistema.
O CIRCUITO
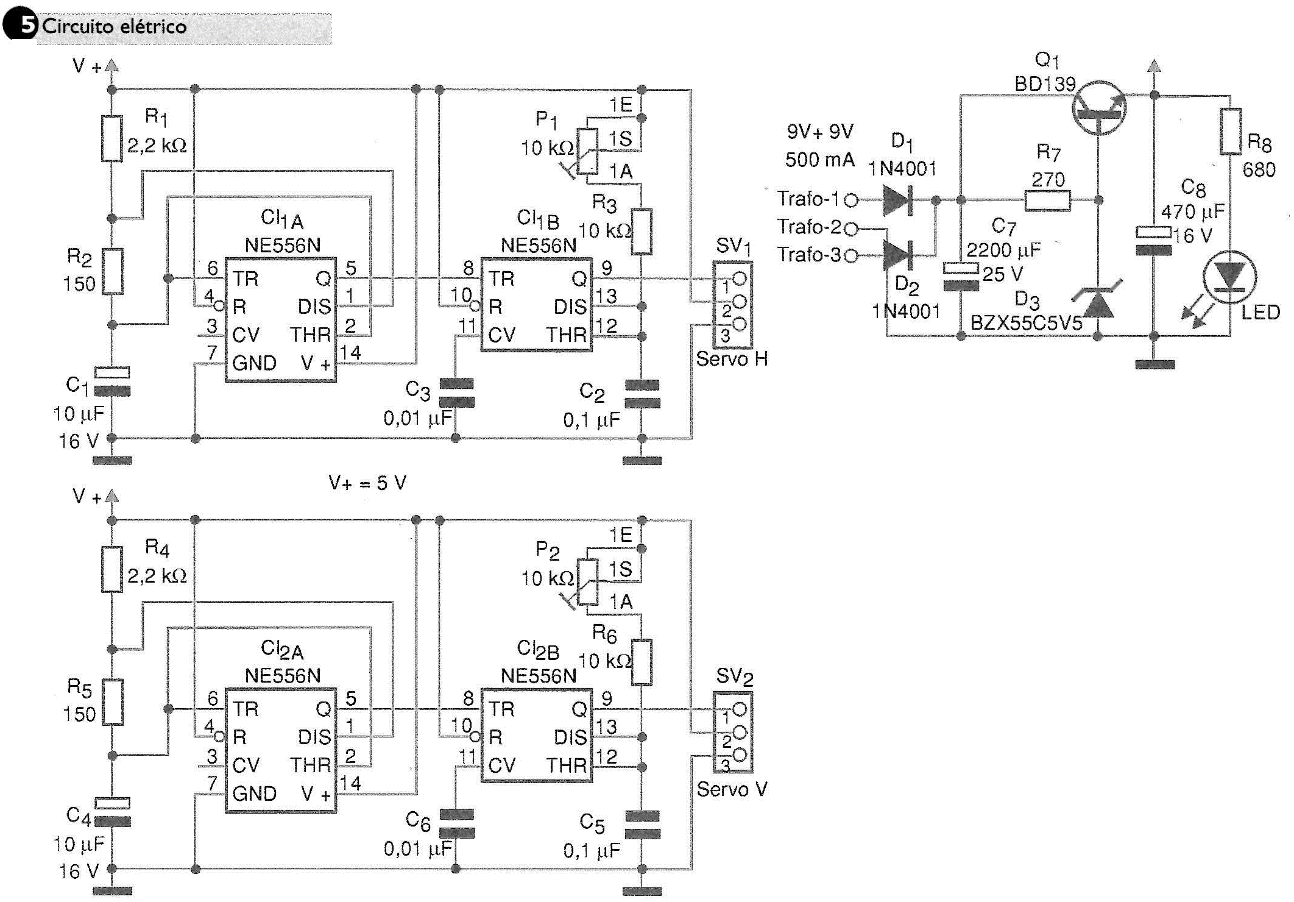
Na figura 5 temos o esquema elétrico do circuito. Em dois componentes, inserimos toda a "lógica" necessária para a operação do módulo. Se o leitor observar atentamente, verá que o circuito possui duas partes iguais, uma vez que são dois servos a se controlar. Cada parte foi projetada com um NE556 (duplo NE555). A análise que faremos para uma parte (controle do servo 1 — SV1) do circuito é também válida para a outra parte. Na figura 6 o leitor tem um diagrama de blocos para melhor compreensão do funcionamento do sistema.
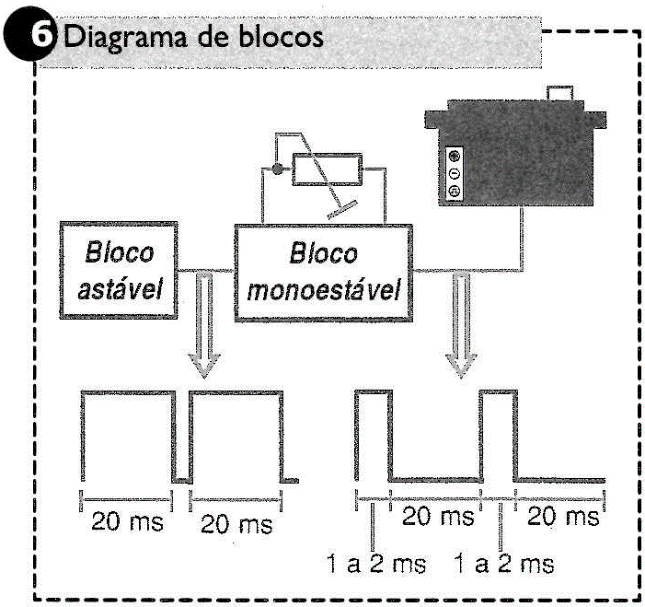
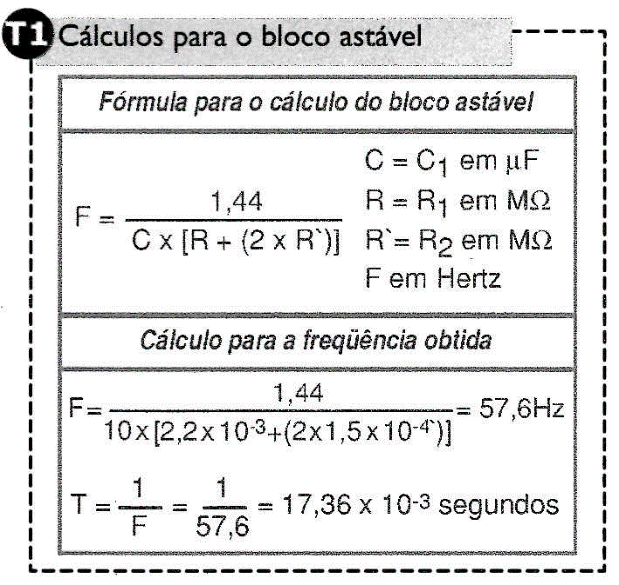
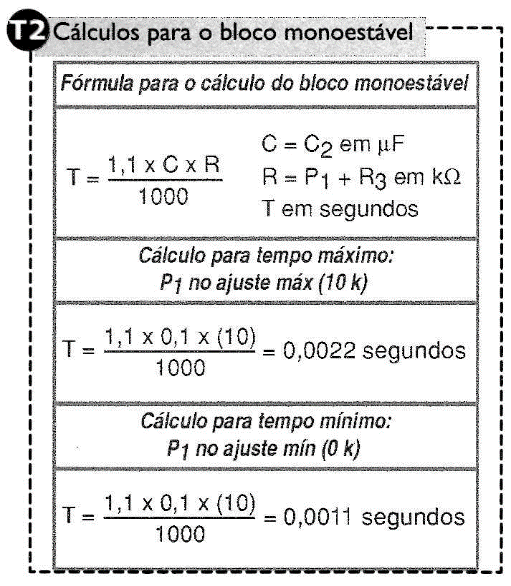
Temos no primeiro bloco um oscilador do tipo astável (primeiro "555" - CI1A) controlando um temporizador monoestável (segundo "555" - CI1B). O primeiro gera pulsos próximos a 20 ms (0,02s) e o segundo, quando ativado, gera pulsos de 1ms a 2ms (0,001s e 0,002s). O controle da posição do servo é feito alterando-se o valor de "R" (potenciômetro P1) forçando a transição do valor máximo para o mínimo no monoestável (e vice-versa). Nas tabelas 1 e 2 são dadas as fórmulas e a demonstração dos cálculos para cada bloco (astável e monoestável).
A fonte do circuito também é bem simples. Trata-se de uma fonte linear com regulador série. A figura 7 ilustra o diagrama de blocos de nossa fonte.
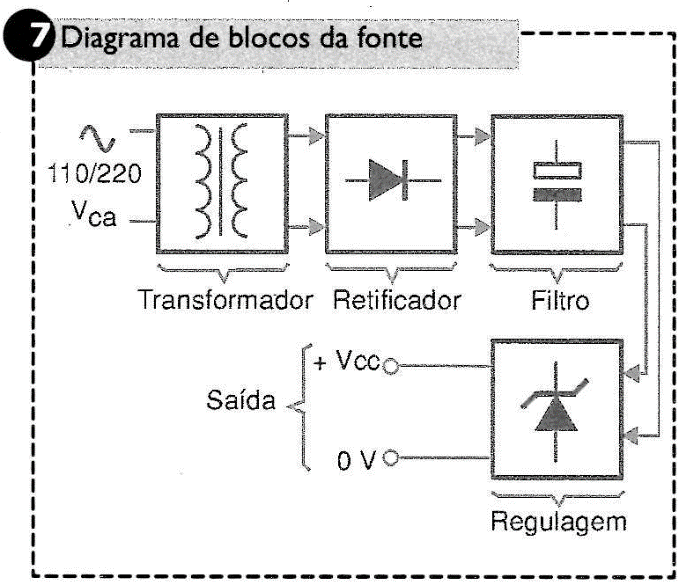
O transformador T1 reduz a tensão da rede para uma tensão de trabalho mais adequada (9 V+9 V) aos circuitos eletrônicos mais delicados. O bloco retificador é formado pelos diodos D1 e D2 que fazem a retificação em onda completa.
O bloco de filtragem é composto pelo capacitor C7, que ajuda na eliminação da corrente pulsante continua resultante da retificação. Seu valor deve estar entre 1500 µF e 4700 µF. Em nosso protótipo utilizamos um capacitor de 2200 µF com tensão de trabalho de 25 V.
O bloco de regulagem série é composto pelo resistor R7, o diodo zener D3 e o transistor Q1. Juntos, estes componentes formam um regulador de série 5VDC. O diodo D3, polarizado pelo resistor R7, mantém constante a tensão na base de Q1 em 5,6 V. Para conduzir, o transistor 01 precisa de uma tensão de base de aproximadamente 0,6 V maior que a tensão de emissor. Assim, com um diodo de 5,6 V garantimos uma tensão no emissor de 5 VDC, tensão mais que adequada para o funcionamento do circuito e servos.
O capacitor C8 ajuda na filtragem do ripple (pequena oscilação restante da etapa de filtragem). Seu valor deve estar entre 220 µF e 470 µF, com uma tensão de trabalho mínima de 16 V. O LED1, juntamente com seu resistor limitador de corrente, R8, tem aplicação visual informando que a fonte está operando normalmente e, consequentemente, se o circuito está ou não ligado.
É importante salientar que neste tipo de fonte é preciso garantir que a tensão DC na entrada do regulador série seja pelo menos 2 V maior que a tensão desejada na saída.
MONTAGEM
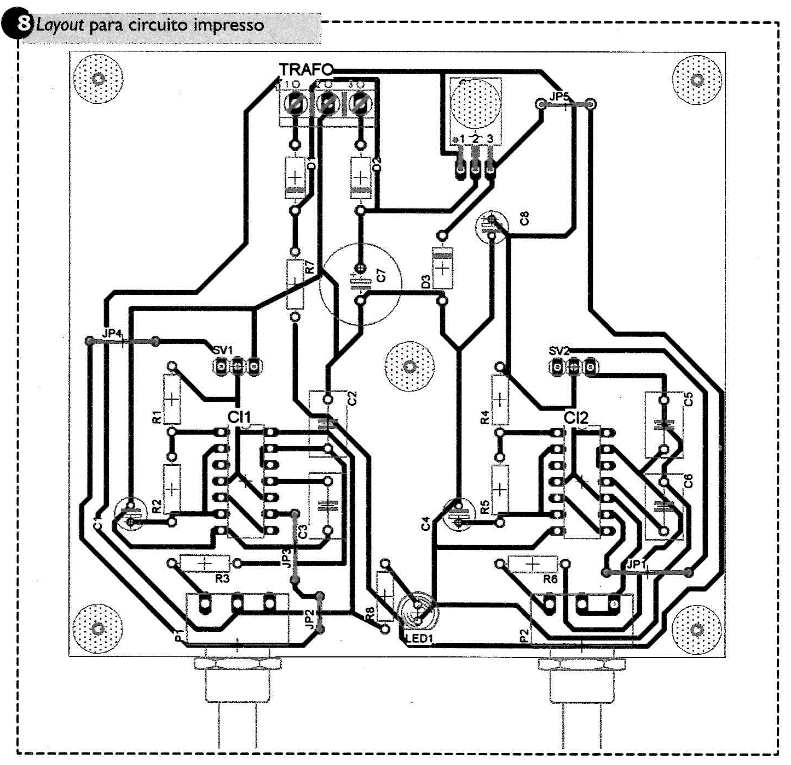
Na figura 8 o leitor tem nossa sugestão para o layout do circuito impresso. Esse desenho foi usado em nosso protótipo e é a prova de erros. O leitor também poderá utilizar outros métodos para a montagem do circuito como uma placa padrão, por exemplo. A escolha é livre.
Comece por montar os jumpers presentes no circuito. Eles podem ser feitos com pequenos pedaços de fios rijos, por exemplo, e preferencialmente encapados. Solde posteriormente os resistores e capacitores.
Tenha cuidado para não trocar os resistores. Utilize a lista de materiais se tiver dúvidas na identificação dos mesmos (código de cores). Os capacitores também requerem um certo cuidado na sua montagem, pois os valores adotados podem confundir o leitor (100 nF e 10 nF). Qualquer inversão poderá surtir efeitos indesejados ao circuito e este não funcionará adequadamente.
Tenha cuidado na montagem dos componentes polarizados como os capacitores eletrolíticos (C7 e C8), além é claro dos diodos (D1, D2 e D3), o LED1 e o transistor (Q1). Os Cls (Cl1 e Cl2) também são polarizados e requerem o mesmo cuidado. É altamente recomendável o uso de suportes para ambos os Cls.
O emprego de um pequeno radiador de calor para o transistor Q1 também é recomendável, principalmente se o circuito for usado por longos períodos.
A utilização de conectores tipo barra de pinos para a ligação dos servos é facultativo. O leitor poderá, por exemplo, optar por ligar o cabo de conexão com os servos diretamente na placa. Este cabo poderá ter em média até 10 metros de comprimento, dependendo da sua qualidade.
O cabo de ligação com os servos nada mais é que uma extensão para os mesmos, com a metragem adequada de maneira a ligar o módulo de controle aos servos (parte mecânica), conforme demonstrou a figura 4 no início deste artigo.
Os potenciômetros P1 e P2 podem ser do tipo circular ou ainda deslizastes. A escolha de um ou outro é livre. A única recomendação diz respeito a seus valores que devem ser necessariamente os indicados na lista de materiais (10 kΩ) e com variação de sua resistência de maneira linear (não use para esta montagem os logaritmos).
O transformador T1 pode ter os terminais do seu secundário soldado diretamente à placa ou ainda ligados a ela através de um conector tipo parafusável, como o utilizado em nosso protótipo. A escolha é livre. Sua tensão de secundário deve ser necessariamente 9 V+9 V (transformador com derivação central) e corrente de trabalho de 300 mA a 500 mA.
A ligação do primário do transformador deve ser feita de acordo com o tipo a ser empregado pelo leitor. Basicamente, existem dois tipos: primário simples (um único enrolamento com derivação) ou ainda primário duplo (dois enrolamentos independentes). Dependendo do transformador em mãos o leitor deverá optar por uma ligação conforme a figura 9.
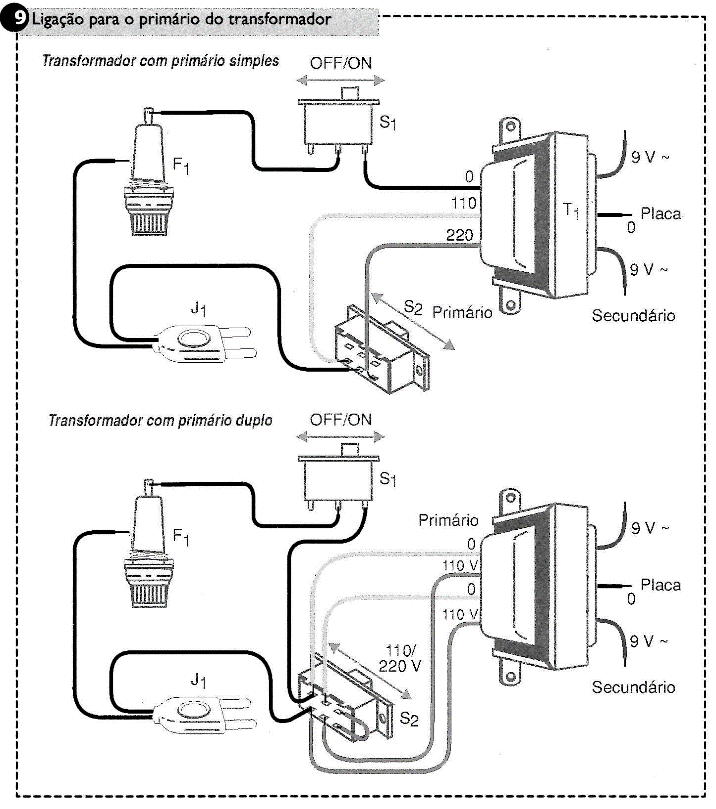
O leitor deve ter notado que nesta figura foram inseridos alguns componentes a mais, que não estão presentes no circuito principal (mas sim na lista de materiais). Temos nesta figura uma chave liga/desliga (S,), uma chave seletora de tensão para rede 110 V/220 V (Se) e um porta fusível (F1). O uso destes componentes é opcional e deixamos essa escolha livre. A simples ligação do rabicho ao primário do transformador, desde que feita de maneira correta, permitirá conectar o circuito à rede elétrica AC.
Mais informações
A cor dos fios utilizada em nosso desenho é meramente ilustrativa. Cada fabricante emprega um conjunto de cores para seus transformadores, não havendo uma padronização. É altamente recomendável que o leitor ao adquirir o transformador, se informe no balcão da loja sobre identificação do primário e secundário assim como a forma de sua ligação (utilização das cores pelo fabricante) para posteriormente ligá-lo de maneira correta.
Para finalizar a montagem do módulo de controle, o leitor poderá inserir o circuito em uma caixa plástica como as fornecidas pela empresa Patola (www.patola.com.br), ou ainda em uma outra qualquer montada com outros materiais como: madeira, ferro ou alumínio. Apenas lembrando que o ferro e alumínio são materiais condutores e, neste caso, a placa não poderá ser apoiada diretamente sobre o fundo da caixa sob o risco de curto-circuito com danos ao próprio circuito e à rede elétrica. Se usar estes materiais na montagem da caixa, procure isolar tudo muito bem (placa, cabos e outros) para evitar problemas.
Mais informações
Conforme mencionado, a montagem mecânica para o Pan&Tilt está descrita nesta edição num artigo escrito por José Franci Jr. Para finalizar sua montagem de maneira definitiva, o leitor deverá efetuar também a montagem da parte mecânica, utilizando para isso o referido artigo e as dicas passadas no mesmo.
Não trataremos da montagem da câmera na parte mecânica, pois isto dependerá de cada modelo. A ligação elétrica da câmera também não será tratada neste artigo, pois a mesma não possui qualquer ligação elétrica com o módulo de controle Pan&Tilt aqui descrito e, sendo assim, para que a ligação da câmera de segurança ao monitor ou TV seja feita com sucesso, o leitor deverá tratá-la de maneira independente. Recomendamos que colha tais informações junto a loja onde adquirir a câmera.
TESTE E USO
Antes de prosseguir com os testes, verifique toda a montagem. Cheque todas as ligações. Não tenha pressa nesta etapa. Quantos, um dia, não disseram: "eu tenho certeza que tudo está certo" e se arrependeram em seguida ao perceber que seu projeto havia se danificado, simplesmente porque havia sim algo ligado errado.
Após tudo checado, verifique se a tensão selecionada na ligação do secundário do transformador (chave seletora de tensão) está posicionada para a tensão de sua rede. Se durante a montagem o leitor optou pela proteção do mesmo através de um fusível, ele deverá estar presente. Posicione os potenciômetros a meio curso. Ligue o circuito através da chave liga/desliga. Imediatamente o leitor poderá ver os servos se movimentarem.
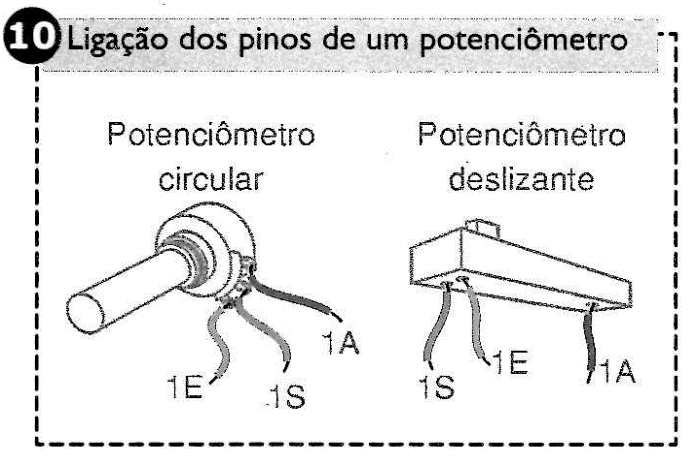
Se os comandos parecerem trocados entre si (vertical com horizontal, e vice-versa), bastará trocar a posição da ligação dos cabos dos servos no circuito principal. Caso o leitor note qualquer movimentação invertida nos eixos, ou seja, ao girar o potenciômetro para a direita, por exemplo, e o servo se mover para o outro lado (esquerda), terá de providenciar a alteração na ligação do potenciômetro de controle horizontal. Para tanto, bastará inverter a ligação dos pontos "extremos" do mesmo. No circuito estes pontos estão representados por 1 E e 1 A. A figura 10 mostra estes pontos tanto para o potenciômetro tipo circular, quanto para o potenciômetro deslizante.
Após os testes e com a confirmação do funcionamento do circuito, o leitor poderá providenciar os ajustes mecânicos. Posicione novamente os potenciômetros a meio curso. Agora acerte mecanicamente a estrutura Pan&Tilt para que esta também fique centralizada de maneira que o movimento seja igual para ambos os lados (esquerda e direita) e também para cima e para baixo, cobrindo assim uma área de visão mais ampla e correta. Se tudo estiver ok, basta agora instalar o sistema onde desejar e então usá-lo.
CONCLUSÃO
Com o uso de componentes discretos pode-se fazer muita coisa que para a maioria só seria possível com a aplicação de um microcontrolador. Com um pouco de criatividade e conhecimentos em eletrônica básica pode-se idealizar uma série de circuitos úteis e a um custo bastante baixo. Esperamos que este circuito seja útil ao nosso leitor e também que o mesmo sirva como exemplo para outros controles e automatismos. Boa montagem e até a próxima!