









Já pensou em montar um robô que execute, através de comandos sonoros, três tarefas diferentes, que associadas entre si permitirão o controle total de direção deste? Um robô que possa participar de provas de obstáculos e outras? Este é o robô 5-CARGO.
Márcio José Soares
https://www.arnerobotics.com.br/
Nota: O artigo saiu numa Mecatrônica Fácil de 2003. Reproduzido com a permissão do autor.
O S-CARGO é uma excelente maneira para conhecer o mundo da microrobótica. Ele pode ser montado por estudantes, hobistas e professores. Os usos e objetivos podem ir desde o simples prazer de uma montagem até mesmo a aplicação de conceitos mecânicos e eletrônicos em sala de aula, auxiliando na aprendizagem de técnicas importantes necessárias em Mecânica assim como em Eletrônica.
COMO FUNCIONA
O circuito completo do S-CARGO é demonstrado na figura 1. Podemos dividi-lo em 4 etapas. Na figura 2, o leitor tem o diagrama de blocos do funcionamento do mesmo.
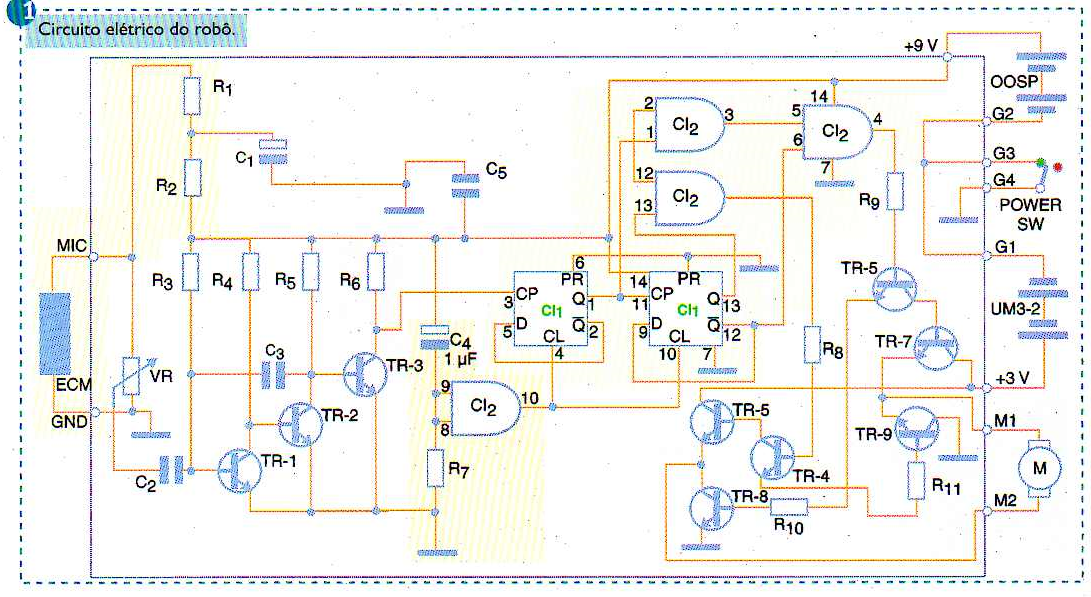
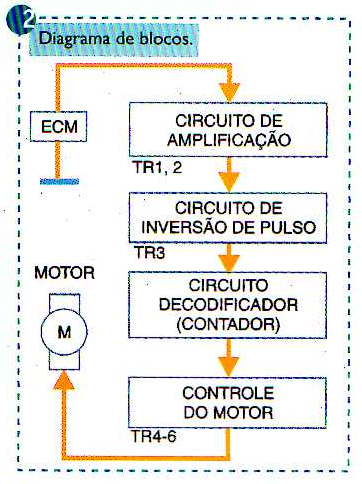
Nas regiões amarela e azul temos o circuito de amplificação e aplicação para um único pulso. A entrada desta etapa (amarelo) é feita com um microfone de eletreto. Sua saída é levada a um circuito amplificador (azul). Ao mesmo tempo em que o circuito amplifica o sinal, ele cria um único pulso quadrado para a próxima etapa.
Assim, na próxima etapa (regiões rosa e verde) temos o circuito responsável pela inversão do pulso formado apenas pelo transistor TR-3 (rosa). A saída desse circuito é entregue a um contador binário de 2 bits, implementado com 2 flip-flops tipo "D" (verde).
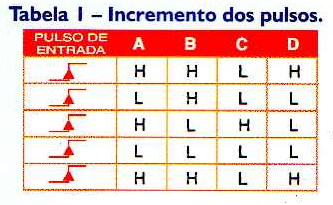
Esse contador, a cada pulso de entrada é incrementado de 0 a 3, voltando a zero no final de sua contagem conforme demonstrado na tabela I.
Após a etapa decodificadora (contador), temos então a aplicação dos níveis lógicos C e D da tabela I no circuito de controle do motor (drive). Na região lilás o leitor tem o esquema do mesmo, e demonstraremos o sentido da corrente elétrica no motor em situações diferentes.
Se a saída C do circuito contador for igual a "I" lógico (+Vcc), e D igual a "0" lógico (terra), os transistores TR-6, TR-4 e TR-9 entrarão em condução girando o motor em um sentido. Já se os valores se inverterem em C e D, os transistores TR-7, TR-5 e TR-8 entrarão em condução, girando agora o motor em sentido contrário. Quando ambas as entradas forem iguais ao nível lógico "1", nenhum transistor conduzirá, mantendo o motor parado.
Uma última etapa (região laranja), mas muito importante, é a etapa para "resetar" o contador sempre que o robô for ligado. Assim teremos certeza que nosso contador começará pelo zero.
MONTAGEM
Para montagem, o leitor irá precisar de algumas ferramentas:
- Alicate de bico
- Alicate de corte
- Chave tipo Phillips n°2 e n°3
- Martelo pequeno ou alicate universal
- Estilete - Limas finas
- Ferro de solda 30 ou 40W
- Solda.
Montagem eletrônica
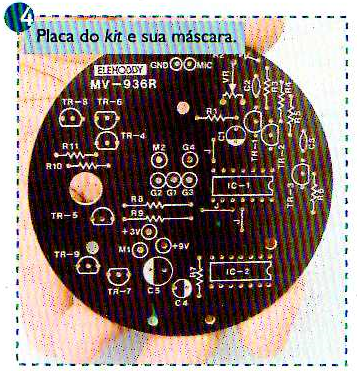
A montagem eletrônica não oferece muitas dificuldades. O leitor deverá tomar apenas certos cuidados com relação aos componentes polarizados tais como capacitores eletrolíticos, transistores, circuitos integrados, etc. Porém a placa fornecida junto ao kit (figura 4) ajudará nesta tarefa, pois todos os componentes estão identificados na "máscara" do lado dos componentes assim como sua correta posição.
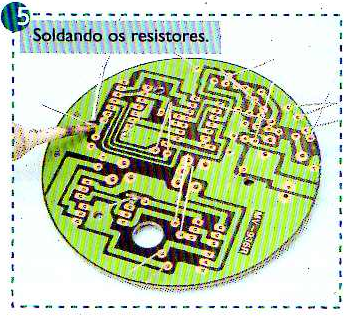
Comece soldando os componentes não polarizados (figura 5): resistores (R1 a R11), capacitores cerâmicos (C2 e C3) e o trimpot (VR). Veja seus respectivos valores na lista de materiais. Tenha muita cautela ao soldar os resistores.
Use a lista de componentes como referência para não trocar um resistor por outro, o que poderia fazer com que seu robô não funcionasse corretamente.
Após a montagem dos componentes não polarizados, chegou a hora de montar os capacitores eletrolíticos (C1, C4 e C5) e transistores (TR1 a TR9). Observe que esses componentes são polarizados. Os capacitores eletrolíticos possuem um terminal positivo e outro negativo, sendo que este último está identificado na placa com uma "meia-lua", preenchida. Os valores de C1 e C4 também são diferentes. Consulte a lista de materiais para não os trocar durante a montagem.
Os transistores, além de polarizados, são fornecidos com códigos diferentes. Na máscara, eles são marcados como se o leitor o observasse de cima. Tome precaução para não inverter nada durante esta parte da montagem.
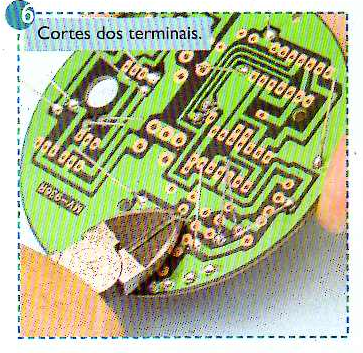
Corte as sobras dos terminais na parte inferior da placa (figura 6). Nesta tarefa o leitor deverá ter muito cuidado. Procure virar a placa para o lado contrário de seu rosto. O corte, dependendo do alicate utilizado, pode fazer o terminal ser disparado em grande velocidade, e se a placa estiver voltada para o rosto, um acidente grave poderá ocorrer. Se o leitor não se sentir seguro nessa tarefa, peça a ajuda de uma pessoa mais experiente.
Na placa existem marcações como M1, M2, G1, G2, G3, G4, +3V e +9V. Estes pontos receberão os terminais fornecidos com o kit. Eles não são polarizados e todos são iguais. Além destes pontos, o leitor encontrará outros três pontos marcados com "J". Trata-se de jumpers. O leitor poderá prepará-los a partir das sobras dos terminais cortados com o uso de um alicate de bico.
Dobre o terminal em forma de "U" de maneira que ele possa ligar um ponto a outro.
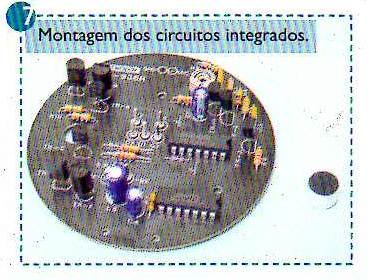
Já podemos soldar os circuitos integrados Cl1 e Cl2. Muita cautela para não os inverter na placa. Use a marca no circuito integrado (meia-lua ou chanfro) e a marca na máscara da placa (assemelha-se ao circuito integrado, visto por cima). Outro cuidado é para não trocar Cl1 por Cl2 e vice-versa. Eles têm o mesmo número de pinos e se assemelham bastante. C11 é um 4013 e Cl2 um 4081. Trocá-los fará com seu robô não funcione. Tenha atenção neste ponto (figura 7).
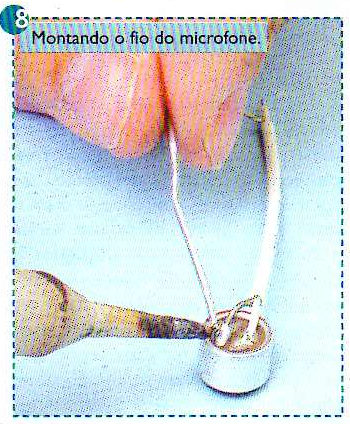
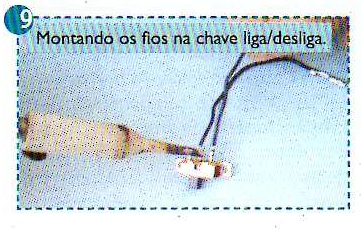
Monte o microfone conforme a figura 8. A malha do fio vai ligada ao terminal do microfone que se conecta à carcaça do mesmo. Monte também os fios pretos à chave de liga/desliga do robô (figura 9). Solde o fio do microfone a placa. A parte interna branca deverá ser ligada no furo com a legenda MIC e a malha na legenda GND. Parafuse a chave utilizando os parafusos com porcas tipo M3 fornecidos no kit.
Após todas as ligações, confira atentamente se todos os componentes foram ligados corretamente. Reveja as soldas atrás de possíveis curtos e ou soldas "frias". Uma boa verificação nesse momento poderá ajudá-lo a evitar problemas de funcionamento.
Montagem mecânica
Assim como a montagem eletrônica, a montagem mecânica não oferecerá grandes dificuldades se o leitor seguir atentamente as dicas apresentadas aqui e no manual.
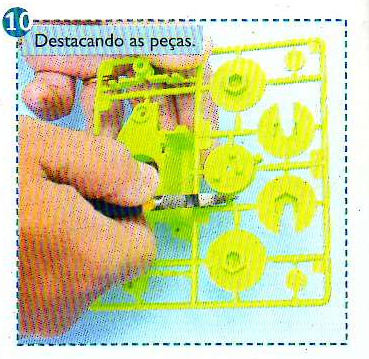
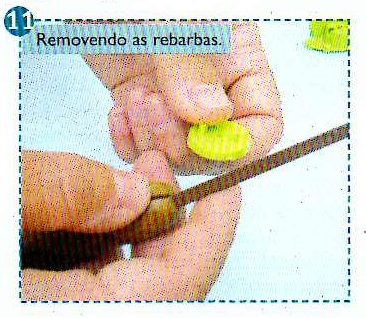
Comece por destacar usando o alicate de corte nas peças plásticas, conforme demonstrado na figura 10. Com o auxílio de uma lima fina, retire as rebarbas que ficaram após o corte (figura 11).
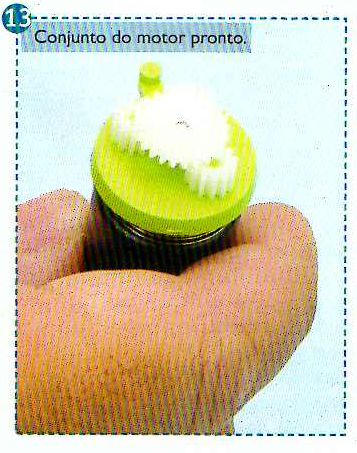
Iniciaremos montando o conjunto do motor. O leitor deverá unir a peça C ao motor, mantendo a mola fornecida no kit entre eles (figura 12).

Agora, deverá inserir três pinhões na peça C. Também será utilizada uma engrenagem pequena. Ela é única e pode ser facilmente identificada no conjunto de engrenagens. Essa peça será ligada ao eixo do motor e deverá entrar sob pressão. Para isso, o leitor deverá virar todo o conjunto de ponta cabeça, tomando cuidado para que as peças não caiam. Apoie a engrenagem em uma superfície lisa e com o auxílio de um martelo ou um alicate universal, bata no eixo do motor para que a peça possa encaixar-se. Durante esta operação, o eixo deverá estar o mais reto possível em relação ao furo da engrenagem, evitando que o encaixe fique torto, o que poderia impedir o giro livre das engrenagens. A figura 13 exibe o conjunto pronto.
Então, podemos inserir o motor em sua base conforme demonstrado na figura 14.

Após a montagem do motor, podemos partir para a montagem do conjunto eixo-roda. O eixo deve ser passado pela peça B e preso a uma coroa com dentes em 90°. Esses conjuntos são de fácil identificação, pois foram fornecidos apenas dois pares. Aqui, também, o leitor utilizará um martelo ou alicate universal para prender a engrenagem ao eixo. Apoie a engrenagem em uma superfície lisa, centralize o melhor possível o conjunto e bata levemente para a peça encaixar-se.
Lembre-se que deve haver uma pequena folga para que tudo gire livremente e sem atritos. Na figura 15 o leitor tem a peça já montada.

A montagem final da roda pode ser vista na sequência das figuras 16 a 18.



Agora vamos preparar a base. Comece inserindo os pinhões e, em seguida, monte nas engrenagens grandes e no final as engrenagens médias. Após a montagem o conjunto deverá ficar como mostra a figura 19.

Parafuse a base do motor à base do robô tomando precaução para que nenhuma peça se desloque nesse momento.
Monte os eixos com as rodas à base (figura 20). Ligue o fio amarelo e o fio laranja ao motor. Os conectores possuem lado correto para a ligação (figura 21).


MONTAGEM FINAL
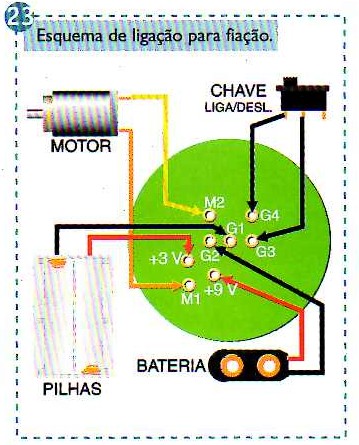
No momento em que temos a base e placa montadas, podemos unir as partes. Coloque o suporte de pilhas e o clipe para bateria de 9 V na base do robô (figura 22). Passe os fios pelo furo na placa e ligue-os na mesma, tomando cuidado para não inverter nada. A figura 23 poderá orientá-lo melhor com relação as ligações.

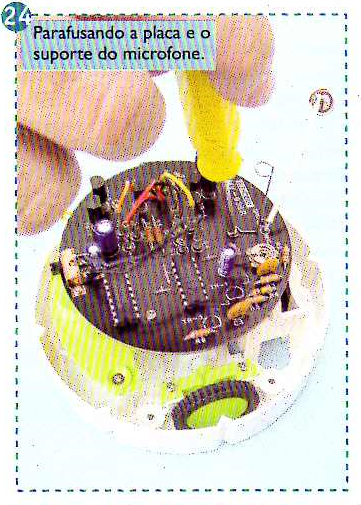
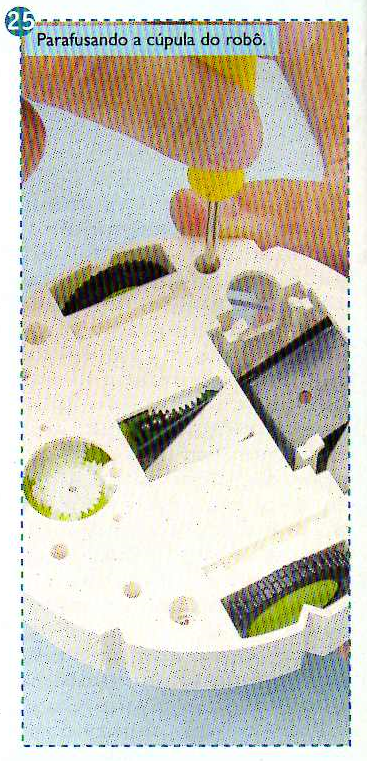
Parafuse a placa e o suporte do microfone à base do robô (figura 24). Parafuse a cúpula do robô (figura 25), insira as pilhas e bateria. A bateria será presa por encaixes presentes no chassi do robô e será responsável por prender o suporte de pilhas. O robô montado e pronto para os testes, pode ser visto na abertura desta matéria.
PROVA E USO
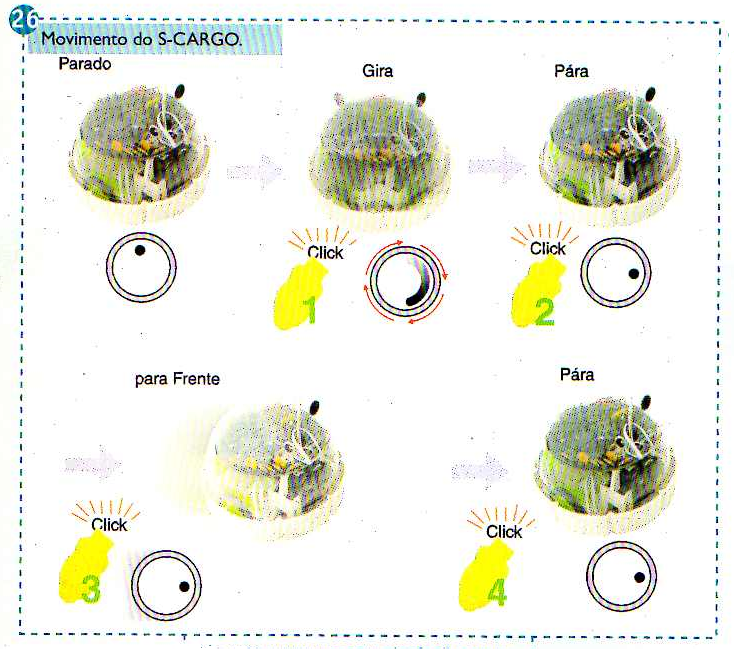
Para testar o circuito, insira as pilhas e bateria. Ligue o robô e use o "SNAP" fornecido com o kit. Uma dica importante é a seguinte: ao apertar o SNAP, não o solte: Se isso acontecer, você terá dois pulsos e o robô executará os passos de maneira muito rápida e até imperceptível. Lembre-se também que o S-CARGO pode ser controlado pelo estalar dos dedos, bater de palmas ou até mesmo dos pés.
Um dique fará com que seu robô ande para frente. Um outro dique fará com ele pare. Mais um dique o colocará em giro, e um outro fará com ele pare novamente. Esta é a sequência de controle de seu robô. Ela, apesar de muito simples, permite que você o posicione em vários pontos de uma sala com muita facilidade.
IDEIA PARA PROVA
O leitor poderá criar várias provas entre amigos. Uma delas e muito interessante consiste em criar um campo com obstáculos com uma entrada e uma saída. A ideia é chegar ao outro lado sem tocar em nada. Poderá ainda estabelecer regras como uma pontuação negativa para cada obstáculo. Assim, o leitor poderá convidar os amigos para um desafio, vencendo aquele que chegar ao outro lado com um valor próximo ou igual a zero.
CONCLUSÃO
Como pudemos ver nesta matéria, é possível aprender mesmo com a montagem de um kit comercial. Após executá-la, as habilidades "mecatrônicas" do leitor estarão, sem dúvida alguma, mais desenvolvidas e prontas para os próximos desafios. Boa montagem e diversão!!








