O circuito que descreveremos permite o controle de velocidade de motores de corrente contínua a partir do simples toque dos dedos em sensores ou então por meio de um joystick de jogos eletrônicos. O controle atua no sentido de haver aceleração ou desaceleração constante do motor, conforme a posição do joystick ou do sensor tocado. Os motores controlados podem ter correntes de até 1A, o que torna o projeto ideal para aplicações em robótica experimental. No projeto incluímos uma fonte de corrente contínua, mas o sistema funcionará também a partir de pilhas ou baterias.
Reunir um controle de velocidade para pequeno motor a um sistema remoto de atuação por chave ou toque é algo de grande interesse para os projetos de robótica.
No caso de um joystick, por exemplo, podemos usá-lo num sistema de braço ou guindaste experimental, o mesmo ocorrendo em relação ao sistema de toque.
Ainda com relação ao joystick, podemos aproveitar suas quatro chaves internas para o controle de dois motores de modo simultâneo, acelerando-os ou desacelerando-os, conforme as necessidades.
Com a alavanca para frente temos a aceleração do motor no 1, e para trás sua parada ou desaceleração. Com a alavanca para a direita temos a aceleração do motor no 2, e para a esquerda sua desaceleração ou parada. a
O controle se caracteriza pela sua linearidade, variando entre 0 e 100% a tensão aplicada ao motor e, consequentemente, sua potência.
É claro que o mesmo circuito também pode ser usado para o controle de outras Cargas de corrente contínua tais como pequenas lâmpadas, aquecedores, solenoides, eletroímãs etc.
Num eletroímã, por exemplo, temos até a possibilidade de controlar, num guindaste elementar, a força de atração, dosando a quantidade de chapas de metal que ele é capaz de elevar ou soltar (figura 1).

O CIRCUITO
O coração do circuito é um amplificador operacional, com um transistor de efeito de campo na entrada do tipo CA3140, que opera como um seguidor de tensão, ou seja, uma disposição amplificadora que se caracteriza por um ganho unitário de tensão, mas uma impedância elevadíssima de entrada, da ordem de trilhões de Ω.
Essa impedância de entrada é tão alta que podemos ligar ao operacional um capacitor carregado que ele manterá sua carga por um longo intervalo de tempo, sem qualquer variação perceptível.
Foi justamente aproveitando essa possibilidade que elaboramos nosso controle por toque.
Na entrada do operacional ligamos um capacitor de 1 a 4,7 µF, de poliéster, de boa qualidade que não apresenta fugas perceptíveis. A carga e descarga deste capacitor podem ser feitas através de dois resistores de 1M5 ligados a um par de contatos por toque ou então ao joystick.
Quando o sensor X1 é ativado, ou então a chave X1 do joystick é acionada, o capacitor carrega-se lentamente através de R1 de modo que, a tensão na entrada do operacional, sobe gradualmente.
Essa tensão é amplificada e aparece na saída do operacional (pino 6), sendo aplicada à base de um transistor BC548 e depois à base de um transistor de maior potência (Q1), capaz de controlar a carga.
Dependendo do tempo em que tocamos em X1 ou acionamos a chave do joystick a tensão sobe entre 0 e 100% da tensão de alimentação (que pode ser de 6 ou 12 V).
Isso quer dizer que podemos dosar com facilidade, pelo tempo de acionamento, a tensão na carga.
Tirando o dedo do sensor ou desligando o joystick, o capacitor mantém por longo tempo a tensão na entrada do operacional e, com isso, a velocidade do motor controlado.
Para alterar a velocidade do motor, reduzindo-a, tocamos em X2 ou acionamos X2 do joystick. Nessas condições, o capacitor se descarrega vagarosamente através de R2, o que permite dosar exatamente a tensão aplicada ao motor, pois é praticamente a mesma de C3.
O LED ligado na saída de Q1 permite uma visualização da ação do controle.
A fonte de alimentação estabilizada de 1A pode ser de 6 V (7806) ou 12 V (7812), conforme o tipo de motor controlado.
MONTAGEM
Na figura 2 damos o diagrama completo de nosso controle por toque e joystick.

A placa de circuito impresso é mostrada na figura 3.

Tanto o transistor Q1 como o integrado da fonte CI-1 devem ser dotados de um radiador de calor, principalmente se a operação for feita com motores de correntes elevadas.
O transformador deve ter enrolamento primário de 110/220 V, ou de acordo com a tensão da rede local, e secundário de 6+6 ou 12+12 V, conforme a tensão do motor.
A corrente também deve ser de acordo com o motor, ficando seu limite em torno de 1 A.
O eletrolítico C1 deve ter uma tensão de trabalho de 25 V e os demais, tensões de pelo menos 6 V, conforme a saída desejada para o motor.
R5 é .o único componente cujo valor depende da tensão de saída. Para 6 V use um resistor de 470 Ω e para 12V um resistor de1k2.
Os demais resistores são de 1/8 W com 5 ou 10°/o de tolerância. Um componente, que deve ser escolhido com cuidado é C3. Que deve ser de poliéster de boa qualidade com valores entre 1 µF e 4,7uF. O valor deste componente determina a velocidade de resposta do sistema. Menor capacitor
significa uma variação mais rápida ao toque ou ação do joystick.
Para os diodos retificadores pode- mos usar equivalentes como os 1N4004 ou mesmo BY127.
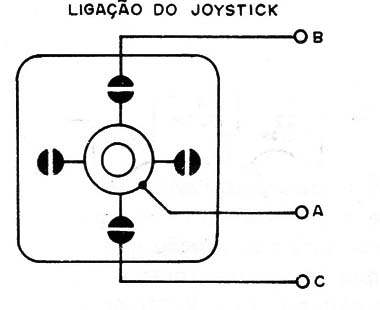
Na figura 4 damos o modo de se fazer a ligação do sistema a um joystick convencional (do tipo usado em MSX (O artigo é de 1988) ou Atarí).
PROVA E USO
Basta ligar um motor de corrente contínua de 6 ou 12 V (conforme a saída desejada) com corrente de até 1 A ou então uma lâmpada incandescente de mesmas características para testar o funcionamento do controle.
Ligue a unidade e toque nos sensores, primeiro em um e depois no outro. A velocidade do motor deve aumentar ou diminuir, conforme o sensor tocado. O mesmo deve ocorrer com o joystick, caso em que o movimento da alavanca para frente acelera o motor e para trás reduz sua velocidade.
Deixando de tocar nos sensores, ou com a alavanca na posição central, a velocidade ajustada pelo sistema para o motor deve ser mantida. Se isso não ocorrer troque o capacitor C3, que pode estar com problemas de fugas.
Comprovado o funcionamento do sistema é só fazer sua instalação definitiva.
Na figura 5 temos a sugestão de montagem de um guindaste eletromagnético controlado por dois circuitos iguais ao descrito.

A alavanca para frente faz subir o sistema, com aumento da velocidade e para trás a reduz. A chave inverte a rotação do motor provendo a descida com os mesmos controles.
A mesma alavanca para um lado aumenta a força do ímã e para o outro reduz até zero sua força.
O ímã pode ser elaborado enrolando-se de 2000 a 5000 voltas de fio esmaltado 30 ou 32AWG num parafuso de 2,5 x 0,5 cm. Duas arruelas servem como laterais para reter as espiras da bobina.
CI-1 - 7806 ou 7812 - conforme a tensão desejada - circuito integrado regulador de tensão
CI-2 - CA314O - amplificador operacional com FET
Q1 - TIP31 - transistor NPN de potência
Q2 - BC548 - transistor NPN de uso geral
D1, D2 - 1N4002 - diodos retificadores
D3 - 1N4002 ou 1N4148 - diodo de silício de uso geral
LED - LED vermelho comum
T1 - transformador com primário de 110l220 V e secundário de 6+6 V a 12+12 V, conforme tensão desejada, e 1 A de corrente
S1 - interruptor simples
S2 - chave de tensão 110/220 V
F1 - fusível de 1 A
R1, R2 - 1M5 - resistores (marrom, verde, verde)
R3 - 4k7 - resistor (amarelo, violeta, vermelho)
R4 – 330 R - resistor (laranja, laranja, marrom)
R5 – 470 R (6V) ou 1k2 (12V) - resistor - ver texto
C1 – 1 000 µF x 25 V - capacitor eletrolítico
C2 – 10 µF x 12 V - capacitor eletrolítico
C3 – 1 µF a 4,7 µF - capacitor de poliéster (100 V ou mais)
Diversos: placa de circuito impresso, cabo de alimentação, suporte para fusível, caixa para montagem, radiadores de calor, sensor ou joystick, fios, solda, etc.
Obs.: Os sensores podem ser chapinhas de metal próximas, de modo a permitir o toque simultâneo pelo contato dos dedos.