Descrevemos neste artigo o LM1819 da National Semiconductor, que é um driver para instrumentos de núcleo de ar (imã móvel) e que consiste basicamente num amplificador de Norton e um transistor driver para o condicionamento do sinal. Com uma excelente linearidade, este integrado pode ser usado em diversos aplicativos, envolvendo instrumentação eletrônica e que serão dados neste artigo.
Obs. O artigo é de 1990. Tanto os instrumentos de ímã móvel não são mais usados como o próprio integrado difícil de obter. Vale como informações e para eventuais aplicações diferentes.
O LM1819 da National Semiconductor pode excitar saídas com correntes de até 20 mA e produz uma tensão de +/-4,5 Volts. Sua linearidade é melhor que 2% numa faixa de operação de 305 graus.
MEDIDORES DE IMÃ MÓVEL
Os medidores deste tipo são utilizados em uma grande gama de aplicações industriais e de controle dada sua resistência diante das condições ambientes, já que não necessitam de calibração durante o longo tempo de funcionamento.
Na figura 1 temos o princípio de funcionamento de um instrumento deste tipo que é formado por três elementos principais:

Um imã com uma agulha presa através de um eixo pode movimentar-se livremente entre duas bobinas montadas perpendicularmente. Observe que a única parte móvel do sistema é o conjunto formado pelo imã e pela agulha indicadora.
O imã tende a se posicionar paralelamente ao vetor H, resultante dos campos magnéticos criados pelas duas bobinas.
Se circular corrente apenas na bobina seno, o imã se alinha com esta bobina, e se corrente circular apenas na bobina cosseno, o imã se alinha com esta segunda bobina.
Para correntes circulando pelas duas bobinas o alinhamento do imã ocorre em posição que depende da resultante dos campos criados pelas bobinas, conforme mostra a figura 2.

Variando tanto a ,intensidade da corrente pelas bobinas como também seu sentido de circulação podemos fazer com que o imã se posicione em qualquer ângulo de 0 a 360°.
Na prática não usamos toda a rotação do instrumento, como no caso do LM1819 que tem uma ação mínima garantida sobre o instrumento de 305°.
Nos instrumentos deste tipo o eixo é suportado por buchas de nylon.
Enquanto num instrumento deste tipo temos um torque elevado, nos instrumentos D'Arsonval (Bobina Móvel), o torque é muito menor e o posicionamento da agulha depende do ajuste e força aplicada pela mola espiral de retorno.
Nos instrumentos de Imã Móvel, não existe a mola e a calibração depende exclusivamente do alinhamento das duas bobinas.
Uma vez que estas são posicionadas no processo de fabricação não existe necessidade de posterior ajuste.
A obtenção de um deslocamento linear para o ponteiro depende de uma correta dosagem da corrente nas bobinas.
Com a utilização de um circuito apropriado pode-se determinar uma constante k de proporcionalidade para a tensão de entrada tal que o ângulo de deslocamento ? seja função linear da mesma tensão de entrada, conforme mostra a figura 3.

O LM1819
O circuito integrado LM1819 consiste num gerador de função cujas saídas são projetadas para variar aproximadamente segundo o seno e o cosseno de uma entrada. Uma corrente mínima de 20 mA é disponível sob tensão de + /-4 Volts.
O ponto comum das duas bobinas têm retorno para um diodo zener de 5,1 V e aplicado de volta ao pino 1 do integrado.
Na figura 4 temos um circuito aplicativo típico para este integrado.

Para o LM1819 temos uma constante k de aproximadamente 54°/V. O gerador de função interno é ligado diretamente a saída do amplificador de Norton interno.
Tipicamente, a tensão de referência no pino 4 é de 2,1 Volts de modo que:
? = 54(V8 -2,1)
Como V8 varia de 2,1 a 7,'75V, o gerador de função excitará o instrumento numa faixa de ângulos até 305°.
Os instrumentos de imã móvel são zerados durante o processo de fabricação quando somente a bobina de cosseno é excitada.
Neste caso o ponteiro vai indicar zero na escala, a não ser em aplicações em que seja exigida outra indicação para este ponto.
Quando temos este ponto de indicação uma corrente de alguns microampères apenas é drenada pelo circuito integrado.
Um amplificador de Norton é disponível para condicionar diversos tipos de sinais de entrada ao gerador de função.
Este tipo de amplificador foi escolhido para este integrado dada a facilidade de sua utilização num conversor freqüência/tensão.
Enquanto a entrada não-inversora (pino 6) é polarizada com uma tensão equivalente à queda num diodo em relação a terra, a entrada inversora (pino 5) se mantém num nível de 2,1 V, igual à referência do pino 4.
O espelho de corrente se mantém com ganho plano até uma corrente de 5 mA.
A saída do amplificador de Norton (pino 8) é projetada para fornecer corrente à carga. Para usar o amplificador de modo “bypass” simplesmente aterra-se a entrada não inversora e liga-se a entrada inversora à saída, formando-se assim um seguidor de tensão.
Um transistor NPN é incluído para isolar e tornar quadrados os sinais de entradas. No circuito da figura 4 temos um exemplo de como este transistor é usado.
O pulso de entrada é convertido em retangular por uma rede RC e o transistor.
O emissor deste transistor .é aterrado de modo que é importante que a base do transistor nunca seja levada a um potencial negativo de menos de 5 V dc, pois isso pode causar dano ao componente.
A referência de 2,1 V é derivada de um regulador de 8,5 V disponível ao pino 11. Este ponto do circuito (pino 11) pode Ser usado para alimentar cargas diversas com correntes de até 5mA.
TACÔMETRO
O circuito que mostramos na figura 4 pode ser usado para medir a velocidade de rotação de qualquer tipo de motor ou mecanismo. No caso de um motor de automóvel a rotação é medida em rpm (rotações por minuto).
Esta rotação pode ser medida indiretamente a partir dos pulsos da bobina de ignição.
Para um motor de veículo, a rotação pode ser calculada facilmente pela fórmula:
f = n.w/120
Onde: n é o número de cilindros w és a velocidade de rotação do eixo em que se deseja a medida em RPM f é a freqüência dos pulsos produzidos
Para um motor de 8 cilindros, a máxima freqüência que se espera obter é de 300 Hz. Lembramos que existem sistemas de ignições especiais como por exemplo de algumas motos em que a freqüência da bobina de ignição corresponde a duas vezes a rotação do motor.
Estes sistemas são facilmente identificados pois usam mais de uma bobina de ignição ou então as bobinas têm duas saídas em lugar de uma.
No circuito que mostramos, o sinal da bobina é filtrado por um circuito RC e convertido em pulsos retangulares. A frequência do trem de pulsos é convertida numa tensão proporcional pelo amplificador de Norton.
O elemento S do circuito deve ser aberto e fechado em sincronismo com a rotação do motor. A bobina de ignição pode ser usada para excitar este circuito conforme mostra a figura 5.

Esta forma de onda possui um ciclo ativo constante. D4 retifica esta tensão evitando que tensões negativas possam danificar o integrado. C4 e R5 formam um filtro passa baixas que atenua as componentes de alta freqüência, enquanto R7 limita a corrente de entrada em aproximadamente 2,5 mA.
O resistor R6 polariza a junção base emissor inversamente de modo a levar o transistor ao corte quando S for fechada. O coletor do transistor é ligado ao pino do Cl onde fornece um pulso retangular limpo para sua operação:
Muitos sistemas de ignição modernos utilizam dispositivos de efeitos hall ou então sistemas ópticos, eliminando assim a necessidade do platinado que é justamente a chave S do circuito.
Para estes casos os sinais disponíveis nos circuitos são compatíveis com o integrado descrito podendo ser usados diretamente para sua excitação.
Na figura 6 temos um circuito de excitação que pode ser usado para esta finalidade.

Este circuito pode operar de duas formas: pulso com largura constante (Cl atua como um capacitor de acoplamento) e pulso com ciclo ativo constante (Cl atua como um capacitor diferenciador).
As funções de transferências nos dois casos são diversas, mas a deflexão obtida para o instrumento será sempre proporcional a R2 e o ripple proporcional a C2.
As seguintes variáveis são usadas no cálculo da deflexão do instrumento:
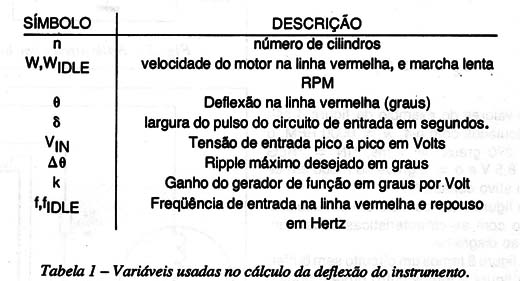
Neste circuito o transistor NPN e o regulador são usados para criar um pulso-VIN: 8,5V. faixas de ripple aceitáveis entre 3 e 10 graus (a largura típica de um ponteiro é de 3 graus) dependendo do amortecimento do medidor e da freqüência de entrada.
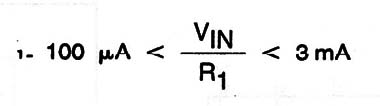
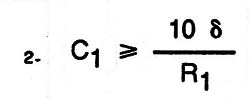
A largura constante do pulso é projetada usando as seguintes equações:
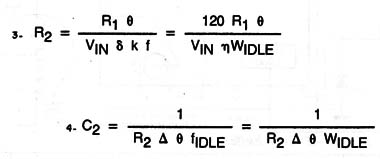
O ciclo ativo constante das equações são dados como se segue.
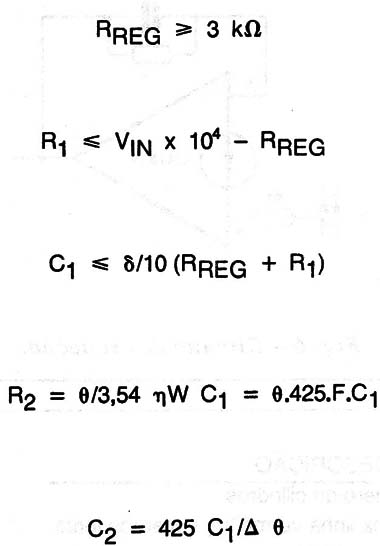
Os valores do exemplo da figura 4 são calculados com n-4, w = 6000 RPM, ? = 270 graus, 1 ms, VIN = VREG = 8,5 V e o = 3 graus no modo em ciclo ativo constante.
Na figura 7 temos mais um circuito prático com as características dadas junto ao diagrama.

Na figura 8 temos um circuito sem buffer.

Na figura 9 temos outro projeto prático com o mesmo integrado.

Finalmente na figura 10 temos um circuito com tensão deslocada em nível por um amplificador operacional externo.