Baterias recarregáveis do tipo Lítio-Íon (Li-Ion), pela sua densidade de energia, têm sido usadas cada vez em muitas aplicações do tipo portátil. No entanto, para carregar essas baterias são necessários circuitos espeiais, que devem levar em conta todas suas características para se obter a melhor carga e também a maior vida útil. As soluções que fazem uso de microcontroladores são as preferidas, como a que descrevemos neste artigo com base no MSP430 da Texas Instruments (www.ti.com).
Soluções de baixo custo que fazem a carga segura de bateria são as preferidas atualmente, principalmente aquelas que utilizam microcontroladores.
A capacidade de uma bateria é expressa como capacidadeC, dada em mA-h. Por exemplo, uma bateria de 500 mAh tem uma taxa C de 500 mA. A correspondente da 1 C é 500 mA e a corrente de 0,1 C é de 50 mA.
Assim, levando em conta essa informação, a carga de uma bateria Li-Ion deve ser feita em três etapas:
* Carga lenta – uma pré-carga feita com uma corrente de 0,1 C.
* Carga rápida – uma carga com corrente constante feita com 1 C.
* Etapa de tensão constante
Durante a carga lenta, a bateria é carregada com uma corrente de 0,1 C. Isso vai ocorrer quando a bateria estiver com uma tensão menor do 2,5 V.
Algumas baterias de Nicad são recarregadsa sem que haja necessidade de uma descarga completa, o que faz com que elas passem a apresentar o “efeito memória”.
As baterias Li-Ion não têm esse problema, podendo ser totalmente carregadas antes de uma descarga total. Portanto, o procedimento de carga lenta raramente é empregado com esse tipo de bateria.
A carga rápida (com corrente constante e tensão constante) é a fase mais importante no processo com esse tipo de bateria. Muitas baterias Li-ion estarão plenamente carregadas com uma tensão de 4,1 V ou 4,2 V.
Assim, a bateria é carregada com corrente constante de 1 C até a tensão alcançar 4,1 V ou 4,2 V. O circuito mede continuamente a corrente de sensoriamento - a corrente num resistor sensor ligado em série (Rsense) ajustando o ciclo ativo do PWM com o Microcontrolador. Quando a tensão alcançar esse valor, o circuito passará a operar no modo de carga com tensão constante.
Quando isso acontece, o circuito passa a funcionar como uma fonte de tensão fixa de 4,1 V ou 4,2 V. Nesse ponto, a resistência interna da bateria começa a cair, o que exige uma compensação para manter a corrente abaixo de0,1 C.
Na figura 1 temos um gráfico que mostra o que ocorre no processo de recarga de uma bateria.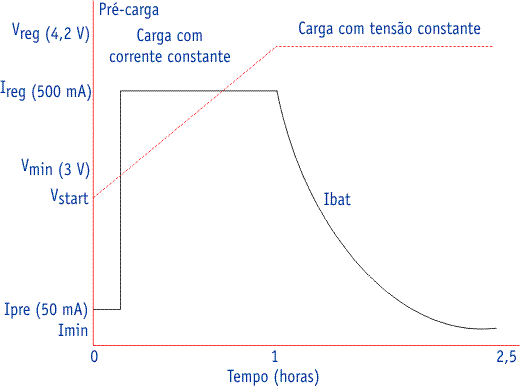
Quando a bateria está completamente carregada, a maiort parte da energia será convertida em calor. Assim, uma sobrecarga pode causar um sobreaquecimento e até explosão. De qualquer forma, isso reduz a vida útil da bateria.
As baterias Li-Ion são extremamente sensíveis a sobrecarga, o que significa a necessidade de se controlar com precisão de 50 mA a tensão de 4,1 V ou 4,2 V do processo de recarga.
Alguns métodos permitem determinar quando uma bateria está completamente carregada. Esses métodos são:
* Durante o processo de carga com tensão constante, quando a corrente cai para 0,1 C a bateria se encontra completamente carregada.
* Determinar a temperatura da bateria de modo a se determinar quando começa a ocorrer o sobreaquecimento.
* Usar um método de temporização seguro. Quanto mais o tempo passar de um valor considerado ideal para a carga, a bateria poderá ser considerada completamente recarregada.
Na figura 2 temos então o circuito em blocos sugerido pela Texas Instruments para seu carregador usando o MSP430.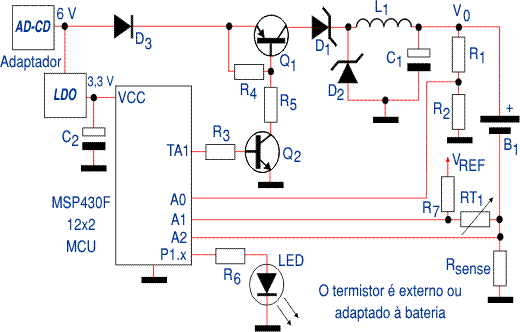
Observe a utilização de um conversor tipo buck para manter a corrente e a tensão na bateria no processo de recarga. Os transistores PNP e NPN formam uma chave que é controlada por um sinal PWM.
O Timer_A3 do MSP430 pode ser usado para controlar a corrente de carga da bateria usando o recurso PWM. Quando essa chave está ligada, a corrente circula através do indutor e o capacitor é carregado, como exibe a figura 3.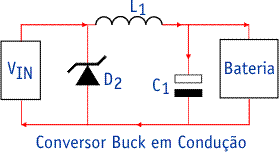
Quando a chave é desligada, o indutor tenta manter a corrente induzindo uma tensão, pois o indutor não pode sofrer uma alteração instantânea da corrente. Nesse momento, a corrente circula através do diodo e do indutor, carregando o capacitor, veja a figura 4.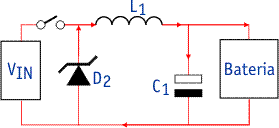
A rede LC atua como um filtro passa-baixas, e se a freqüência do PWM for muito maior do que a freqüência de corte da rede LC, a tensão no capacitor se torna constante e igual ao valor médio da tensão de entrada no conversor buck.
Cálculos que levam aos valores dos componentes dessa etapa podem ser obtidos no Application Note SLAA287 da Texas Instruments.
O indutor deve ter pelo menos 62 ?H, sendo usado na implementação 72 ?H. A freqüência foi fixada em 3,84 MHz, o que resulta numa freqüência PWM de 15 kHz. (3,84/256).
Uma resolução do PWM de 8 bits é suficiente para controlar a circulação de uma corrente constante na bateria durante a carga de corrente constante e manter uma tensão constante nesse modo de carga.
Se o capacitor usado for de 220 ?F e o indutor de 75 ?H teremos uma freqüência de corte de 1,2 kHz, que é bem menor do que a freqüência do PWM, o que permite obter uma baixo ripple na saída.
Três canais (A0, A1 e A2 do conversor A/D de 10 bits do MSP430 podem ser usados para monitorar a tensão da bateria, a temperatura e a corrente. Com 1 LSB de resolução, isso significa uma precisão de 1,47 mV nas leituras.
Uma indicação de tensão muito baixa ou sobreaquecimento da bateria, interromperá o processo de recarga.
Software
O software pode ser elaborado tanto em linguagem C como assembly, (IAR e CCE), podendo ser obtido no próprio site da Texas Instruments. O software é dividido em uma rotina principal e duas sub-rotinas.
Conclusão
O baixo consumo, baixo custo e outras características relevantes dos microprocessadores da série MPS430 os torna ideais para aplicações como as que descrevemos.
O leitores interessados em conhecer mais sobre esses microcontroladores podem consultar diversos artigos e projetos que publicamos em edições anteriores desta revista.