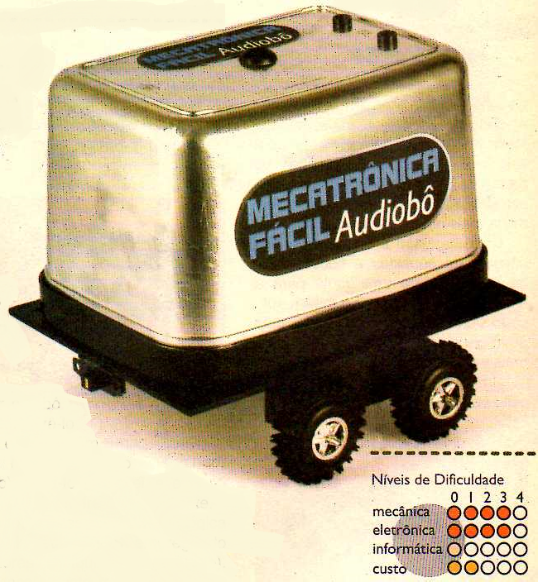
O robô a ser apresentado neste artigo tem sua montagem tanto eletrônica como mecânica bem simples, sendo recomendado ao nosso leitor iniciante assim como ao mais experiente. O robô pode ser aproveitado em feiras e mostras em escolas/faculdades assim como para diversão por parte daqueles que desejam apenas uma montagem simples e sem o uso de microcontroladores.
Nota: Se bem que publicado em 2005, este projeto é ainda bastante atual pelos componentes que usa.
O que o robô é capaz de fazer? Esta deve ser a primeira pergunta do leitor, antes de qualquer montagem, seja ela robótica ou outra. Assim, fica garantido que os objetivos serão alcançados.
O Audiobô é um robô capaz de responder ao "bater de palmas" ou a um outro som "curto" qualquer, como o "estalar dos dedos", para seu controle. Ele realiza seus movimentos de acordo com uma sequência lógica. Veja a figura 1.
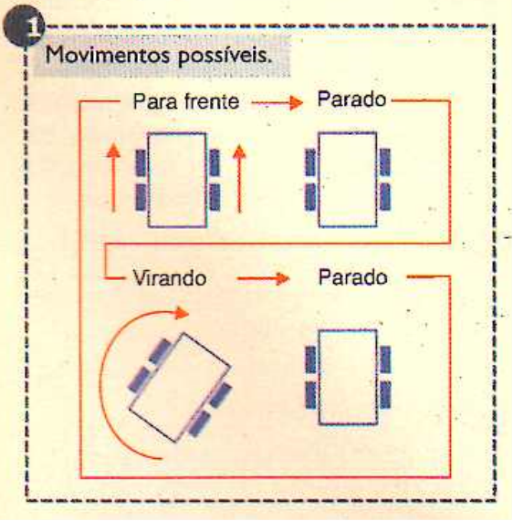
A cada "sinal" (som emitido) recebido, o robô modifica seu "estado interno" e executa um determinado movimento. Assim é possível movimentar o robô à frente, fazê-lo parar, executar um desvio (com o giro do mesmo), pará-lo novamente e depois seguir em frente novamente.
O controle deste robô utiliza lógica digital discreta CMOS empregando contadores (máquinas de estado). Sendo assim, este robô torna-se um forte candidato para uma mostra ou feira em escolas visando demonstrar os conceitos aprendidos em disciplinas como "lógica digital", "circuitos lógicos", entre outras do gênero. Para aqueles que desejam apenas uma montagem simples, de um robô capaz de "interagir" com o usuário de uma forma também simples, a montagem é igualmente indicada.
O CIRCUITO
O circuito do Audiobô, presente na figura 2, foi dividido em três partes. Estas estão destacadas no circuito por cores:
1) Amarelo - Circuito de Clock -Disparo (entrada de som)
2) Azul - Contador (flip-flops e portas lógicas adicionais)
3) Verde - Controle de potência (motores)
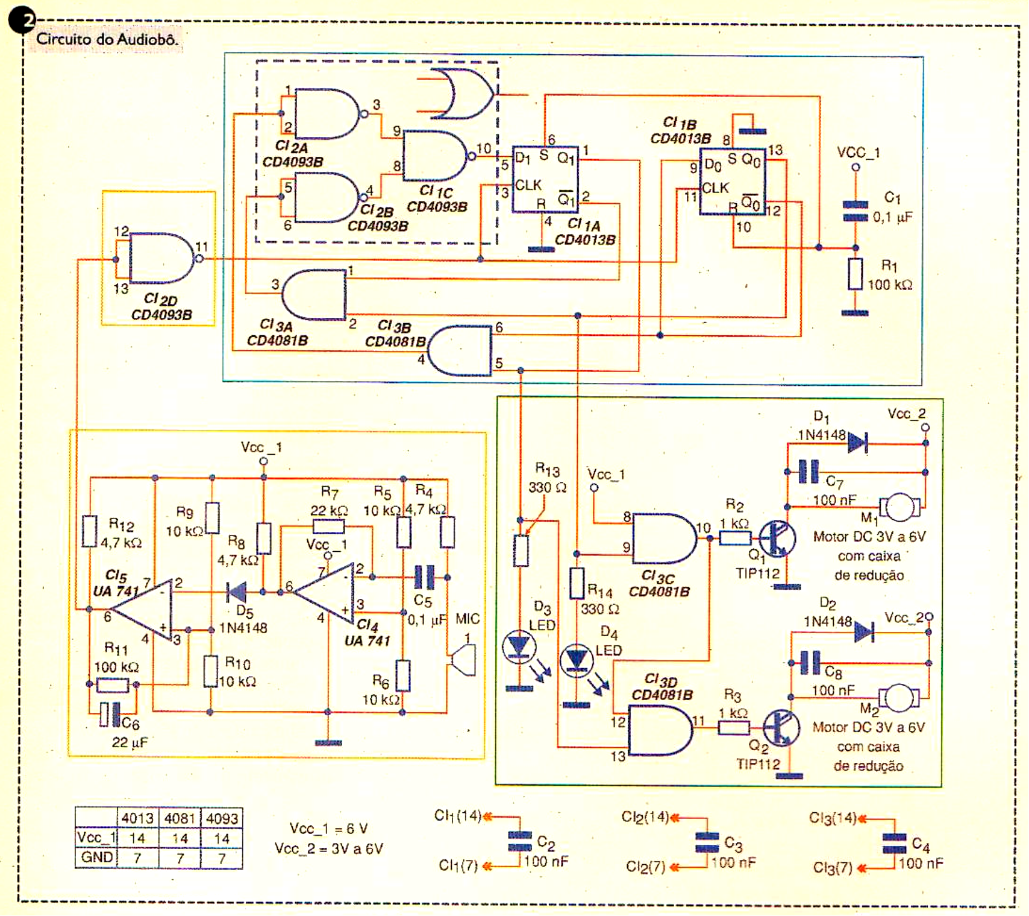
O circuito de "doce (disparo) é um velho conhecido dos nossos leitores. Ele foi utilizado no robô Lixobô -edição n°. 17. Esta parte do circuito é formada por CI4 e CI5 (amplificadores operacionais). A função básica de CI4 é amplificar o sinal vindo do microfone. Esta amplificação tem um ganho baixo para evitar que o robô mude seu "estado" erroneamente (disparo errático) devido a ruídos. CI5 opera como um comparador. Sempre que o sinal de saída de CI4 for menor que 2,5 V teremos na saída de CI5 também zero volts.
Na saída do circuito de clock aplicou-se uma porta lógica o tipo "Schimitt Triger" (Cl2D) para evitar contagens erradas por parte dos flip-flops, já que o sinal do sensor tem subida e descida um tanto lentas.
Essa "lentidão" foi adotada para evitar que o contador receba um trem de pulsos ao invés de apenas um único pulso. A porta lógica aplicada é uma "NAND" (Não "E") de duas entradas. Com a configuração adotada ela passa a trabalhar como uma inversora "NOT" (Não), ajustando o sinal de forma adequada a entrada de clock para Cl (clock na borda de subida do sinal).
O contador do Robô Audiobô possui apenas quatro estados possíveis, com valores de "0" a "3". Assim foi preciso apenas um contador de dois bits e, consequentemente, dois "flip-flops". Os valores e os "efeitos" no robô foram arranjados conforme a tabela 1.
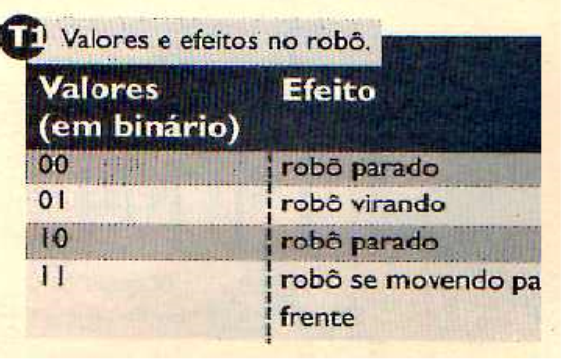
A cada sinal do circuito de "clock" (disparo), o circuito contador realiza uma contagem conforme a sequência da tabela 1. O contador é formado por Cl1, um duplo "flip-flop" do tipo "D" (CD4013) e por partes de Cl2 (Cl2A, Cl2B e Cl2C) um Cl com quatro portas "NAND" (Não "E") Schmitt Trigger e CI3 (CI3A e Cl3B) um Cl com quatro portas "AND" ("E"). Todos estes Cls são CMOS.
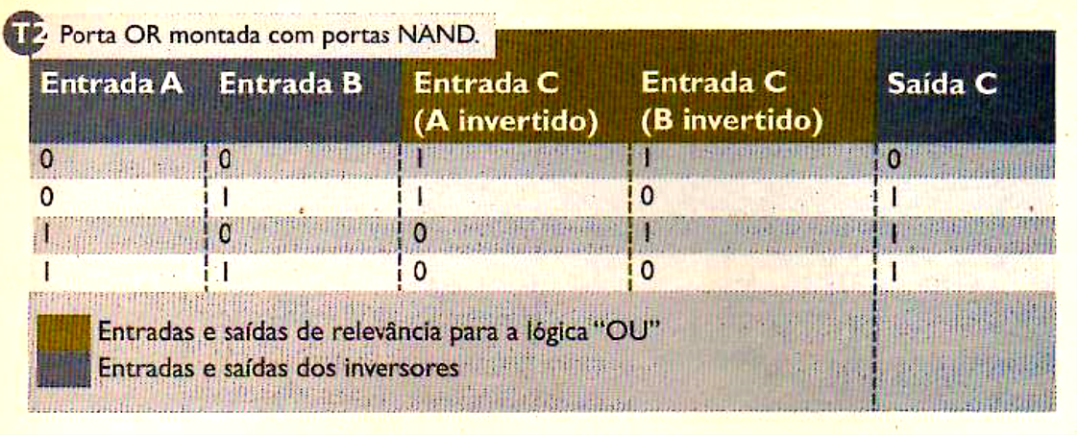
O bloco formado por Cl2A, Cl2B e Cl2C forma uma porta lógica "OR" (OU) de duas entradas e uma saída. Utilizando este tipo de associação, economizou-se mais um Cl no circuito. Na tabela 2, o leitor tem a "tabela verdade" desta implementação.
O capacitor C1 e o resistor R1 formam o circuito para set/reset dos "flip-flops". O primeiro "flip-flop" (Cl1A) é setado ("1" lógico presente em sua saída) e o outro (Cl1B) é "resetado" ("O" lógico presente em sua saída) durante o "startup" (ligar) do circuito. Observando a tabela 1, fica fácil entender o porquê disso. Dessa forma o "contador" inicia sua contagem em "2" ("10" binário). Ao primeiro sinal sonoro (disparo de clock) o robô se movimenta à frente, e depois segue a sequência informada na tabela. Percebe-se, então, que é possível modificar o ponto inicial de um contador qualquer. Isso às vezes pode ser muito útil, como no caso do circuito apresentado.
O controle de potência é feito pelos transistores Q1 e Q2, controlados pela lógica formada por Cl3C e Cl3D. Estas portas "AND" são ligadas às saídas dos "flip-flops" e refletem nos motores o controle desejado. Na tabela 3 é mostrada a "tabela verdade" deste conjunto.
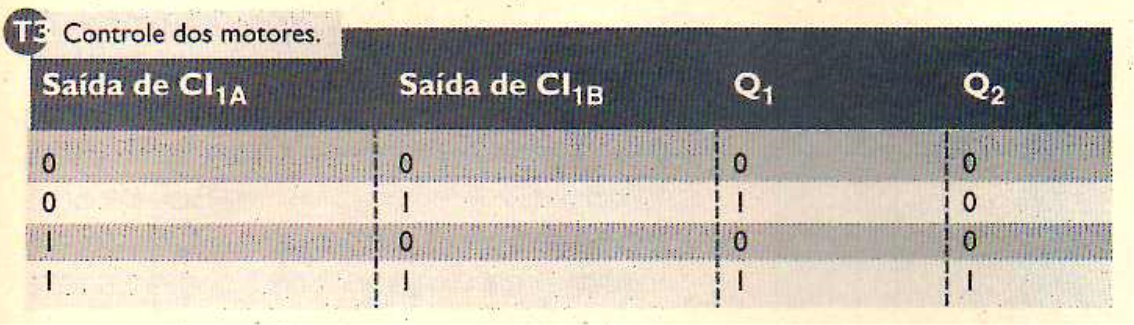
Observando o circuito, nota-se que a porta lógica Cl3C tem uma de suas entradas ligada ao VCC. Sendo assim, temos nesta entrada "1" lógico sempre. Para que sua saída seja levada a nível lógico também "1", basta que sua outra entrada receba nível lógico "1". Esta entrada está ligada ao CI1B. Revendo a tabela 3, percebe-se que isso é feito para os números "1" e "3". Ou seja, o motor "1" (ligado a Q1) é ligado sempre que CI1B tiver nível lógico "1" presente em sua saída. Já o motor "2" (ligado a Q2) só será ligado quando ambas as saídas de CI1A e Cl1B mostraram nível lógico "1" e devido a dependência entre Cl3C e C I3D.
MONTAGEM ELETRÔNICA
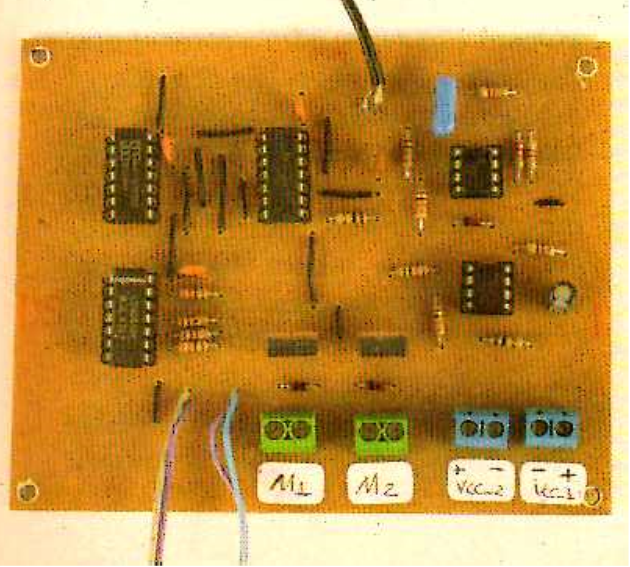
Na figura 3 o leitor tem o layout" para circuito impresso, utilizado em nosso protótipo. Para os Cls recomenda-se o uso de suportes. Isso facilita a troca e/ou reutilização dos Cls em outros protótipos (projetos) se e quando necessário, por exemplo.
Tenha cuidado ao soldar os suportes e componentes polarizados como transistores, diodos, capacitor eletrolítico e LEDs. Qualquer inversão provocará o não funcionamento do circuito e também a perda do componente.
Note que Cl1, Cl2 e Cl3 possuem 14 pinos e sendo assim, é fácil confundi-los entre si. Tenha bastante cuidado ao inseri-los no circuito. CI4 e CI5 são iguais e a troca dos mesmos não causará nenhum efeito danoso ao circuito.
Os resistores utilizados são todos de 1/8 W e os capacitores, salvo qualquer indicação contrária, são cerâmicos.
Os capacitores C1, C2, C3, C4 e C5 não são do tipo polarizado. Sua ligação ao circuito é tranquila e não requer atenção no quesito polaridade. A única recomendação é com relação a C5, que deve ser do tipo poliéster. O capacitor C6 é do tipo eletrolítico e, portanto, possui polaridade. Veja atentamente na figura 3 a maneira correta de soldá-lo ao circuito (polaridade).
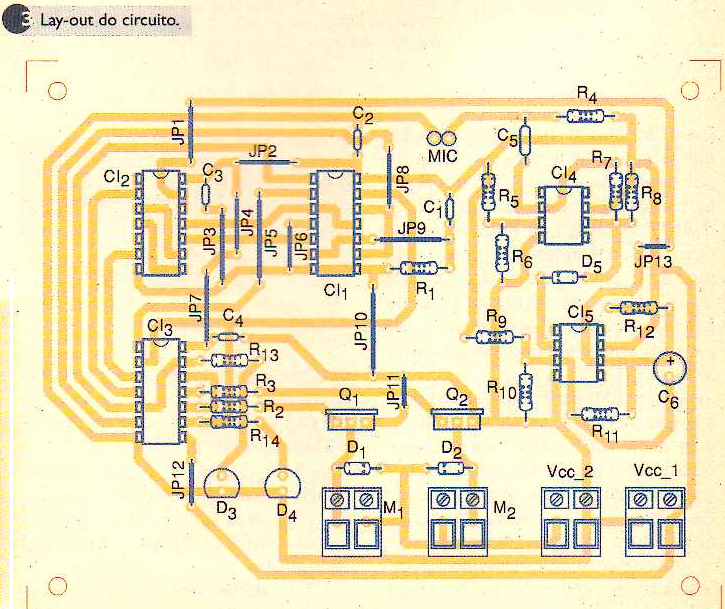
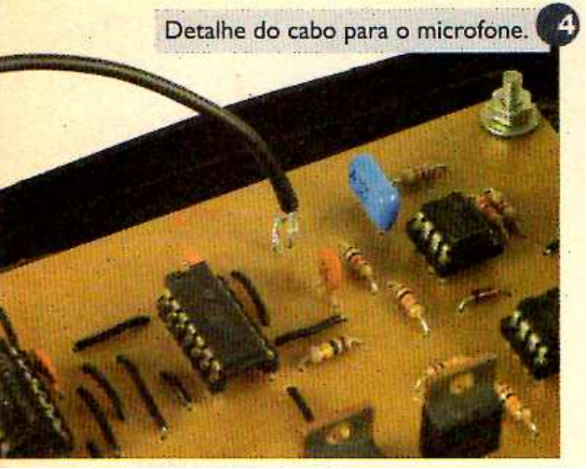
O microfone (MIC1) é do tipo "eletreto" de dois terminais. Nenhum outro é admitido nesta montagem. Para ligá-lo ao circuito utilize um cabo com malha mono para áudio. Evite cabos paralelos ou qualquer outro tipo ao indicado. Lembre-se que se trata de uma etapa de áudio e a captação de ruídos pode inviabilizar o uso do circuito. A malha do cabo deve ser ligada ao ponto de "massa" (terra) do microfone (ponto ligado a carcaça) e ao "terra" da placa, conforme indicado no circuito e na figura 3. O comprimento deste cabo não deve ultrapassar 20 cm. Observe o detalhe do cabo na figura 4.
Os LEDs, dependendo da montagem, necessitarão de cabos de extensão para a montagem dos mesmos no chassi. Para esse cabo, qualquer fio fino e maleável pode ser utilizado. Evite cabos rijos neste tipo de montagem. Repare na figura 5.

Os capacitores C7 e C8 não estão presentes na placa, pois os mesmos foram soldados diretamente sobre os terminais dos motores, conforme figura 6.

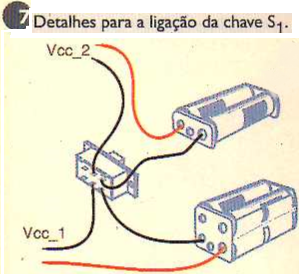
A chave S1 foi ligada de maneira a interligar os cabos pretos ("-") de cada um dos suportes de pilha utilizados no circuito para Vcc_1 e Vcc_2. Na figura 7 o leitor tem os detalhes para esta ligação.
Motores com alto consumo de corrente farão os transistores Q1 e Q2 aquecerem e, neste caso, é recomendado o uso de radiadores de calor para os transistores. É claro que se este for o caso, muito provavelmente o leitor deverá substituir as pilhas utilizadas na alimentação destes por uma bateria recarregável com um fator "Ah" adequado ao consumo dos motores e ao tempo de operação desejada.
MONTAGEM MECÂNICA
A montagem mecânica de nosso protótipo foi feita com um pedaço de plástico retirado de uma "prancheta" fora de uso, com 190 mm x 140 mm (comprimento x largura) e 3 mm de espessura.
O "case" superior foi aproveitado de um pote de sorvete reaproveitado. A tampa do mesmo foi parafusada à base plástica. Na parte superior foram feitos três furos para a montagem do microfone e dos LEDs. Os LEDs devem ser montados no chassi de forma que seja possível visualizar os valores binários informados na tabela 1. Isso ajuda no efeito visual e também na compreensão do estado atual do robô (comando executado). Para isso, D3 deve ficar sempre a esquerda de D4. Um outro detalhe sobre a montagem diz respeito ao microfone. Este deve preferencialmente ficar no topo do chassi construído. Desta forma a captação do sinal será facilitada. A chave S1 foi montada na parte inferior do robô. Na figura 8 o leitor pode ver alguns detalhes do nosso protótipo.

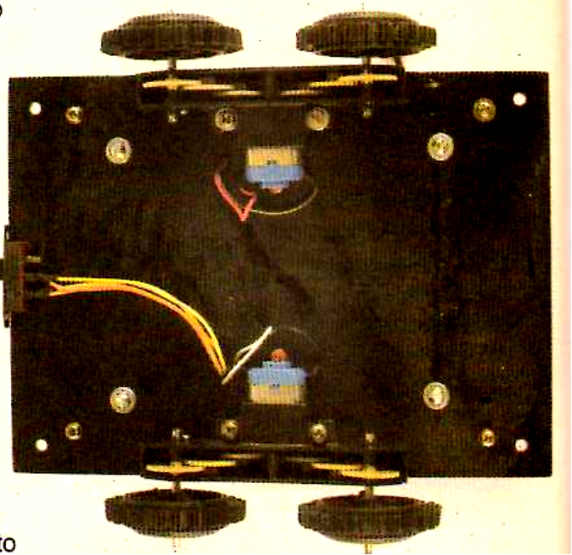

Os motores utilizados foram retirados de brinquedos fora de uso. Preferimos adotar a alimentação separada para os motores, para evitar interferência no circuito de controle e também devido ao fato dos motores requererem alimentação de 3 VDC.
O uso de motores e caixas de redução deste tipo permite um sensível barateamento na montagem, mantendo uma boa qualidade na mesma. Caso o leitor prefira, poderá utilizar caixas de redução específicas para montagens robóticas como as comercializadas pela Internet.
Importante
O leitor deve ter em mente que a montagem mecânica não precisa seguir exatamente o demonstrado no artigo (medidas, peças, etc). Tudo vai depender do material que cada um tem em mãos. Medidas, posição de furos, etc, são itens relativos e próprios de cada montagem. Preferimos deixar nosso leitor livre para realizar sua própria montagem, detalhando apenas os itens mais relevantes nesta montagem.
TESTE E USO
Antes de iniciar os testes, como é de praxe, recomenda-se uma minuciosa revisão em todas as ligações, placa, soldas, etc. É preferível perder alguns minutos em um "check-up" da montagem a perder horas tentando entender porque o circuito não funciona.
Para testar o robô, basta inserir as pilhas nos suportes e ligar a chave S1. Se tudo correu bem o LED "D3" deverá acender com D4 apagado. Se o leitor disponibilizou corretamente os LEDs, o número binário "10" poderá ser lido nos LEDs ("1" para LED aceso e "0" para o LED apagado). Neste "estado" o robô permanecerá parado.
Estale os dedos ou bata palmas uma vez para o "estado" dos LEDs mudar para "11" (ambos acesos). Os motores M1 e M2 deverão ligar e o robô deverá se movimentar para frente (ajuste as ligações dos mesmos à placa, caso perceba alguma troca nos sentidos dos mesmos).
Com mais um "estímulo" (bater de palmas ou estalar dos dedos) o robô deverá novamente parar. Ambos os LEDs estarão agora apagados, indicando o valor "00" no contador (estado). Outro estímulo e o valor "01" poderá ser visto nos LEDs e apenas M1 será ligado. Isso faz com que o robô gire sobre um círculo, com centro em M2 (motor parado). Este é o movimento que faz o robô virar. Com mais um estímulo, os LEDs voltam ao estado inicial "10" e um novo ciclo pode ser iniciado.
AJUDA COM PROBLEMAS
A seguir, listamos algumas dicas que poderão ajudar nossos leitores, caso se deparem com algum problema:
Meu robô não funciona. Bato palmas, estalo os dedos e nada acontece! Ele não se mexe!
- Verifique a alimentação (pilhas e posição das mesmas).
- Cheque a ligação dos suportes de pilha ao circuito.
- Verifique se não trocou Cl1, Cl2 e CI3 entre eles. Qualquer troca e o circuito não funcionará.
- Confirme se o microfone MIC1 foi corretamente ligado. (O microfone é polarizado! Veja o texto). - Cheque toda a montagem e a confecção da placa. Procure por trilhas e ilhas desconectadas, soldas frias, etc.
Meu robô funciona mas parece doido, não anda para frente e gira no próprio eixo!
- Inverta a posição dos fios de M1 ou M2. Os fios a serem invertidos serão aqueles do motor que gira ao contrário do movimento desejado.
Meu robô, ao girar, faz o movimento para trás!
- Esse efeito é obtido pela troca das ligações entre M1 e M2. Ele não afeta o funcionamento do robô. Para corrigir troque as ligações entre M1 e M2, inclusive a fiação (positivo com negativo) de cada um. Neste caso, a traseira do seu robô agora será a frente, e a frente à parte traseira.
SUGESTÕES DE USO
O leitor poderá, como sugestão de uso, promover competições entre dois ou mais robôs. Construa uma pista com obstáculos. Cada participante deverá desviar dos obstáculos sem tocá-los. Ganha quem chegar ao final da pista no menor tempo.
Uma outra dica para a mesma competição é iniciar a prova com uma pontuação fixa qualquer e descontar pontos ao tocar um obstáculo. A cada toque um valor é descontado da pontuação inicial. Ganha aquele que chegar no final com o maior número de pontos e, portanto, o que tiver o menor número de toque nos obstáculos.
Outra competição interessante seria "juntar" ambas as dicas e promover uma prova considerando o menor tempo e a maior pontuação obtida (menor número de descontos na pontuação inicial).
CONCLUSÃO
O robô apresentado neste artigo é bem simples, mas como foi dito pode ser utilizado de várias maneiras, indo desde uma demonstração da aplicação de circuitos lógicos ao seu uso por simples prazer e diversão: O mais importante é perceber que é possível construir um robô simples, usando circuito lógicos de baixo custo. Esperamos que esta montagem possa ser usufruída por muitos. Boa montagem e até a próxima!