









Há algum tempo nossos leitores esperavam por uma montagem simples, barata e interessante. É assim que descrevemos o Robô Rastreador. Um robô capaz de seguir o traçado de uma linha sem a ajuda de microcontroladores e/ou circuitos lógicos digitais complexos. Os componentes usados na montagem do Robô Rastreador limitam-se apenas a alguns transistores (quatro no total), alguns resistores, diodos, fototransistores, Leds IR comuns e dois motores. Uma montagem simples que irá atender desde o leitor iniciante até o leitor mais experiente.
Nota: Este artigo foi publicado numa Mecatrônica Fácil de maio de 2004
O conceito do Robô Rastreador é bem simples. Ele possui dois sensores voltados para a parte de baixo de seu chassi. Estes sensores foram dispostos para diferenciar duas cores básicas: o preto e o branco. Assim, é possível fazer com que o robô "siga" ou "rastreie" o traçado da linha.
A figura 1 demonstra como o robô diferencia ambas as cores. Quando o sensor identifica a cor branca existe sinal, na cor preta o sinal não existe mais.
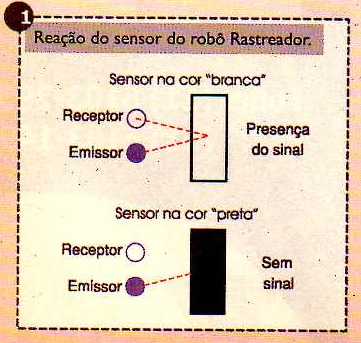
Vamos compreender como isso foi feito. O sensor foi montado com um LED IR (emissor de infravermelho) e um fototransistor. Estes estão posicionados de maneira que seja possível ao fototransistor "enxergar" a emissão dos raios infravermelhos do LED por reflexão. A cor branca atua mais ou menos como um "espelho", refletindo o sinal IR do LED para o transistor e a cor preta impede a reflexão. Por isso, dizemos que o sensor "reflete" o branco e "não reflete" o preto. Assim, o sensor pode informar ao circuito qual cor ele está "vendo".
Com base nisso o leitor pode concluir que seria possível construir vários tipos de sensores. Veja a figura 2.
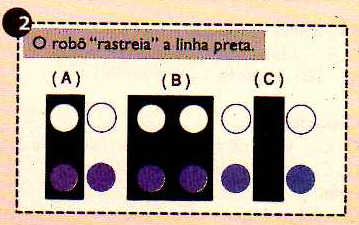
No exemplo (A) temos um sensor que poderia seguir uma linha por uma das bordas. O sensor mais a esquerda seguiria a parte escura da linha e o sensor à direita a parte branca. Assim sendo, o sensor que foi posicionado para responder à "cor escura" avisaria o circuito sobre um possível desvio para a cor branca, e o sensor para "cor branca" faria justamente o contrário.
Um outro exemplo é dado em (B). Ambos os sensores são posicionados para responder sobre um desvio para a cor branca, pois são posicionados sobre a cor preta.
Para nosso robô selecionamos a opção (C). Ambos os sensores são posicionados sobre a cor branca e respondem sobre um provável desvio para a cor preta.
Os dois tipos de sensores possuem suas vantagens e desvantagens. No caso do sensor (A) a linha não precisa de uma largura específica como para os sensores (B) e (C), porém qualquer "pista" desenvolvida para este não poderia ter cruzamentos.
O sensor (B) possui como vantagem principal o fato de sua pista poder ser construída com cruzamentos, porém sua desvantagem é o dimensionamento da largura da trilha que deve ser bem justo a distância dos sensores.
Para o sensor (C) as vantagens são não precisar de uma largura justa, pois a trilha pode ser feita considerando um valor máximo e mínimo (isso será detalhado mais à frente neste artigo) e também com um pequeno "macete" a pista poderá ter cruzamentos. Além destas vantagens, o tipo de montagem é mais simples, pois como ambos os sensores operam da mesma forma, o circuito é do tipo "dobrado" (o mesmo tipo de controle para ambos os lados).
Porém, devemos alertar que estamos falando do posicionamento dos sensores e isso não significa que nosso robô funcionará com qualquer um. O robô foi desenvolvido, conforme dito, para o sensor exemplificado na figura 2C e não funcionaria com os outros tipos. Seriam necessárias algumas modificações no circuito.
O CIRCUITO
Agora, compreendido como o robô "rastreia" a linha, vamos ao detalhamento do circuito. Observe a figura 3.
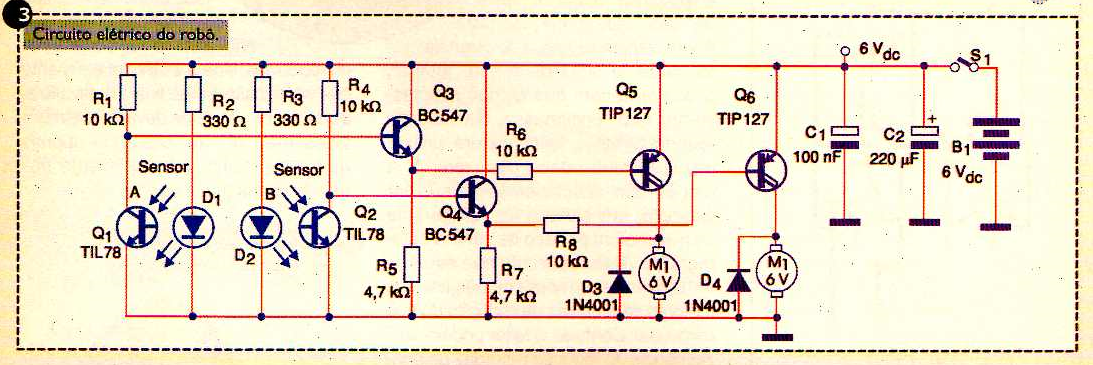
Os LEDs D1 e D2 são emissores de infravermelho e Q1 e Q2 são fototransistores. D1 é posicionado de maneira a compor um sensor com Q1. Quando Q1 recebe o sinal de D1, refletido pela a cor branca, este entra em condução levando Q3 ao corte (corrente Ic = 0). Assim Q5 é polarizado de maneira direta pelo resistor R5 e passa, portanto, a conduzir (presença de corrente Ic), fazendo o motor "girar". Esta análise é válida também para D2, Q2, Q4, R7 e Q6.
Todavia, quando o conjunto D1 e Q1 (ou D2 e Q2) são posicionados sobre a cor preta, não existe mais a reflexão dos raios infravermelhos de D1 e Q2 é levado ao corte. Quando isso acontece, Q3 passa a conduzir, polarizado por R1 levando Q5 ao corte. Neste momento, o motor para de girar.
A partir dessa análise pode-se entender que o robô "segue" a linha preta de maneira externa, ou seja, o robô realiza os desvios ao detectar que um de seus sensores está sobre a linha, contornando a mesma.
Alguns dos conceitos acima podem ficar um tanto obscuros, principalmente se o leitor não conhecer muito bem como operam os transistores. Neste caso, podemos passar o seguinte conceito básico:
Um transistor NPN "conduz" quando a tensão aplicada em sua base é positiva (maior que zero) e um transistor PNP o faz quando a tensão aplicada a sua base é negativa ou zero volts. Este conceito é básico e estamos considerando a operação do transistor como "chave" (corte e saturação) apenas. Suas características de amplificação não estão sendo analisadas.
Acreditamos que para uma compreensão maior do circuito, o conhecimento sobre transistores deva ser "ampliado". Para isso, o leitor poderá ler o artigo "Conheça os transistores" de Newton C. Braga, publicado na edição n9-15 de março/abril de 2004.
Os diodos D3 e D4 protegem os transistores Q5 e Q6 contracorrentes reversas, provocadas pelo motor. Os capacitores C1 e C2 são filtros para o circuito. A alimentação é feita através de quatro pilhas pequenas (6 VDC). A chave S1 liga/desliga o circuito (robô).
A MONTAGEM
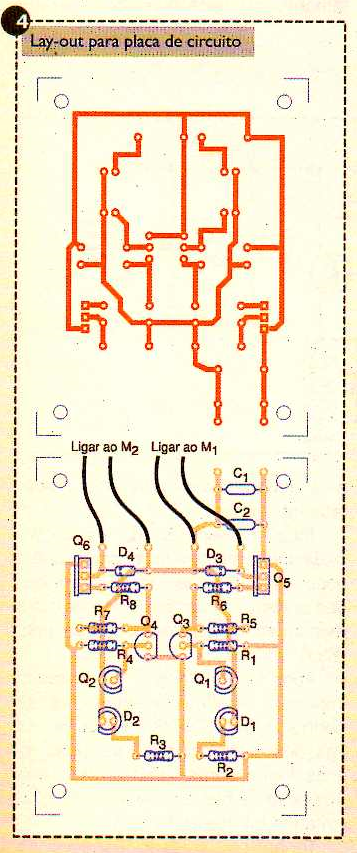
Na figura 4 o leitor tem o "lay-out" para confecção do circuito impresso do robô. Pela primeira vez unimos a montagem eletrônica à montagem mecânica do robô. Isso porque a própria placa de circuito impresso assumirá também o papel do chassi do robô. Lembrando sempre que isso é válido apenas para as montagens que forem reproduzir exatamente nosso protótipo. Para os leitores que desejam desenvolver seu próprio chassi, o tamanho da placa a ser considerado está marcado com uma linha tracejada na figura.
Toda a descrição da montagem dada doravante será feita com base em nosso protótipo, mas as dicas fornecidas poderão ajudar em qualquer outra montagem (chassi desenvolvido pelo leitor).
Após a confecção do circuito impresso, verifique atentamente se nenhuma trilha foi esquecida, se as ligações estão corretas, se todas as ilhas foram contempladas, etc. Uma inspeção na placa pode ajudar muito, evitando futuros problemas.
Tenha um cuidado especial ao soldar os transistores, diodos e o capacitor C1. Estes componentes são polarizados, e caso sejam montados na placa de forma invertida o robô não funcionará.
Importante: Para os leitores que não sabem como confeccionar uma placa aconselhamos uma leitura do artigo "Como confeccionar placas de circuito impresso" publicado na edição n°12 de setembro/ outubro de 2003. Caso o leitor não possua essa edição, poderá adquiri-la junto a Editora através do cite http://www.saberrnarketing.com.br ou através do fone 11-6195-5330.
Os sensores formados por D1 e Q1 (sensor A) e D2 e Q2 (sensor B) devem ser montados voltados para baixo (lado da solda). Veja a figura 5. Porém, o leitor deve seguir exatamente a figura 4 para realizar a montagem, considerando que os componentes serão soldados do lado da solda da placa. Tenha atenção com o "chanfro" existente nestes componentes para realizar a montagem com sucesso. Não corte ainda os terminais que sobrarem para o lado de cima. Durante a regulagem do ângulo de reflexão talvez seja necessário abaixar mais os mesmos. A sobra dos terminais ajudará nesta tarefa.
Um outro detalhe muito importante demonstrado na figura 5 é o uso de dois pequenos pedaços de termo contrátil de 1/8 de polegada envolvendo os LEDs transmissores. Isso é de suma importância, pois somente assim é possível dirigir o feixe de raios infravermelhos para frente, evitando que o fototransistor capte o sinal de forma "lateral", o que faria com que o 'robô simplesmente não funcionasse. Na falta do termo contrátil o leitor deverá utilizar qualquer tubo opaco para realizar a função que descrevemos como, por exemplo, um canudo de refrigerante ou mesmo um pedaço de caneta esferográfica (a transparente não serve!).

Utilizamos em nossa montagem dois motores com caixas de redução do tipo comercial. Contudo, o leitor poderá utilizar caixas de redução retiradas de brinquedos baratos ou fora de uso. Este "recurso" já foi empregado em outros robôs publicados nesta revista. O uso de materiais alternativos já foi e continuará sendo amplamente discutido aqui. Aconselhamos a todos que na medida do possível, completem sua coleção da Revista Mecatrônica Fácil, pois multas foram as dicas passadas em muitos artigos e projetos aqui publicados.
Para prender os motores o leitor poderá usar parafusos, cola quente, cinta plástica (usamos este recurso), fita adesiva dupla face, etc. Tudo dependerá do tipo do motor escolhido. Na figura 6, o leitor tem os detalhes do método utilizado em nosso protótipo.

Apenas aconselhamos que estes sejam posicionados na parte traseira da placa (parte maior) e que o eixo formado pelas rodas fique perpendicular ao centro "imaginário" dos sensores. Atente para a figura 7.
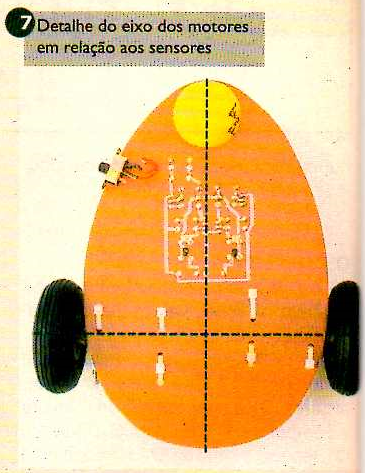
Observando essa figura, o leitor nota que posicionamos os motores na parte superior da placa, 1 porém ele poderá colocá-los na parte inferior do chassi. Tudo dependerá do tipo do motor disponível. Isso não afeta o funcionamento do robô. Mas, é necessário ter em mente que neste caso o robô ficará mais alto e, portanto, os sensores deverão ser montados mais abaixo, bastando apenas aproveitar melhor o comprimento dos terminais dos mesmos.
Para a cobertura de nosso robô utilizamos uma fôrma para ovo de páscoa de 750 g (figura 8). Mais uma vez, os materiais "alternativos" (também conhecidos como sucata) estão presentes em nossas montagens. Fique atento ao seu redor, pois muitas das coisas que vão parar no lixo poderiam ser úteis em uma montagem. Não existe limite para a criatividade!
Os cortes para o encaixe dos motores dependem exclusivamente do tipo, tamanho e posição dos motores adotados no chassi. E sendo assim, cada um deverá fazê-lo usando o bom senso e também visando o melhor acabamento.
Importante-2: O uso da fôrma para ovo de páscoa caseiro é apenas uma sugestão. Muitos outros materiais podem ser aplicados como, por exemplo, uma garrafa "PET" de refrigerante de 2 litros.
Não pintamos nosso protótipo, pois acreditamos que deixá-lo transparente daria um melhor acabamento. Sabemos, porém, que cada um escolherá o melhor acabamento para o seu robô.
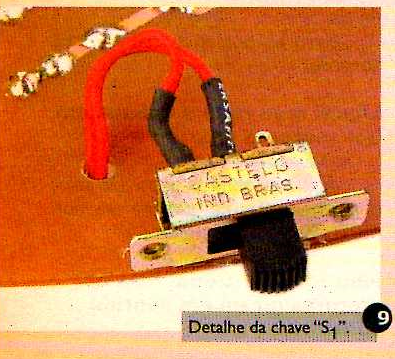
O suporte de pilhas e a cobertura do nosso robô foram presos com auxílio de fita dupla face. A chave "S1" foi presa na parte inferior do chassi com "cola quente" (figura 9).
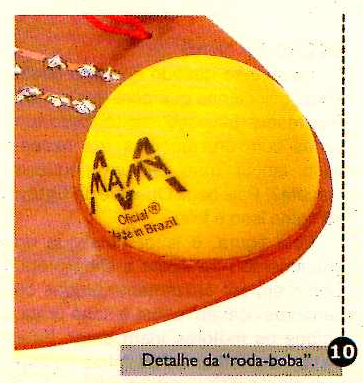
A terceira "roda" (ou "roda boba") do nosso protótipo foi construída usando a metade de uma "bolinha de ping-pong", facilmente encontrada em papelarias, supermercados, armarinhos, etc. Para prendê-la ao chassi utilizamos "cola quente" (figura 10). Esta "roda boba" é na verdade um apoio para a parte frontal do robô impedindo que os sensores raspem na "pista", e também confere a altura ideal para os mesmos.
AJUSTE DOS SENSORES
O ajuste dos sensores do Robô Rastreador não é crítico, mas requer atenção. Dissemos anteriormente que os mesmos operam por reflexão. Sendo assim, eles devem ser posicionados de maneira que o raio emitido pelo diodo IR seja refletido no papel e captado pelo fototransistor de cada grupo (sensor A ou B).
Em nossos testes obtivemos bons resultados com os sensores posicionados com distâncias entre 0,5 cm a 1 cm do solo. A inclinação em D1, D2, Q1 e Q2 deve ser feita de maneira a obter-se a reflexão. Veja a figura 11.
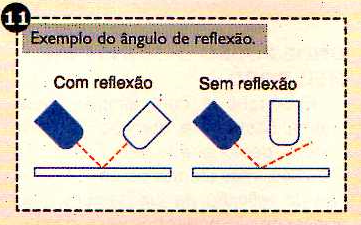
Caso o leitor mantenha o sensor a uma distância maior ou ainda menor, o ângulo de reflexão irá se alterar. Esta distância deve ser testada para proporcionar a melhor reflexão e, portanto, a melhor atuação do elemento sensor.
Como é um pouco complicado obter este ângulo através de cálculos, aconselhamos que o mesmo seja feito de maneira empírica. Para isso, desligue os motores da placa e solde um LED comum com um resistor limitador de corrente conforme descrito na figura 12, no lugar de cada um dos motores.
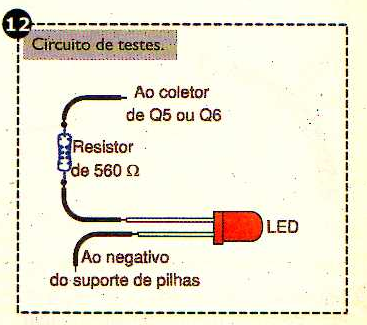
Assim, o leitor poderá posicionar o robô sobre um papel branco e ir ajustando o ângulo de cada um dos componentes até obter a reflexão. Quando isso acontecer, os LEDs de teste irão se acender com máximo brilho, comprovando a reflexão.
Teste também sobre um pedaço de papel preto (este pode ser feito com um pedaço de fita isolante). Os LEDs deverão apagar quando o sensor for posicionado sobre este. Este ajuste é de suma importância para o perfeito funcionamento do robô, porém ele será feito apenas uma única vez, e retocado posteriormente na pista apenas se (e quando) necessário (eventuais choques durante o transporte ou mesmo ao guardar o robô, podem alterar o ângulo previamente configurado).
PROVA E USO
Para testar o seu robô não é necessária a construção de uma pista. Pegue um pedaço de papel branco e cole um pedaço de fita isolante preta no mesmo. Agora vire o robô de "ponta-cabeça", ligue-o e posicione o papel de maneira que o pedaço de fita fique entre os sensores. Verifique se os motores estão girando. Aproxime ou afaste o papel até observar o giro dos mesmos. Talvez seja necessário um pequeno ajuste nos sensores conforme descrito anteriormente. Feito todos os ajustes, os motores sobre o branco deveram girar e parar sobre o preto da fita.
Agora que o funcionamento foi comprovado, é hora de fazer uma pista. Na figura 13 o leitor tem um exemplo de arco de curva e um segmento de reta. A largura de ambos é de 15 mm. O arco de curva tem raio externo de 120 mm e interno de 105 mm. Este arco foi o que melhor se adaptou ao nosso protótipo. Curvas com arcos muito acentuados podem 'travar" o robô.
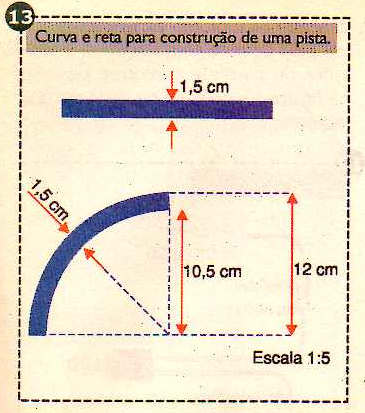
Importante-3: Caso o leitor monte um protótipo diferente do demonstrado aqui, deverá realizar testes para verificar qual o valor mínimo para o arco de curva que o seu robô aceitará.
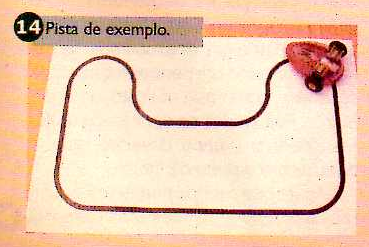
Construa uma pista como a demonstrada na figura 14. Esta pista é a mesma utilizada em nossos testes (nada impede que o leitor faça a sua, apenas respeitando o arco e a largura máximos passados). Para isso faça um "gabarito" com as informações contidas na figura 13 ou, se preferir, faça o download no site da revista (www.mecatronicafacil.com.br). Corte os exemplos passados e use-os para traçar a pista sobre uma cartolina branca. Após traçar a pista, a mesma deve ser pintada. Em nossa pista-protótipo usamos tinta plástica preta. Esta tinta é facilmente adquirida em papelarias e armarinhos.
Coloque a pista no chão e o robô sobre a mesma. Ligue-o. Observe seu comportamento. Se em algum momento ele sair fora do traçado, ajuste os sensores (ângulo de reflexão) conforme descrito.
DICAS EXTRAS
Lembra-se quando no início deste artigo colocamos que para que o robô Rastreador pudesse ser utilizado em pistas com cruzamentos era necessário lançar mão de um pequeno macete?! Pois bem. Observe na figura 15 como isso é feito.
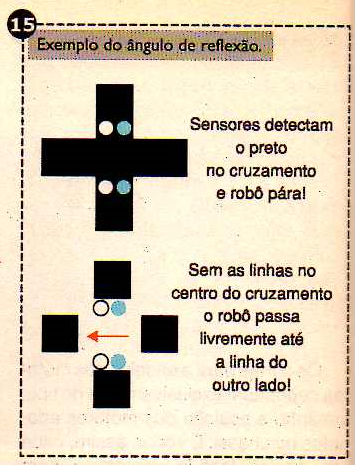
Pela figura, o leitor nota que no cruzamento não existe a linha preta. Como em um cruzamento ambos os sensores ficariam sobre a linha preta, ambos os motores iriam parar. Para evitar isso, retiramos as linhas do cruzamento. Assim sendo, o robô poderá cruzá-la sem maiores problemas. Bem simples!
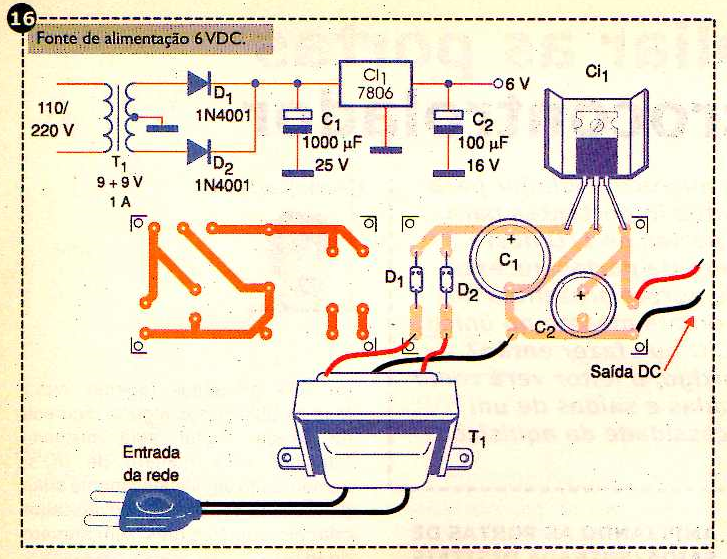
Uma outra dica é sobre a alimentação do robô. Ela é feita com quatro pilhas pequenas tipo "AA". Caso o leitor deseje utilizar o robô por longos períodos, as pilhas podem mostrar-se ineficientes. Nessa situação, o uso de uma fonte externa de 6 VDC é o mais recomendado. Na figura 16 o leitor tem o exemplo de uma fonte de 6 VDC regulados com corrente de até 1 A. Note que, aqui o fio que leva a alimentação até o robô deve ficar suspenso de forma a não atrapalhar os seus movimentos.
ONDE POSSO DEMONSTRAR MEU ROBÔ
Este robô é bem simples, mas chama bastante a atenção. O leitor poderá demonstrá-lo em Feiras de Ciências, ressaltando as características da reflexão da luz (lembre-se que, apesar de não podermos vê-lo, o infravermelho também faz parte do espectro da luz).
Também poderá fazê-lo em Feiras de Eletrônica, onde o funcionamento dos sensores, transistores e outros componentes seriam detalhados a uma "banca examinadora".
Um robô como este também pode ser colocado na "vitrine" de uma loja ou de um "estande de feira". Ele chamaria muito a atenção de quem passasse em frente. O leitor pode então pensar no aluguel do seu pequeno robô, para angariar fundos para suas próximas montagens! •
AJUDA COM PROBLEMAS
Abaixo, listamos alguns pontos observados em nosso laboratório e que com certeza ajudarão na solução de problemas:
Liguei meu robô e nada aconteceu!
Possíveis soluções:
- Verifique se as pilhas foram colocadas corretamente no suporte.
- Verifique se a chave S1 está ligada.
- Verifique a posição dos sensores (se ligados invertidos, o robô não funcionará).
- Verifique se os transistores, diodos ou "C1" não foram ligados invertidos.
- Coloque o robô sobre uma folha branca/preta e verifique o funcionamento.
- Reveja o ângulo de reflexão dos sensores.
Liguei meu robô e apenas um dos motores liga!
Possíveis soluções:
- Verifique todas as possíveis soluções apontadas na questão anterior, para o lado que não funciona.
Meu robô funciona, mas os motores giram em sentido contrário!
Possíveis soluções:
- Inverta os fios de ligação do motor que parece girar para o lado contrário. Ambos devem girar de modo a mover o robô para a frente.
Meu robô funciona, mas ao encontrar uma curva ele passa direto!
Possíveis soluções:
- Ajuste o ângulo de reflexão do sensor que estiver do lado interno da curva. - Refaça os ajustes para os sensores, conforme descrito.
- Verifique se a largura da trilha na curva não está fora do passado (15 mm). Trilhas muito grossas ou muito finas podem provocar isto:
Fiz todos os ajustes para o ângulo, mas a reflexão parece não acontecer!
Possíveis soluções:
- Verifique se os fototransistores e LEDs IR não estão ligados de maneira invertida
- Verifique se a altura dos elementos sensores não está alta ou baixa demais. Modifique a altura até obter a reflexão necessária.
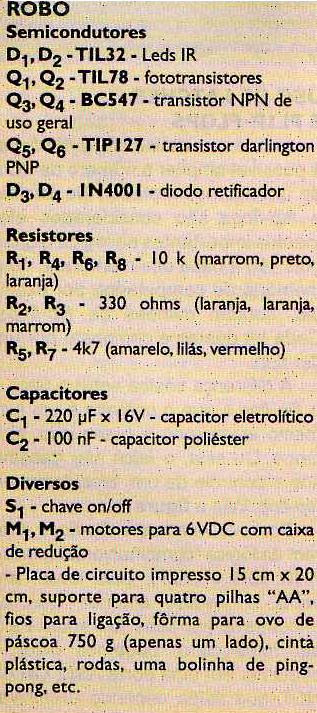
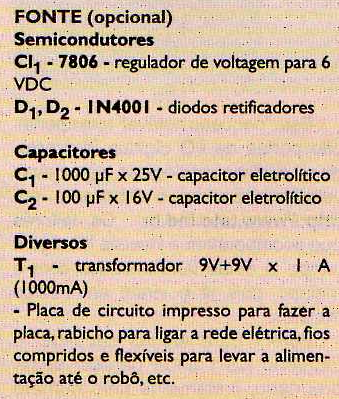
Lista de Material:
CONCLUSÃO
Neste artigo, o leitor aprendeu que é possível montar um robô apenas empregando alguns conceitos já trabalhados em outras edições (transistores) e também alguns novos, aqui passados. Esperamos que estes conceitos, agora exemplificados na prática, possam ser utilizados também em outras montagens de nossos leitores, afinal "conceito é o que fica!" Até a próxima!










