









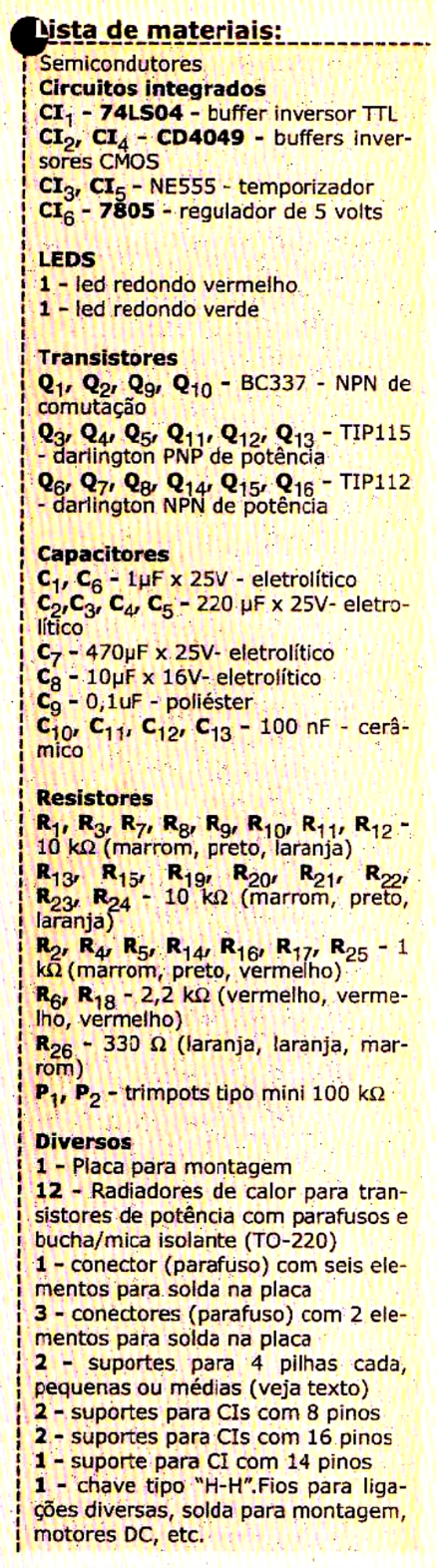
É do conhecimento de todos o impacto do custo da montagem de um pequeno robô. Pensando nisso, desenvolvemos uma placa que permitirá ao leitor o controle total de até dois motores DC com voltagens entre 6 V e 12 V e com reaproveitamento total nos mais variados projetos de microrobótica e/ou automação. Montando duas placas como esta, é possível controlar um "braço mecatrônico", por exemplo, com até quatro motores DC. Trata-se de uma placa modular.
Nota: Este artigo saiu numa Mecatrônica Fácil de julho de 2003
Atualmente, o controle de robôs tornou-se algo simples. Temos vários microcontroladores para escolha, alguns do tipo "embedded" de fácil uso e manejo. Porém, o maior problema ainda reside nos controles dos motores a serem utilizados, pois os microcontroladores não podem "operar" diretamente um motor DC devido à baixa corrente de dreno de um microcontrolador. A placa que propomos neste artigo, aliada a um microcontrolador ou mesmo circuito digital, poderá controlar até dois motores de forma independente e completa. E caso seja necessário o controle de um número maior de motores, bastará aplicar mais placas "drive".
O CIRCUITO
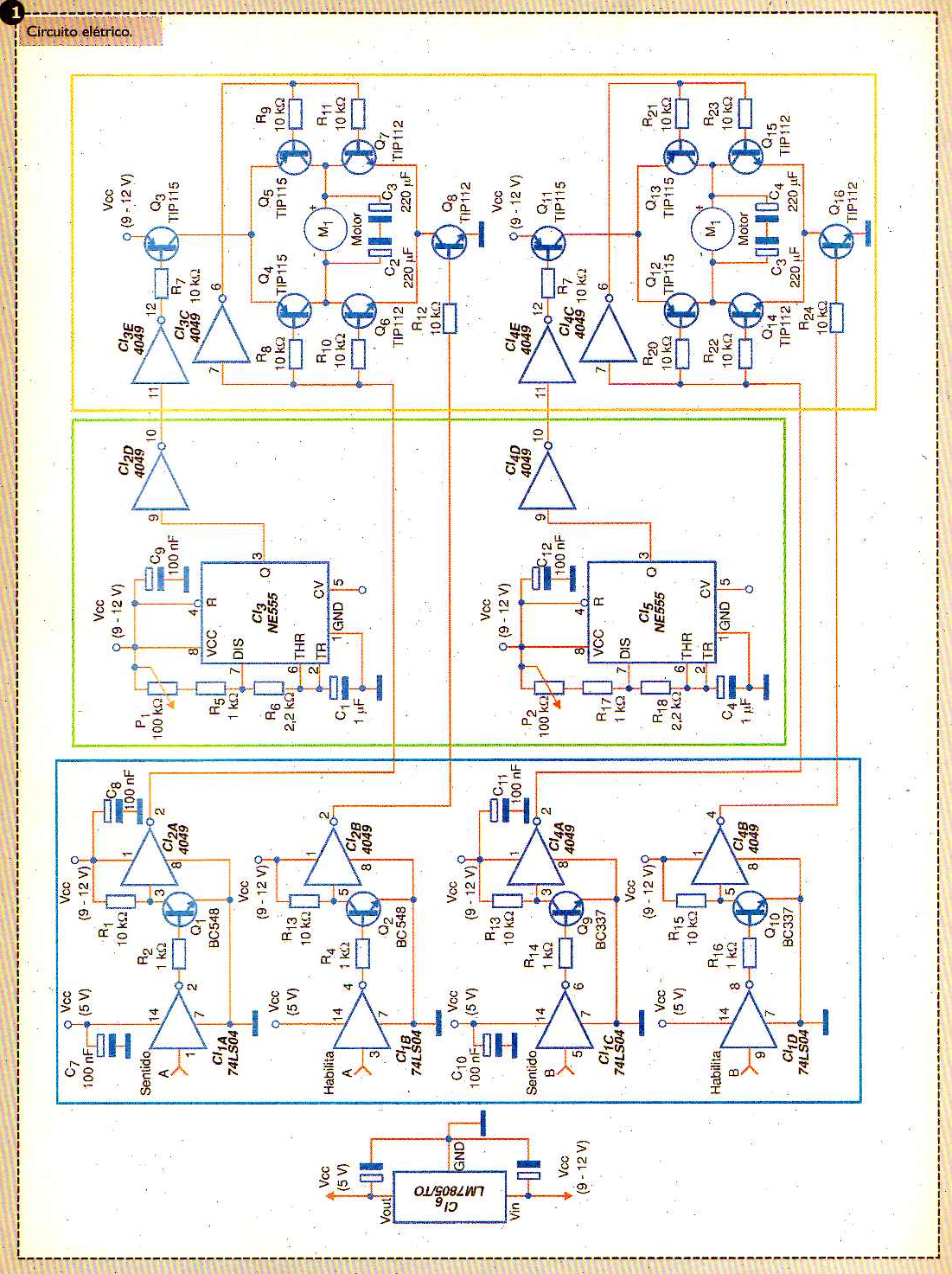
O circuito pode ser visto na figura 1. Na figura 2 o leitor encontrará um diagrama de blocos que o ajudará a compreender melhor o funcionamento do circuito.
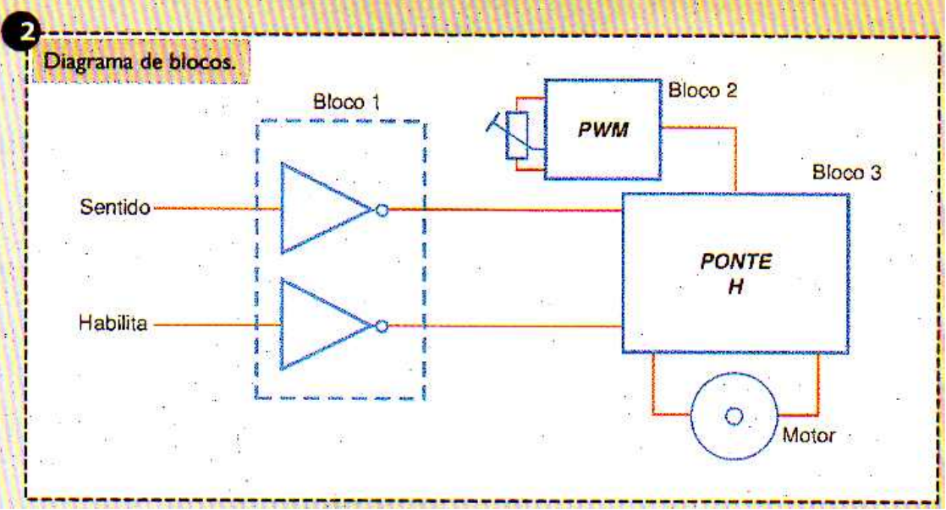
No bloco "1" temos a entrada de comunicação do circuito. Por esta etapa, a placa recebe os sinais de controle do motor por parte do microcontrolador ou circuito de controle. Trata-se de um circuito adaptador TTL/ CMOS. A maioria dos microcontroladores disponíveis no mercado opera com 5 VDC (TTL), e o circuito da "Placa Drive" pode controlar motores com tensões de 6 V a 15 VDC. A adaptação é importante, pois impede que nosso "microcontrolador" se danifique. Esta parte no circuito está demonstrada em azul.
No bloco "2" temos o circuito PWM (Modulação por Largura de Pulso), na parte verde do circuito, implementada com um NE555 configurado como "astável". A largura do pulso é variável e controlada em P1 e sua variação é dada pela fórmula apresentada na tabela 1.
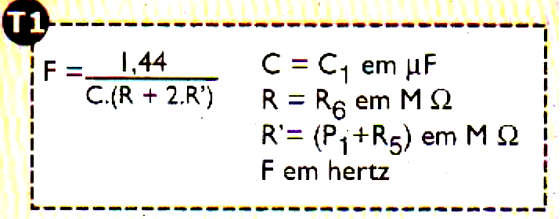
O leitor deve notar que devido à presença de um "trimpot" (P1) os cálculos devem ser feitos para o potenciômetro aplicando o máximo de sua resistência e também para ele aplicando o valor inferior (zero).
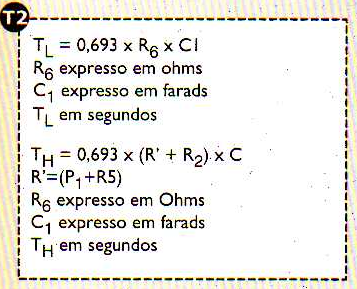
Um outro fator importante é que os tempos em que o sinal permanece alto e permanece baixo também são diferentes (observe a figura 3). Assim na tabela 2 o leitor possui as fórmulas para calcular TL e TH, tempo baixo e tempo alto respectivamente.
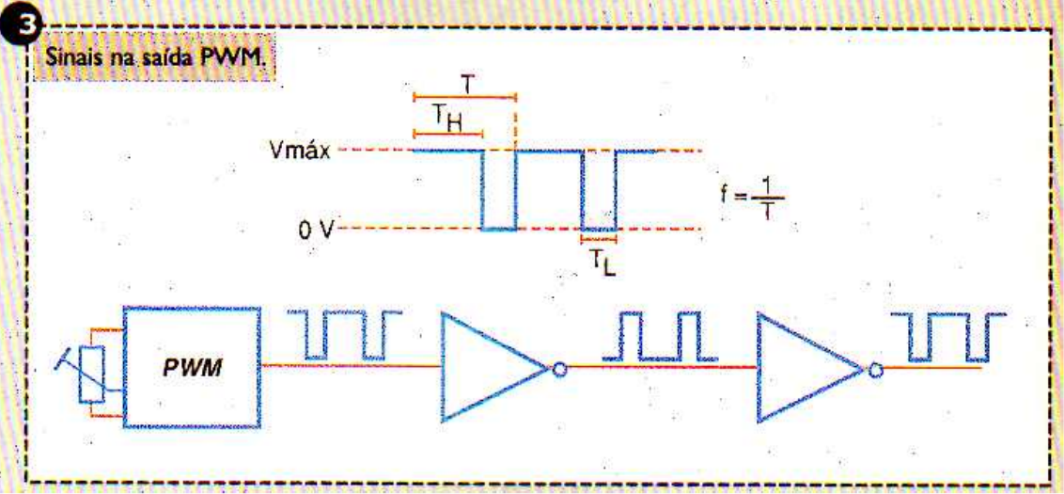
O sinal PWM obtido na saída do NE555 é invertido por duas portas do C13 (ou C14). Essa inversão é feita para um aproveitamento maior das portas do Cl e também para reforçar o sinal a ser oferecido ao transistor que inserirá o pulso no próximo bloco. Na figura 3 o leitor tem o sinal em cada ponto da saída PWM.
No bloco. "3" temos uma ponte de transistores tipo "H" (parte amarela do circuito). Este tipo de ponte já foi detalhado em uma matéria muito interessante de Newton C. Braga, na Mecatrônica Fácil n° 04 de maio/2002. Uma leitura detalhada deste artigo poderá ajudar a compreender melhor o circuito aqui proposto. Como efeito elucidativo, o leitor pode ver na figura 4 o funcionamento da ponte "H" adotada para este circuito.
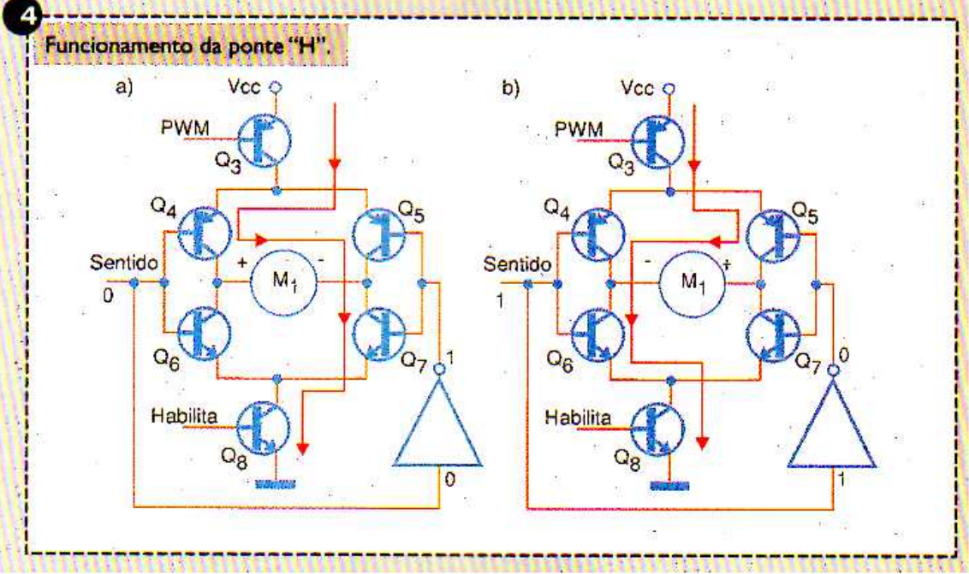
Seguindo essa figura, analisaremos o circuito para o controle de um motor. O funcionamento para o controle do outro motor é igual e a análise deve ser feita de modo análogo, apenas trocando as indicações dos transistores.
O transistor Q3 é o componente que transfere os pulsos do circuito PWM. Estes pulsos são aplicados aos transistores Q4 e Q5 em seus emissores. Assim, a frequência PWM determina por quanto tempo a ponte "H" tem tensão e por quanto tempo não tem (largura do pulso positivo). Quando aplicamos um sinal de nível lógico "0" na entrada "Sentido" o transistor Q4 entre em condução e Q6 fica em corte. Com a ajuda de um inversor, o nível lógico "0" é aplicado e à outra parte da "ponte", porém com seu nível invertido. Neste momento Q7 está conduzindo e 05 em corte. Assim, o motor gira em um 'sentido (figura 4a). Se o nível lógico na entrada "Sentido" for igual a "1", Q6 passará a conduzir e Q4 estará "cortado". O nível lógico "1" é aplicado também à outra parte da ponte, porém com nível lógico "0". Nesse momento; Q5 passa a conduzir e Q7 fica "cortado". O motor girará no outro sentido. O circuito opera então invertendo a polaridade da alimentação que. o motor recebe. O transistor Q8 habilita ou desabilita o circuito. Ou seja, é necessário que esse transistor esteja conduzindo para que o circuito funcione.
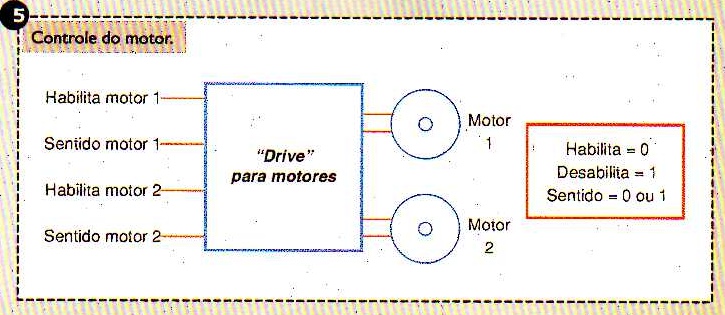
Podemos notar que se inserirmos um nível lógico "1" na entrada habilitadora correspondente ao motor que desejamos controlar, o mesmo entrará em funcionamento, com sentido determinado pela respectiva entrada e com velocidade determinada pelo potenciômetro de controle do circuito PWM deste. Assim, com apenas dois sinais podemos controlar completamente um motor. E esses sinais obedecem à lógica digital ("0" e "1"), compatibilizando-os motores a qualquer circuito digital e microcontrolador existente no mercado". Veja a figura 5.
MONTAGEM
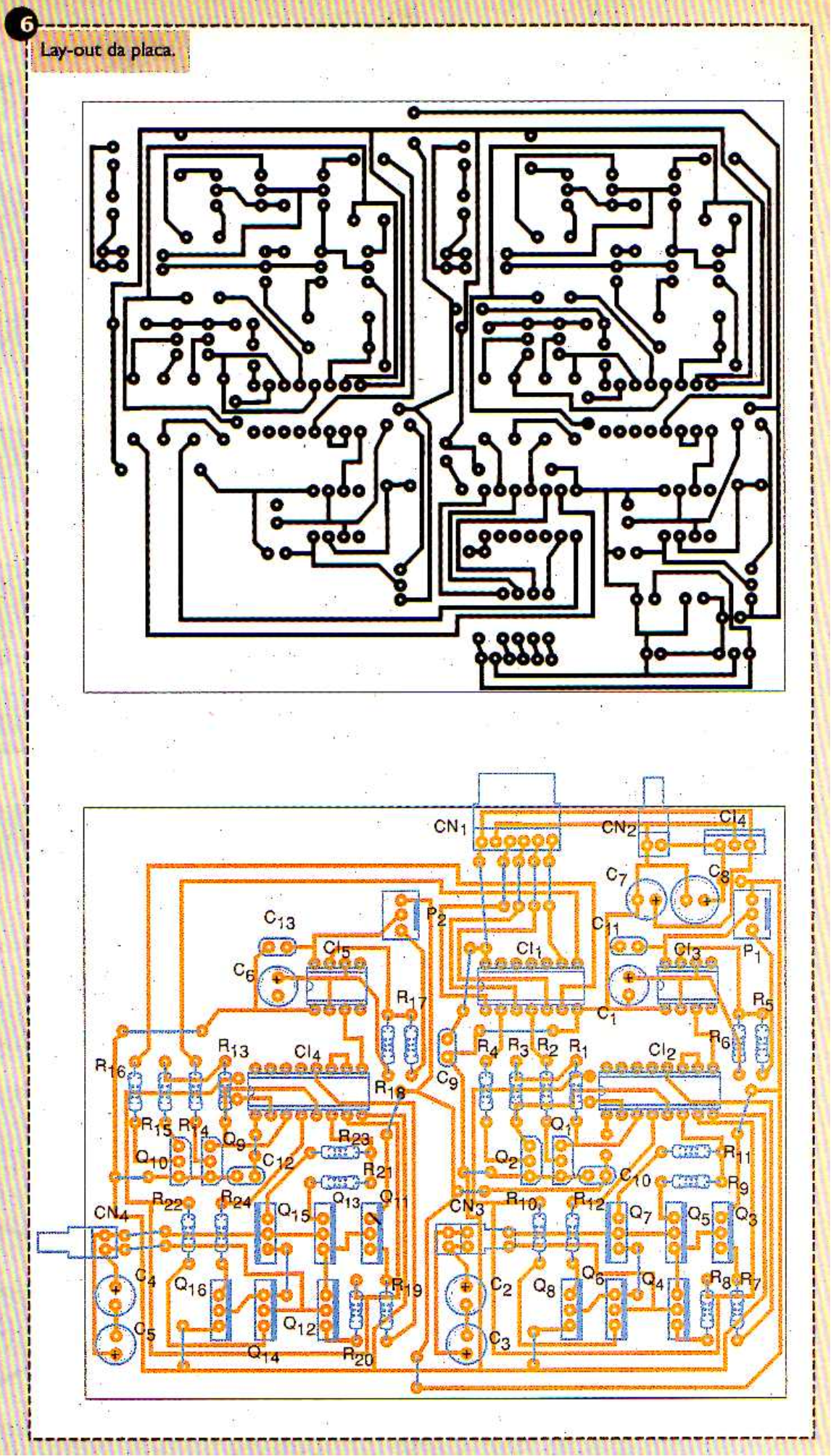
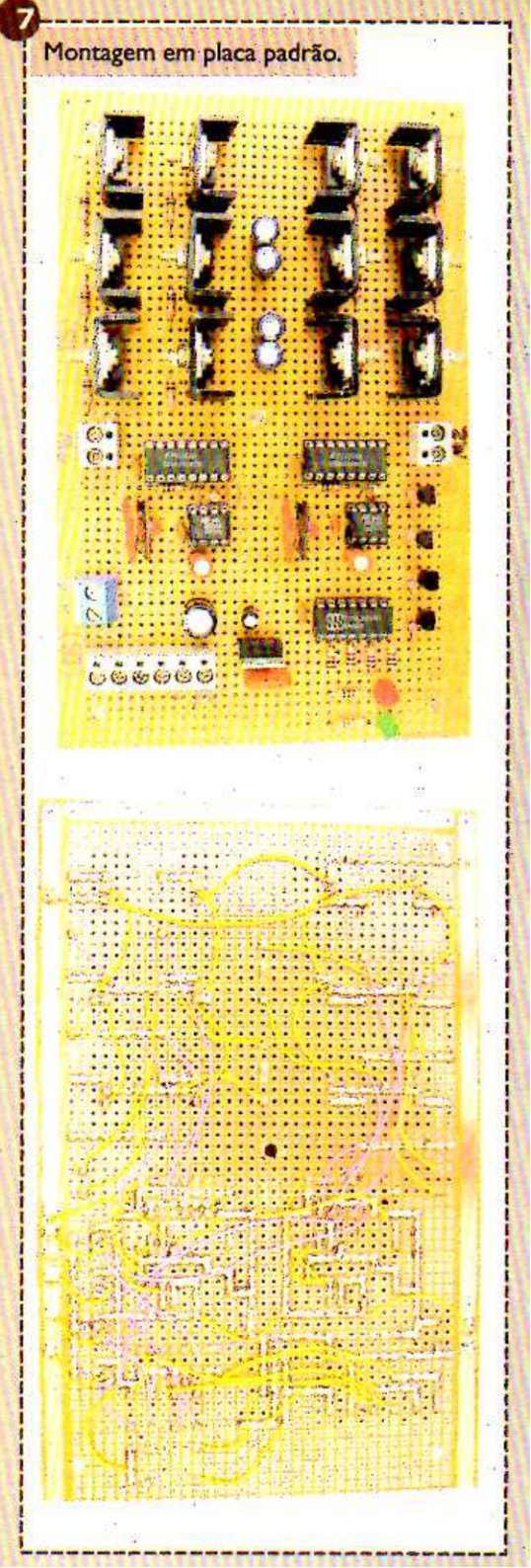
A montagem do circuito pode ser feita em placa tipo padrão ou mesmo em placa de circuito impresso, utilizando-se para isso o "lay-out" da figura 6. O autor usou em sua montagem uma placa padrão com 10 x 16 cm com "ilhas não interligadas" (figura 7).
O leitor deverá tomar muito cuidado ao soldar os componentes polarizados como capacitores eletrolíticos, transistores, circuitos integrados, etc., a fim de evitar soldá-los invertidos. Para os Cls utilize soquetes para facilitar manutenções futuras. Os transistores requerem radiador de calor para operação com motores com dreno de corrente superiora 500 mA. A instalação dos mesmos é recomendável, mesmo para motores de baixa corrente. Isso aumentará a vida útil dos transistores e também permitirá o uso com variados motores sem preocupações.
Comece por soldar os resistores, depois capacitores, soquetes para Cls e por último os transistores. Somente depois da placa montada, insira os Cls em seus respectivos soquetes. Tome cuidado para não inverter as posições dos mesmos e nem os ligar invertidos (pinagem).
Os conectores empregados para entrada do microcontrolador, ligação dos motores e alimentação são do tipo parafusáveis, mas poderiam ser do tipo "barra de pinos". O leitor deverá utilizar aquele que tiver em mãos. Na falta desses, a solução é soldar diretamente os fios de ligação a placa.
Os LEDs D1 e D2 indicam as tensões presentes na placa: pilhas e 5 volts, respectivamente.
Os suportes de pilhas podem ser para pilhas pequenas, médias ou grandes. A escolha das mesmas deve ser feita de acordo com o consumo dos motores, número dos mesmos, tipo do projeto, tempo de operação desejado, etc. De qualquer forma a dica é optar por pilhas preferencialmente alcalinas, que têm um tempo de vida mais longo. As pilhas médias podem fornecer uma corrente elétrica maior por um tempo também maior, se comparadas às pilhas pequenas e dependendo do projeto são a escolha mais viável.
PROVA E USO
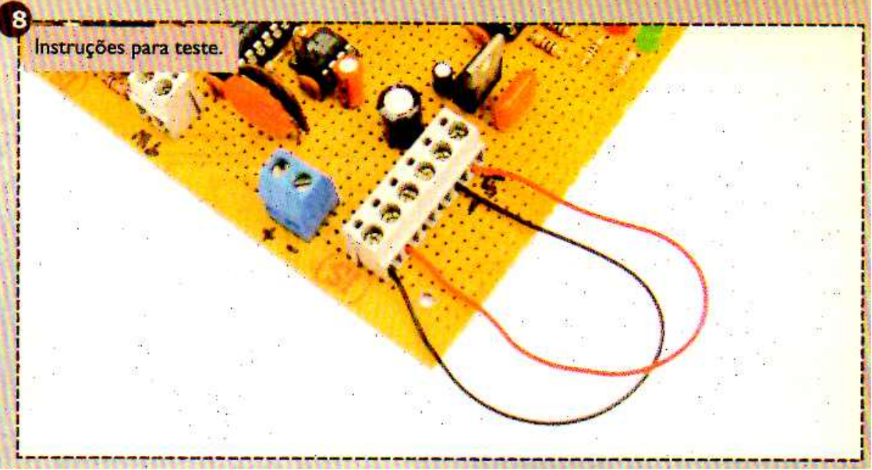
Para provar a placa o leitor não precisa necessariamente de um microcontrolador (figura 8). Insira as pilhas para alimentar o circuito. Posicione P1 e P2 em meio curso. Prenda um fio no "terra" e outro nos 5 V, ambos presentes no conectar de entrada. A habilitação é feita com nível lógico "0" e a direção é feita com "1" (5 volts DC) para um sentido e "0" para o outro. Ligue o fio com nível "0" (terra) no ponto de habilitação do motor a ser testado. Ligue o fio com nível lógico "1" (5 V) no ponto de sentido do motor. Ligue S1 e verifique o giro do motor. Regule a velocidade desejada do motor através do trimpot" adequado (P1 ou P2). Para inverter o sentido basta ligar um fio com nível °0" no ponto de controle de sentido. Lembre-se de desligar o nível "1" deste ponto, caso contrário você irá realizar um curto e danificar a placa!!! Teste o outro motor da mesma maneira.
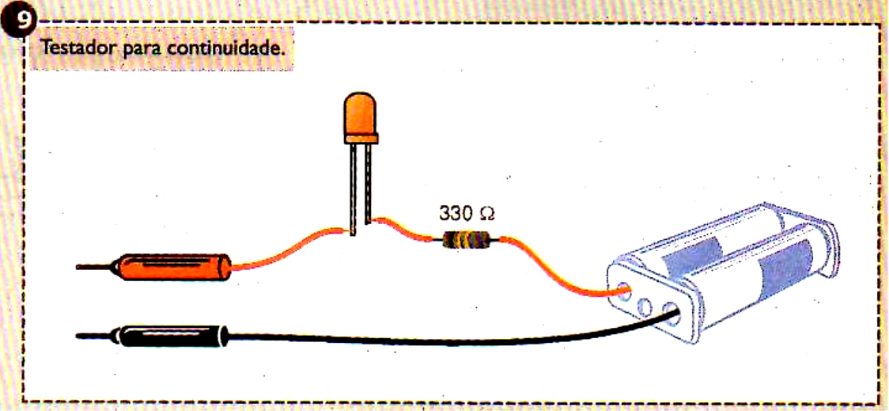
Nota: Caso algo não tenha saído exatamente como o esperado, não se desespere. Faça uma verificação minuciosa no circuito. Procure por soldas frias, ligações invertidas, possíveis curtos etc. Teste as ligações de acordo com o circuito utilizando um multímetro ou testador de continuidade (figura 9). Com atenção será possível encontrar pequenos problemas que nos passaram despercebidos durante uma das etapas da montagem.
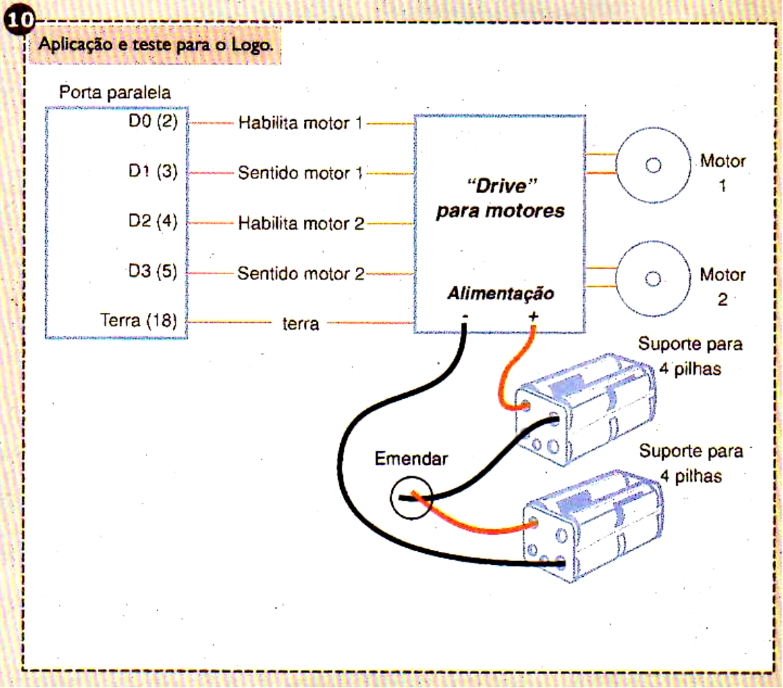
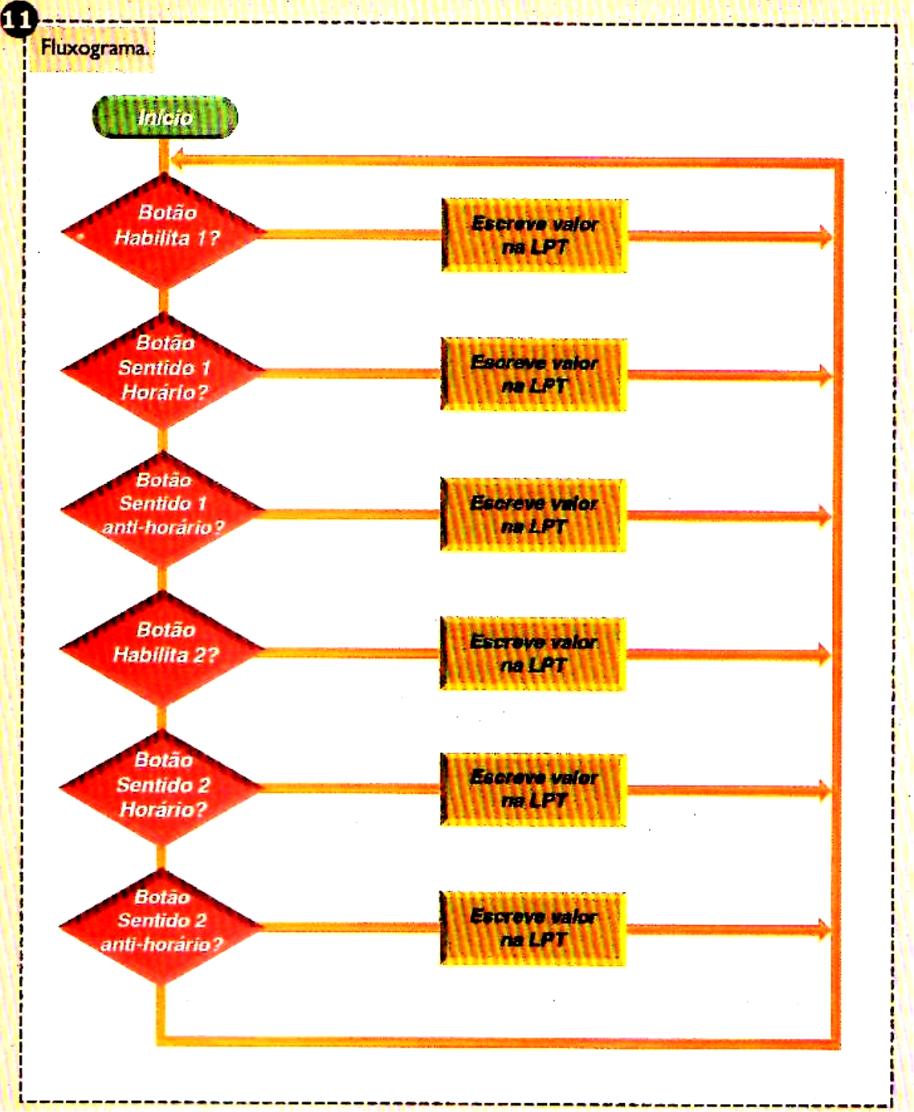
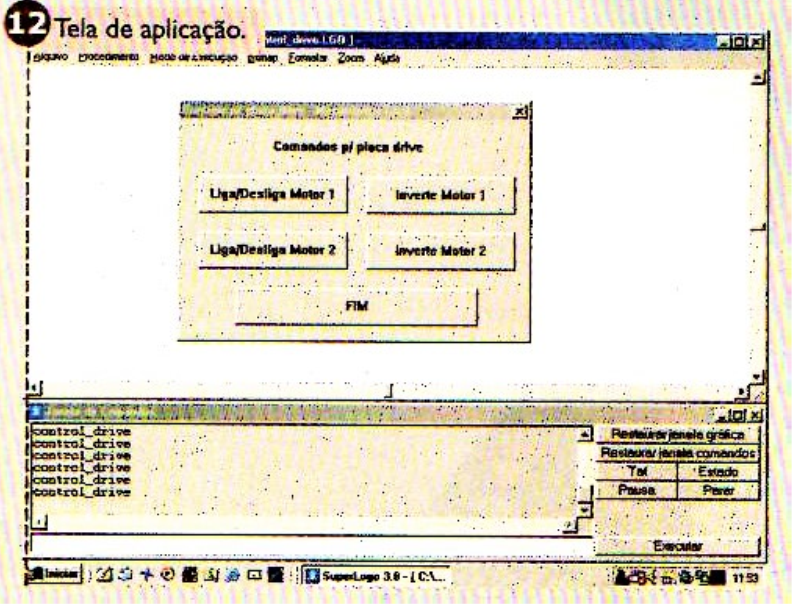
Para testar utilizando um microcontrolador, basta aplicar as saídas deste à placa. Os dados devem ser passados de acordo com o que se deseja dos motores. Na figura 10 temos um exemplo de aplicação interessante, utilizando o LOGO para controlar dois motores. Com esse circuito podemos utilizar nosso PC para controlar dois motores de forma simples e segura. . A figura 11 mostra o "fluxograma para auxiliar na compreensão do seu funcionamento e na figura 12 o leitor tem a tela do programa.
CONCLUSÃO
Como podemos notar por este artigo, a "placa drive" é muito simples de operar e usar. Ela poderá ser utilizada em vários projetos como pequenos robôs, braços mecatrônicos etc. E seu uso não está restrito apenas à utilização com microcontroladores, podendo ser operada através de circuitos com lógica digital simples, PCs etc. E, nesta edição, demonstraremos mais um exemplo de uso: ela será aplicada em nosso Robô IR apresentado na capa. Boa montagem e ideias de uso!








