Todo projeto eletrônico - sobretudo em Internet das Coisas - começa com protótipos e provas de conceito. Estes têm como utilidade a verificação prática da ideia proposta para um futuro produto, sendo muito importante para se definir a viabilidade (técnica e comercial) do almejado produto eletrônico. No mundo maker em IoT isso não é diferente. Em grande parte do tempo, os makers estão envolvidos com a concepção de protótipos para testar e validar se suas ideias podem ser aplicadas na prática em algo comercial.
Dica de leitura

Todo protótipo (ou, futuramente, produto eletrônico) envolve três grandes tarefas: ler dados do ambiente a sua volta; processar tais dados segundo um algoritmo pré-estabelecido; devolver uma resposta com uma ou mais informações, com algo válido para o usuário (na forma de uma mensagem, som ou sinal luminoso, por exemplo) ou para outros sistemas eletrônicos e/ou computacionais (como sistemas em nuvem, por exemplo). Logo, a parte de sensores no mundo maker é de fundamental importância para o desenvolvimento dos mais variados tipos de projetos.
Neste artigo, serão mostrados os sensores mais utilizados em projetos makers no geral e em projetos makers em IoT, de modo que você possa ter conhecimento de qual sensor aplicar nos seus protótipos.
Sensores - o que são?
Inicialmente, vamos definir o que é um sensor. Em poucas palavras, um sensor é um elemento capaz de:
1. Detectar e reagir a um estímulo do ambiente (exemplos: luz, temperatura, umidade do ar etc.)
2. Fazer uma leitura / quantificar este estímulo detectado
3. Fornecer como saída para um sistema eletrônico e/ou computacional um sinal elétrico que, se lido / decodificado corretamente, permite obter a leitura do sensor sobre o estímulo referido.
Portanto, é uma analogia válida dizer que os sensores são os “olhos e ouvidos” de um sistema eletrônico e/ou computacional, permitindo que o mesmo perceba o ambiente a sua volta. A seguir, serão apresentados alguns dos sensores mais comuns / utilizados no mundo maker.
Sensor de distância ultrassônico HC-SR04
O sensor de distância ultrassônico HC-SR04 é capaz de medir distâncias através de reflexões de ondas sonoras em frequência de ultrassom, através de um transmissor e um receptor ultrassônicos. As distâncias medidas podem estar na faixa de dois centímetros até quatro metros. A figura 1 mostra este sensor na sua forma mais encontrada no mercado.
")
Seu princípio de funcionamento é descrito a seguir: o transmissor emite um sinal sonoro ultrassônico (disparado pelo pino Trig do sensor) e este sinal viaja pelo ambiente até atingir um objeto e ser refletido novamente para o sensor. Ao atingir o sensor após a reflexão, este sinal é captado pelo receptor ultrassônico (o que pode ser lido pelo pino Echo do sensor). Observe a figura 2.

Com o conhecimento da diferença de tempo entre o envio e a recepção do sinal ultrassônico (?Tempo) e sabendo que velocidade de propagação do som no ar (Vsom) é de aproximadamente 340m/s, a distância entre sensor e objeto detectado (Dobj) pode ser calculada pela fórmula da figura 3.

Como o sinal sonoro ultrassônico pode ser refletido tanto por objetos sólidos quanto por líquidos, é possível medir a distância entre o sensor e um objeto nas mais variadas situações, desde a distância entre dois robôs ou veículos até na medição de nível de água em uma caixa d'água, por exemplo. Dessa forma, trata-se de um sensor muito versátil e usado no mundo maker.
Sensor de temperatura ambiente e umidade relativa do ar DHT22
O sensor DHT22 é capaz de mensurar temperatura ambiente e umidade relativa do ar. Este sensor, também conhecido comercialmente como AM2302, pode ser visto na figura 4.
")
Em linhas gerais, as principais características deste sensor são:
- Tensão de operação: de 3,3 a 5,5V (DC);
- Faixa de operação de temperatura: -40 até +80ºC;
- Faixa de operação de umidade relativa do ar: 0 até 100%;
- Exatidão de +-0,5ºC na medição de temperatura;
- Exatidão de +- 2% na medição de umidade relativa;
- Protocolo de comunicação: 1-wire (o que permite uso à 3 fios, sendo um para comunicação e dois para alimentação);
O sensor é muito versátil, sendo utilizado para monitoramento de temperatura ambiente e umidade relativa do ar nos mais variados locais, de ambiente rural a ambientes com computadores e CPD (Centro de Processamento de Dados).
Sensores para detecção de gases tóxicos, gases inflamáveis e fumaça (MQ-2 e MQ-135)
Muitas vezes, projetos em IoT exigem monitoramento de ambientes visando detecção de gases que possam causar muito dano, causando aumento de risco de incêndios e intoxicação de seres humanos e animais. Para a detecção de gases tóxicos, gases inflamáveis e fumaça dois sensores são muito usados e aplicados no mundo maker: MQ-2 e MQ-135. Veja na figura 5 os módulos com os sensores MQ-2 (5.a) e MQ-135 (5.b). Ambos os módulos de sensores (MQ-2 e MQ-135) possuem saídas analógicas e digitais (por meio de um comparador digital, incluso no módulo).
 e MQ-135 (b)")
O sensor MQ-2 tem a finalidade de de detectar gases inflamáveis (gás liquefeito de petróleo, metano, propano, butano, hidrogênio, álcool, gás natural entre outros gases inflamáveis) e fumaça, em uma faixa de concentração (em partes por milhão) de 300 ppm até 10.000 ppm.
Já o sensor MQ-135 tem como finalidade a detecção de gases tóxicos a seres humanos e outros animais (amônia, dióxido de carbono, benzeno, óxido nítrico, fumaça e álcool), em uma faixa de concentração (em partes por milhão) de 10 ppm até 1000 ppm para benzeno e 10 ppm até 300 ppm para demais gases.
Sensor de fluxo de água
O sensor de fluxo de água tem como função indicar, por meio de pulsos elétricos, vazão de água que passa dentro do sensor. Desse modo, um sistema eletrônico e/ou computacional é capaz de contabilizar, além da própria vazão de água, o volume acumulado de água que passou pelo sensor, permitindo assim a medição de volume de água consumido por um sistema hidráulico qualquer (uma residência, por exemplo).
Este sensor pode ser encontrado no mercado maker em diversos diâmetros de tubulação (½”, ¼”, etc.) e se apresenta conforme mostra a figura 6. Em termos de conexões elétricas, este possui somente três fios: alimentação (5V e GND) e saída pulsada.
")
Os pulsos elétricos gerados (indicando a passagem de água pelo sensor) têm frequência proporcional à vazão medida pelo sensor. Ou seja, quanto maior a vazão de água, maior a frequência dos pulsos elétricos gerados. Para utilizar este sensor de forma apropriada é necessário fazer o processo de calibração antes de seu funcionamento pleno. Este processo visa determinar, para o sistema hidráulico no qual o sensor de fluxo de água está sendo usado, quantos pulsos elétricos correspondem a um litro de água que flui por ele. Este processo de calibração consiste, portanto, no seguinte procedimento:
1. Primeiramente, deve-se deixar o sistema hidráulico na seguinte condição: sem fluxo de água, com sensor de fluxo de água instalado, somente uma saída de água possível e com um dispositivo eletrônico capaz de contar pulsos ligado diretamente na saída de pulsos do sensor.
2. Utilizando um recipiente com graduação de volume (e capacidade igual ou superior a um litro) na saída de água do sistema hidráulico em questão, libere o fluxo de água. Com ajuda do dispositivo eletrônico de contagem de pulsos, deve-se contabilizar quantos pulsos elétricos foram gerados até o recipiente ficar com volume cheio igual a um litro de água. Faça o fechamento do fluxo de água do sistema hidráulico após se atingir este volume no recipiente graduado.
3. O número de pulsos obtidos corresponde a taxa de pulsos / litro do seu sistema hidráulico (o que, por sua vez, é o valor de calibração do sistema). Esta é a relação de pulsos / litro que você deve usar no seu sistema eletrônico e/ou computacional para contabilizar vazão e volume de água consumidos.
É importante também ressaltar que há um limite máximo de vazão permitida por este sensor. De forma geral, os sensores deste tipo mais comumente encontrados no mercado (como o mostrado na figura 6) possuem um limite máximo de vazão de 30 litros por minuto.
Sensores de luz: LDR e BH1750
Muitas vezes, é preciso que o sistema eletrônico e/ou computacional que está sendo desenvolvido “entenda” como estão as condições de luz do local ou, em alguns casos, seja capaz de apenas diferenciar entre um ambiente claro ou escuro. Para este tipo de tarefa, são utilizados sensores de luz. Neste tópico, abordaremos dois deles: o LDR e o BH1750.
O LDR (acrônimo para Light Dependent Resistor) é um sensor que, em resumo, se comporta como um resistor controlado por luz:
- Quando há luz incidindo sobre o sensor, ele funciona como um resistor de baixa impedância (na ordem de algumas centenas de Ohm, podendo chegar na ordem de poucos kOhm).
- Quando não luz incidente, este funciona como um resistor de alta impedância (na ordem de centenas de kOhm, podendo chegar na ordem de alguns MOhm).
Desta forma, se utilizado em conjunto com outros circuitos ou sistemas eletrônicos, permite que se possa distinguir entre ambiente claro e escuro. Entretanto, não é possível medir iluminância (em Lux) - ao menos não de forma confiável em termos metrológicos - usando o LDR. Há diversos tipos de LDR disponíveis no mercado, sendo mais comuns em projetos eletrônicos os LDR de 5mm, como o mostrado na figura 7.
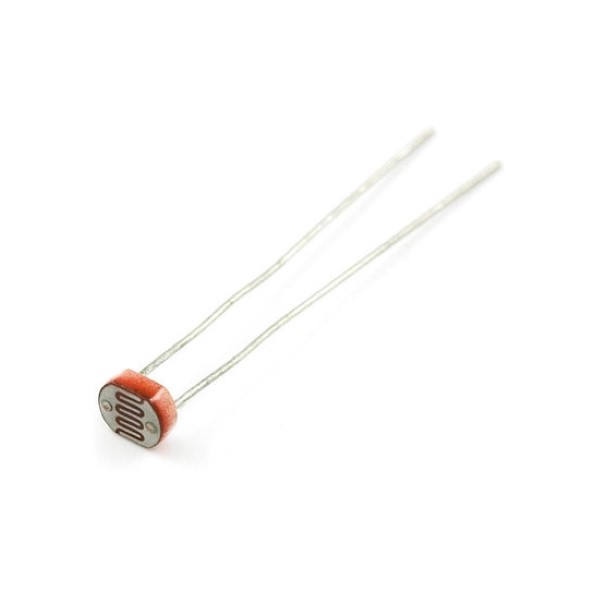
fonte da imagem: https://www.filipeflop.com/produto/sensor-de-luminosidade-ldr-5mm/
Quando é necessário se medir a iluminância do local, ou seja, saber exatamente quantos Lux estão presentes no ambiente, pode ser utilizado, por exemplo, o sensor BH1750. Este sensor consiste em um circuito integrado de pequenas dimensões físicas (e com comunicação via protocolo I²C) capaz de medir iluminância em uma faixa que vai de 1 Lux até 65.535 Lux. Além disso, o BH1750 pode operar em uma faixa de temperatura de -40°C até +85°C, podendo, portanto, ser utilizado para medir iluminância nos mais variados tipos de ambientes. A figura 8 mostra um módulo contendo o sensor BH1750.
")
Fonte https://www.filipeflop.com/produto/sensor-de-luz-bh1750fvi-lux/
Sensor de pressão barométrica BMP180
A pressão barométrica é uma medição muito importante, sobretudo para a meteorologia. Com esta medição é possível inferir a que altitude em relação ao nível do mar que se está e, além disso, monitorar questões climáticas. Por exemplo, uma queda significativa de pressão barométrica pode indicar a chegada de uma tempestade. Para medir a pressão barométrica, um sensor muito utilizado é o BMP180. Um módulo contendo este sensor pode ser visto na figura 9.
")
Fonte: https://www.filipeflop.com/produto/sensor-de-pressao-e-temperatura-bmp180/
O sensor BMP180 permite medir pressões barométricas em uma faixa de 300 hPa 1100 hPa, correspondendo a pressões barométricas na faixa de altitudes de 9000 metros acima do nível do mar até 500 metros abaixo do nível do mar. Além disso, o sensor ainda é capaz de medir temperatura ambiente, configurando-se assim muito útil em projetos relativos à meteorologia. Ainda, o sensor suporta trabalhar na faixa de temperatura de -40°C até +85°C, o que permite sua aplicação de forma muito versátil.
Sensores de orientação espacial: acelerômetro e giroscópio (MPU-6050)
Em alguns casos, é necessário que o sistema computacional e/ou eletrônico conheça sua orientação espacial. Um exemplo de um sistema deste tipo disso são os quadricópteros, equipamentos que necessitam saber precisamente sua orientação espacial a fim de decolar em segurança, controlar seus motores para se manter estável no ar e se locomover de forma segura e precisa para seu destino. Para esta finalidade, são utilizados sensores de orientação espacial.
Esses tipos de sensores compõe a chamada IMU (Inertial Measurement Unit, sendo em tradução livre “Unidade de Medição Inercial”), um chip / unidade eletrônica capaz de medir com grande precisão e exatidão grandezas inerciais relacionadas à orientação espacial (nos eixos x, y e z), tais como: componentes de aceleração linear medidas com acelerômetros, componentes de variação angular com giroscópio e componentes de intensidade de campo magnético com magnetômetro. Tais medições, sejam combinadas ou usadas de forma isolada, permitem inferir a orientação de um corpo no espaço.
Tipicamente, um IMU disponibiliza estas três medições (aceleração linear, intensidade de campo magnético e variação angular) ou apenas duas delas (aceleração linear e variação angular). Um dos IMUs mais comuns no mercado maker é o MPU-6050, o qual disponibiliza aceleração linear e variação angular (ou seja, possui acelerômetro e giroscópio) nos eixos x, y e z. O MPU-6050 possui comunicação via I²C. Um módulo contendo o IMU MPU-6050 pode ser visto na figura 10.
")
Fonte: https://www.filipeflop.com/produto/acelerometro-e-giroscopio-3-eixos-6-dof-mpu-6050/
Este módulo é capaz de medir:
Acelerações lineares em g, sendo 1 g igual ao valor da constante gravitacional, (aproximadamente 9,81 m/s²). Tais medições estão disponíveis nos três eixos, nas faixas de +-2g, +-4g, +-8g e +-16g.
Variações angulares (em graus por segundo) nos três eixos, nas faixas de: +-250°/s, +-500°/s, +-1000°/s e +-2000°/s.
Ainda, o MPU-6050 pode medir temperatura ambiente e é capaz de operar em uma faixa de temperatura de -40°C até +85°C.
Conclusão
Todo sistema eletrônico / computacional precisa “enxergar e ouvir” o ambiente a sua volta, processar dados do mesmo e devolver uma informação com valor agregado para um ser humano ou outro sistema eletrônico / computacional (como um sistema em nuvem, por exemplo). Sendo assim, os “olhos e ouvidos” de um sistema deste tipo são os sensores.
Neste artigo, você pode aprender o que são sensores e quais são os mais utilizados em projetos makers e protótipos em Internet das Coisas. Com este conhecimento, você saberá melhor como desenvolver seus projetos, sendo capaz de selecionar os sensores mais corretos para cada tipo de aplicação / projeto.