









Este artigo é de 2003, tendo escrito originalmente para ser controlado por um PC. No entanto, a mesma estrutura básica pode ser elaborada atualmente e o circuito adaptado para operar com microcontrolador. Com isso temos um projeto “maker” bastante atual (2016) que pode ser implementado com componentes comuns de baixo custo. Trata-se de um animatrônica, uma cabeça que se move e até pode falar controlada por PC ou microcontrolador.
Depois de vários artigos introdutórios e de montagens simples, apresentamos neste artigo uma montagem bem sofisticada de uma "cabeça mecatrônica ” com vários movimentos realizadas através de servomotores. Luiz Henrique Corrêa Bernardes/Marcio José Soares (Publicado com autorização de Luiz Henrique Corrêa Bernardes)
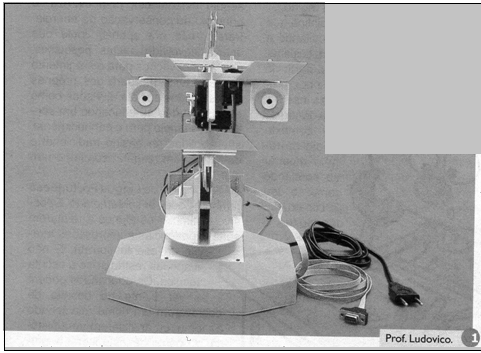
O “professor Ludovico” (figura 1) é a evolução do projeto Tubotron (figura 2) que iniciamos há alguns artigos anteriores, sua sofisticação está nos vários servomotores que fazem os acionamentos de vários movimentos:
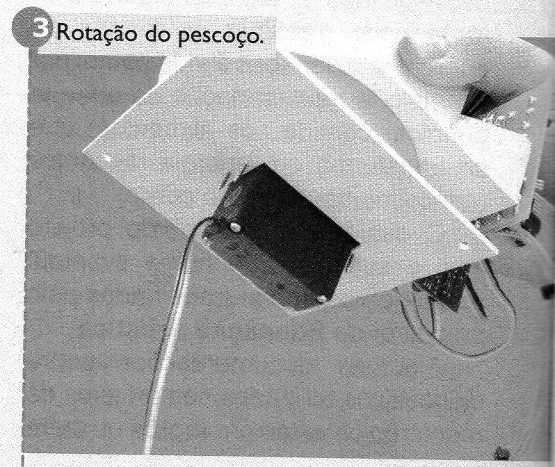
1- Rotação do pescoço;
2- Abre/Fecha Boca;
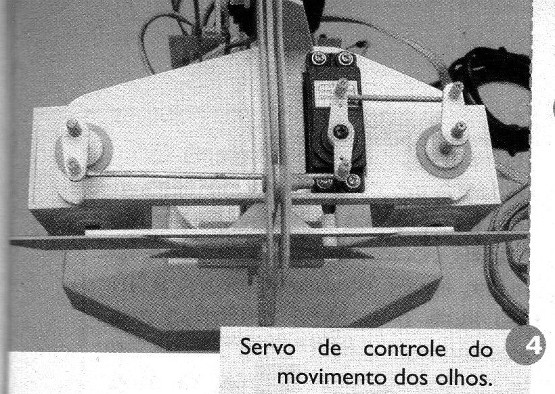
3- Move os olhos para a direita/esquerda;
4- Abaixa/Levanta a cabeça;
5- Abaixe/Levanta a sobrancelha.
Os materiais utilizados podem ser:
plástico;
madeira;
papelão;
plástico poliondas (pastinha);
ou a miscelânea de vários materiais.
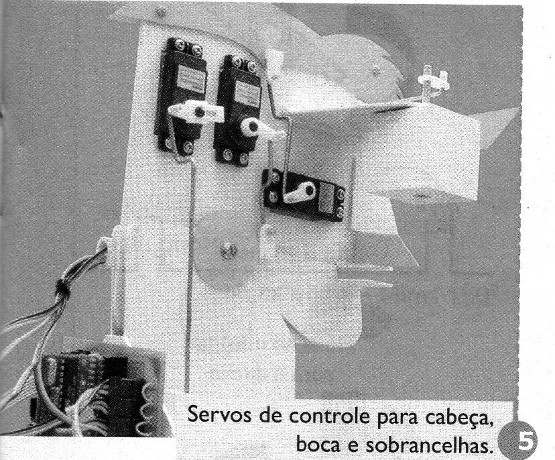
Observe nas figuras 3 a 5 a localização de cada servomotor.
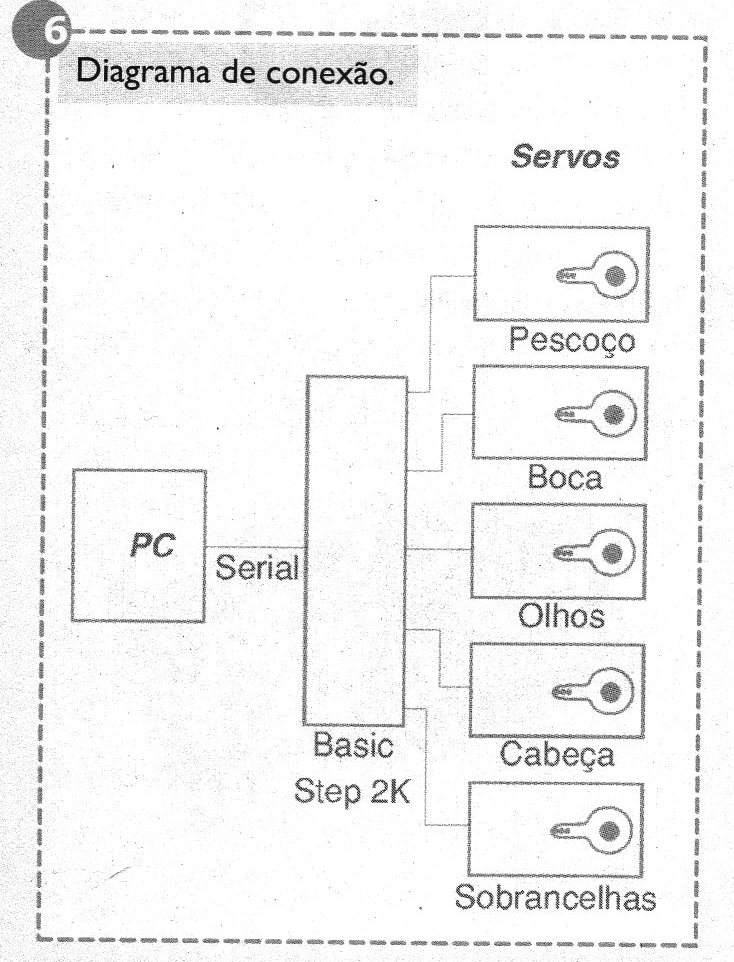
O sistema de acionamento dos cinco servos é feito através de um microcontrolador Basic Step 2K, da Tato Equipamentos Eletrônicos (2003) que, por sua vez, está conectado ao PC através da porta serial. Um programa em LOGO envia os dados para o Basic Step 2K para posicionar os servos.
A figura 6 mostra o diagrama de conexão.
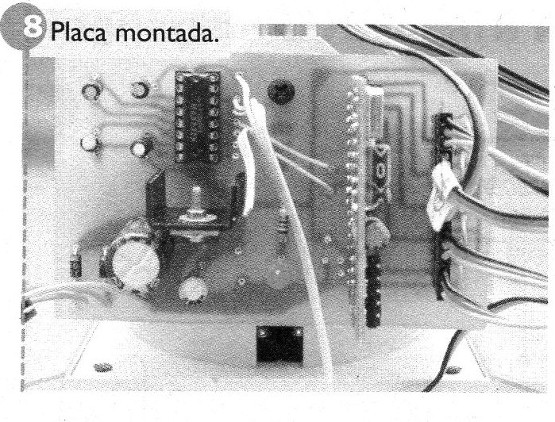
Vamos utilizar o esquema elétrico da figura 7 que resulta em uma montagem que pode ser observada na figura 8.
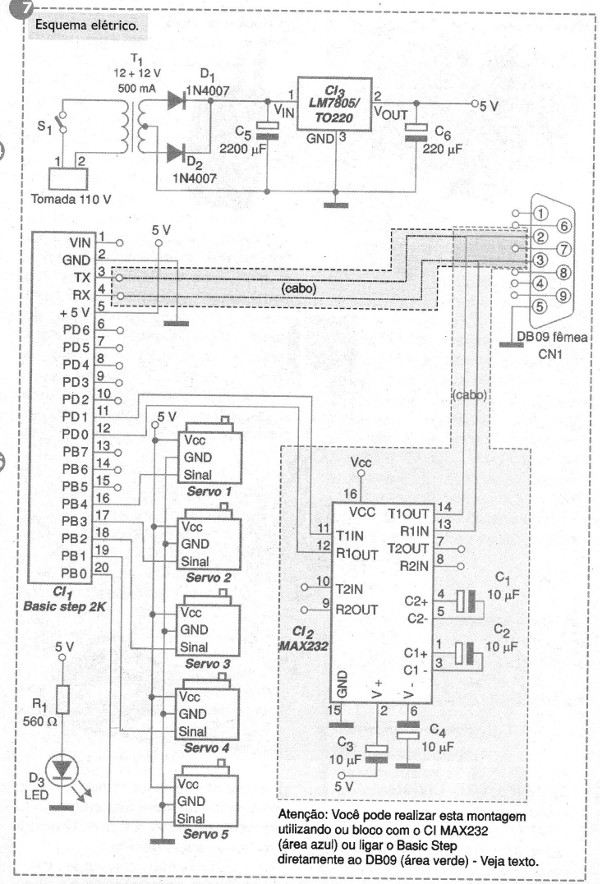
Note que utilizamos poucos componentes, basicamente o que foi feito no projeto do Tubotron com servo. Adicionamos uma fonte de +5 V que substitui o conjunto de pilhas.
Veja que temos que dimensionar fonte para uma corrente superior à consumida pelo conjunto de servos.
Caso essa fonte não consiga fornecer a corrente necessária, ocorrerá o mau funcionamento do Basic Step 2K e dos servos.
A montagem foi feita em placa de circuito impresso, mas o leitor também poderá montar o circuito em uma matriz de contatos para teste, se desejar.
O leitor deve ter notado que o layout foi dividido em 3 partes. A primeira parte, com inscrição A refere-se à parte de controle, onde está o Basic Step 2K e os servos. A parte B refere-se ao drive de comunicação entre o PC e o Step 2K.
Ele está presente para equiparar os níveis de tensão RS-232 (+12V e -12V) com os níveis de tensão do Step 2K (+5 V e O V). Esta parte da placa poderá ser excluída, e mais a frente o leitor encontrará informações de como fazê-lo.
A terceira e última parte, referenciada pela letra C trata de uma fonte propriamente dita. Em nosso protótipo optamos por montar uma. Porém, o leitor poderá utilizar uma pequena fonte externa que ofereça uma tensão de 5 VDC regulados com corrente mínima de 500 mA.
Não use fontes com tensões superiores a 5 VDC, pois isso queimará tanto o Basic Step2K quanto os servos! Na dúvida, opte pela montagem da fonte!
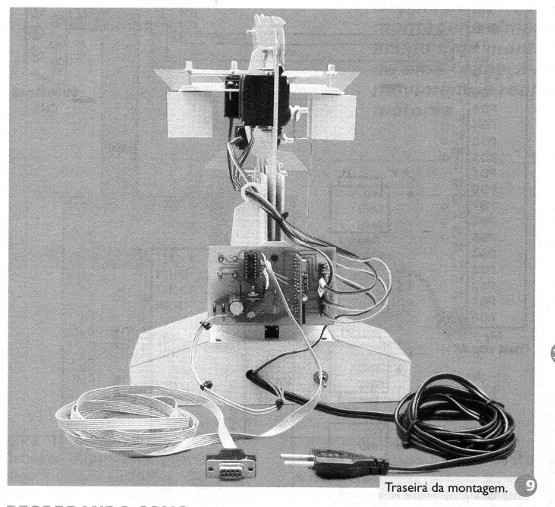
No nosso protótipo, alojamos o transformador internamente na base do animatrônico e também inserimos a chave S1. A traseira da montagem com os fios de saída do transformador, assim como o “rabicho” de alimentação do mesmo, a chave S1 e o cabo de comunicação com o PC estão demonstrados na figura 9.
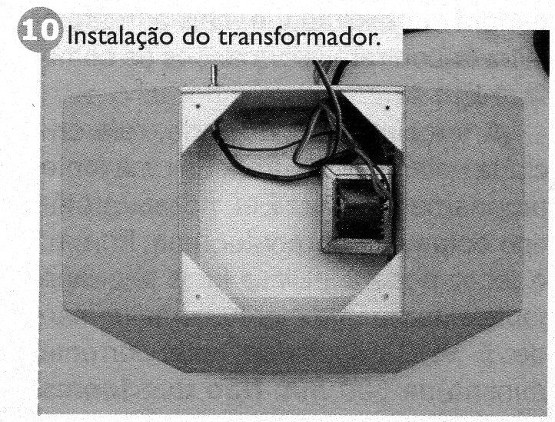
Na figura 10 o leitor visualiza a instalação do trafo.
Recordando como funciona um servo:
Esse assunto já foi bem explorado em outras artigos deste site, mas resumidamente podemos dizer que o servo típico tem 3 fios de conexão sendo dois de alimentação (+5 V e GND) e um de sinal.
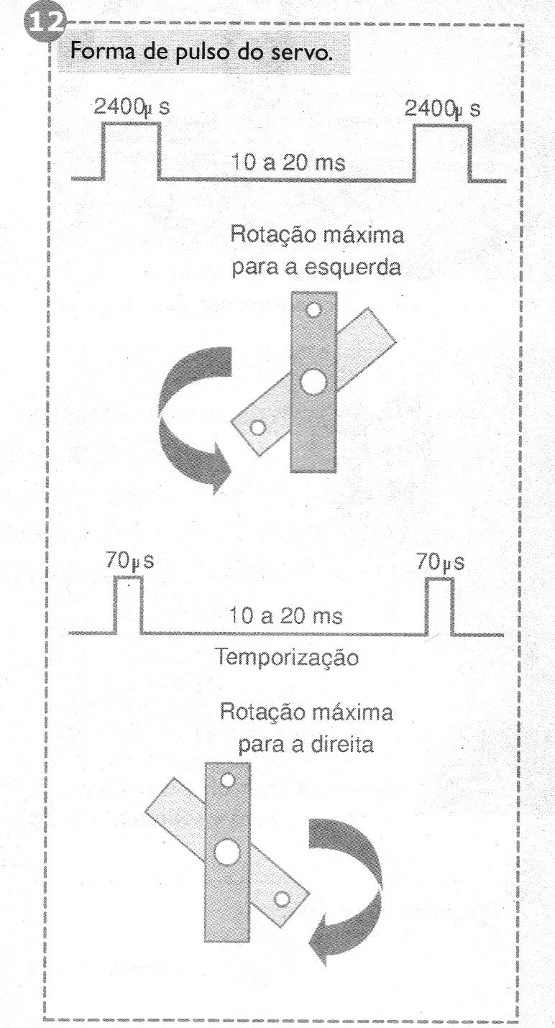
O posicionamento do servo é proporcional a largura de pulso gerada no pino de sinal.
Ou seja, se enviarmos um pulso com largura de 70 microssegundos, o servo irá girar todo para direita e, caso o pulso tenha 2400 microssegundos de largura, o servo irá girar todo para esquerda.
Entre cada pulso enviado, existe um “espaço” de 20 milissegundos para sincronismo. Para posicionar o servo em outras posições basta alterar proporcionalmente esses tempos. Esses tempos podem variar dependendo do fabricante do servo, a figura abaxo ilustra a forma de pulso gerada.
O LOGO não consegue gerar esses pulsos com precisão na porta paralela, então para acionar os servos necessitamos de um dispositivo adicional entre o PC e o servo.
Há no mercado placas de controle de servos, algumas simples e outras mais sofisticadas. Decidimos utilizar um Basic Step 2K (figura abaixo) devido a muitos leitores já o terem usado em outros projetos e por sua facilidade de programação.
O compilador e a documentação do Basic Step 2K estão disponíveis gratuitamente na área de download do endereço www.tato.ind.br. A documentação está em inglês, sendo completa e bem detalhada com mais de 400 páginas. O compilador BASCOM consegue gerenciar até 16 servos utilizando a Interrupção do TIMER 0.
O Basic Step 2K também pode ser conectado diretamente a porta serial do PC depois de soldados os pinos de TX e RX na parte de trás da placa do mesmo. Para isso veja o Box no final do artigo com as informações necessárias para tal.
Caso o leitor opte por esta configuração, a parte da montagem com o CI2 (MAX232) e os capacitores C1, C2, C3 e C4 (área azul) não será necessária.
Porém, os pinos de à entrada e saída dos dados serão trocados. O leitor deverá ligar o pino 3 do Basic Step diretamente ao pino 3 do conector DBOQ e o pino 4 diretamente ao pino 2 do mesmo conector.
Lembre-se apenas de manter o pino 5 do conector ligado a um ponto de terra da placa. Na figura 7 o leitor encontrará este novo esquema de ligação (área verde).
Protocolo de Comunicação
O protocolo de comunicação entre o PC e o Basic Step 2K, é composto de 3 bytes: um de sincronismo (avisa para o Basic Step quando o PC está enviando. um comando para o Servo), outro de indexação do servo (número do servo) e por último a posição do servo (pode variar de 0 a 255). Veja a figura 13.
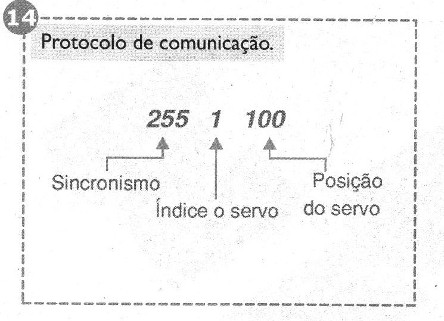
Notar que os índices dos servos estão distribuídos da seguinte maneira:
1 - Rotação do pescoço;
2 - Abre/Fecha boca;
3 - Move os olhos para a direita/esquerda;
4 - Abaixa/Levanta a cabeça;
5 - Abaixa/Levanta a sobrancelha;
Abaixo, seguem os comandOs para levantar a cabeça e fechar a boca:
255 4 150
255 2 010
Observe que as posições utilizadas são meramente ilustrativas, elas dependerão. de ajustes que veremos mais adiante.
LISTAGENS DOS PROGRAMAS
Na época em que o artigo foi escrito havia um site que disponibilizava estas listagens. Infelizmente, ele não existe mais, o que significa que os leitores devem desenvolver seus próprios programas.
Aconselhamos consultar a documentação do compilador BASCOM e do ambiente do LOGO, para que se possa sanar qualquer dúvida em relação às instruções utilizadas.
Lembre-se que o ambiente do LOGO utilizado é o SuperLogo do Nied, comndown/oad gratuito através do site www.nied.unicamp.br.
LIGANDO O SISTEMA
Ligue e programe o Basic Step 2K com o programa Luduvico.bas, conecte o sistema através da serial ao PC e execute o programa Luduvico.lgo em LOGO, que deve apresentar a tela ilustrada na figura abaixo.
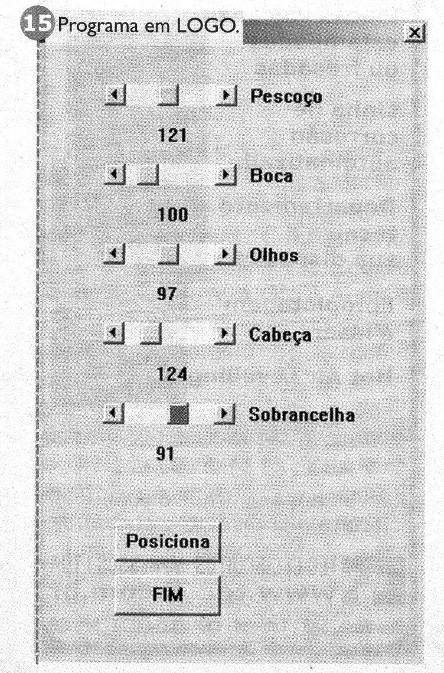
Nesse momento ainda não iremos ligar os servos, os quais iremos conectar servo a servo e fazer ajuste mecânico e de software.
AJUSTE MECÃNICO E DE SOFTWARE DOS SERVOS
Os servos têm um deslocamento angular de aproximadamente 270 graus (figura abaixo), o que em alguns movimentos e muito grande, podendo ocasionar quebra do nosso animatrônico ou do servo.
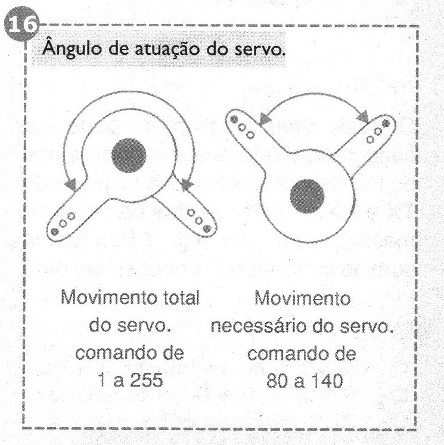
Para que isso não aconteça, temos que fazer o ajuste mecânico dos servos com eles desligados, acionando-os com a mão e fazendo o percurso do movimento.
Estes ajustes são feitos com o reposicionamento da alavanca do servo, de acordo com o movimento desejado. Feito isso, estaremos prontos para energizar o servo e controla-lo pelo LOGO e realizar os ajustes de software. Esses ajustes são feitos no programa do LOGO como o exemplo dado no quadro abaixo.
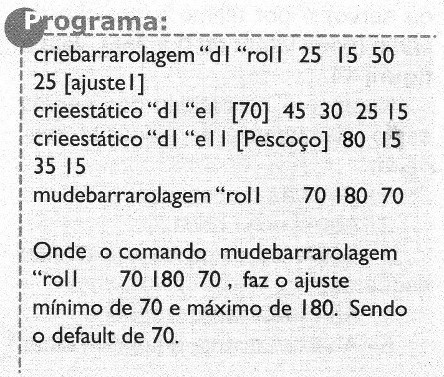
O mesmo é feito para os outros 4 servos. Veja que os ajustes foram feitos para o nosso protótipo e que podem variar de montagem a montagem. Cabe a leitor encontrar o melhor ajuste mecânico e de software para o seu animatrônico.
Após encontrar o melhor ajuste, modifique o programa do Basic Step com os ajustes defau/ts (mínimos) encontrados para a montagem.
Servo(1) : 70
Servo(2) : 100
Servo(3) : 85
Servo(4) : 110
Servo(5) : 82
Uma vez concluído, podemos acionar o programa LOGO e verificar os movimentos. É muito interessante visualizar os vários movimentos ocorrendo simultaneamente.
O Basic Step 2k
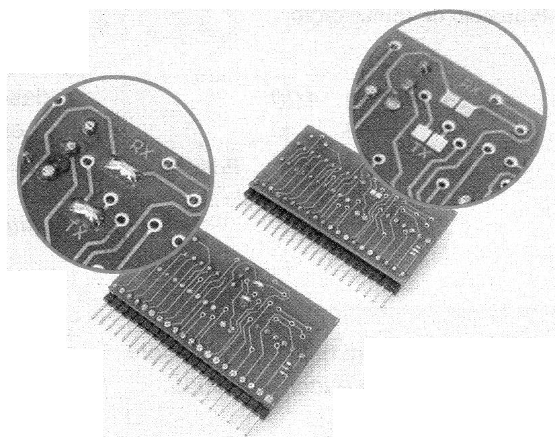
O Basic Step 2K possui internamente recursos para comunicação serial, através dos pinos RX e TX, que são ligados aos pinos PD0 e PD1, respectivamente. Estes recursos permitem adaptar o sinal em nível TTL para níveis compatíveis com os sinais RS-232 dos PCs.
Porém, para isso, é necessário realizar uma pequena adaptação no Basic Step. Na parte traseira A; do mesmo há quatro pequenas ilhas, montadas duas a duas com as inscrições TX e RX. É preciso, com o auxílio de um ferro de solda, curtocircuitar estas ilhas conforme demonstrado na figura.
Alertamos que esta operação é bastante delicada, sendo fundamental tomar certos cuidados, principalmente com o ferro a ser utilizado. Alguns ferros de solda não possuem um bom isolamento em suas pontas.
Para testar o isolamento do seu ferro de solda, ligue-o na tomada e, com o auxílio de uma pequena lâmpada néon, segure em uma das pontas dessa lâmpada e encoste a outra na ponta do ferro.
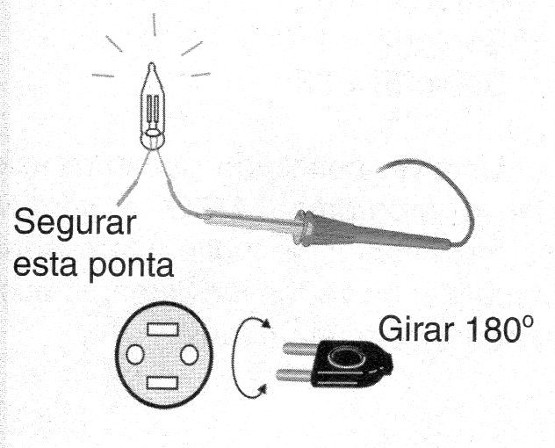
Se a lâmpada acender, é sinal de isolamento fraco e o procedimento é o seguinte: gire 180º os pinos da tomada do ferro de soldar e refaça o teste. Se o problema persistir, não use este ferro para as ligações.
Tenha em mente que alguns ferros podem apresentar uma fuga de tensão mais fraca, incapaz de acender a lâmpada, mas capaz de danificar o STEP. O leitor só deverá optar por ligar as trilhas se tiver total certeza da isolação do seu equipamento e também total segurança no que irá fazer.
CONCLUSÃO
Este artigo ilustra como podemos executar montagens complexas, mas lembre-se que começamos com montagens bem simples como a do Tubotron.
O leitor poderá adaptar o Prof. Ludovico para ter movimentos adicionais, bastando para isso colocar mais servos.
Devido ao custo de montagem o leitor poderá fazê-lo em etapas, onde montará toda a mecânica e colocará um servo de cada vez.
Boas montagens e até a próxima!
CI1 -Basic Step 2K - microcontroladorTato
Cl2 - MAX232 - Line Driver para RS-232
CI3 - 7805 - regulador voltagem 5 volts, encapsulamento TO-220
D1, D2 - 1N4007 - diodos retificadores
D3 - LED vermelho redondo (tipo comum 5mm)
Resistores
R1 - 560 ohms (verde, azul, marrom)
Capacitores
CI, C2, C3, C4 - 20 uF x 25V - eletrolítico
C5 - 2200 uF x 35V - eletrolítico
C6 - 220 uF x 25V - eletrolítico
Diversos
SRV1 a SRV5 - servo “standard” para aeromodelo
T1 - Transformador 12 V + 12 V x 500mA
S1 - Chave liga desliga
CN1 - conector DB09 fêmea
1,5 metros de cabo flat com 6 vias ou mais
Placa de circuito impresso
Rabicho para ligação na rede CA
Uma barra com 15 pinos para ligar os servos
Radiador de calor para TO-220
Fios para ligação










