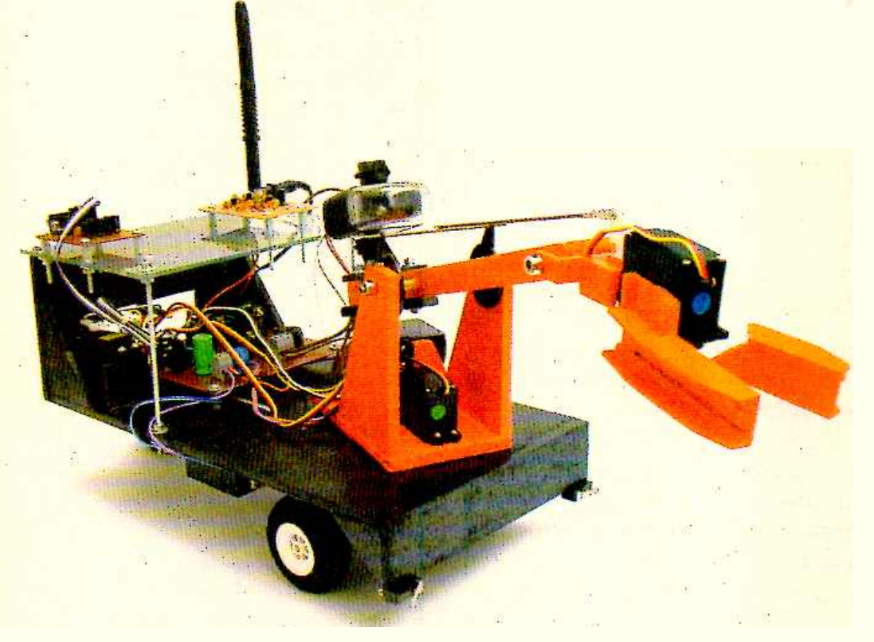
Há algum tempo temos desenvolvido nossos robôs com microcontroladores do tipo "embedded" e durante este período nossos leitores sempre nos solicitaram uma solução utilizando um microcontrolador comum (sem os recursos dos microcontroladores embedded). O robô explorador vem atender aos muitos pedidos recebidos. Trata-se de um robô controlado por um microcontrolador PIC16F628A, com muitos recursos interessantes.
Márcio José Soares
https://www.arnerobotics.com.br/
Nota: O artigo é de 2004 tendo sido publicado numa Mecatrônica Fácil. Links e sites indicados são da época, não estando mais ativos atualmente (2020) na recuperação deste artigo.
O robô explorador possui alguns recursos interessantes, a saber:
- Controle de um pequeno braço manipulador com dois graus de liberdade;
- Controle de um motor através de uma ponte "H" com transistores bipolares;
- Controle de direção; - Uma câmera PB transmitindo imagens através do canal 12 VHF;
- Controle de uma lâmpada externa auxiliar;
- Dois "bumpers" de colisão;
- Um "buzzer" para sinalização;
- Uma saída extra através de mie (contatos NA e NF presentes);
- Uma entrada digital extra (5 VDC) para uso com sensores IR, som, etc;
- Conexão através do canal serial com velocidade entre 1200 e 19200 bps (alteração via software). Todos estes recursos são comandados em tempo real por meio do canal serial de um PC (RS-232) através de um programa desenvolvido em linguagem LOGO.
Pelo que o leitor poderá notar, este robô tem muitas possibilidades. Os resultados que podem ser obtidos com ele em feiras e outras apresentações serão excelentes.
SOBRE O MICROCONTROLADOR PIC16F628A
Para alguns leitores, este microcontrolador não é nenhuma novidade. Porém para aqueles que não o conhecem, descreveremos suas principais características:
- Memória FLASH de programa com 2 kbytes;
- 224 bytes de RAM;
- 128 de EEPROM;
- 15 pinos de I/O com dreno de corrente na ordem de 20 mA;
- Dois comparadores analógicos;
- Dois "timers" de 8 bits e um de 16 bits;
- Um canal CCP (Capture, Compare and PWM);
- Um canal USART para comunicação RS-232 ou SPI;
- Várias opções para oscilador inclusive interno a4 MHz;
- Watch Dog Timer (cão de guarda) interno;
- Controle de "Power-on Reset" e "Power-up Timer";
- Proteção de código contra cópias;
- Código de instruções reduzido (35 instruções);
- Encapsulamento DIP com 18 pinos.
Para aqueles que desejam mais informações sobre este microcontrolador, aconselhamos o "download" do "databook" no site do fabricante, www.microchip.com.
O CIRCUITO
Na figura 1 o leitor tem o circuito elétrico do robô explorador. Todo o controle é feito pelo microcontrolador. Os servos SRV2 a SRV4, controlam o braço manipulador e o servo SRV1 a "bequilha" utilizada para controle da direção.
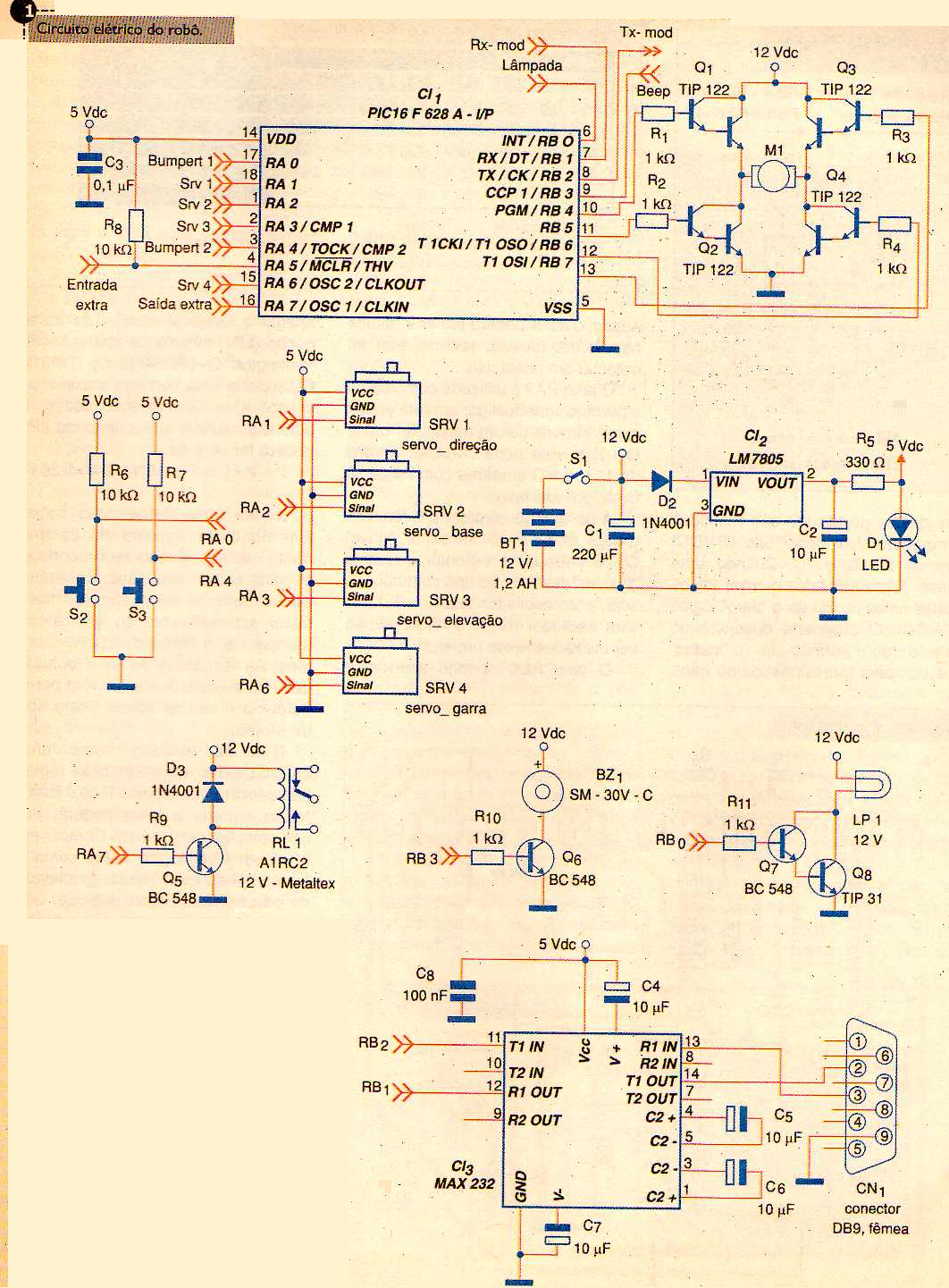
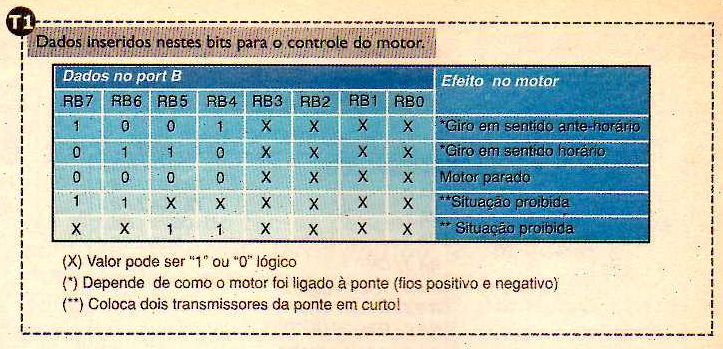
O motor M1 é controlado através de uma ponte "H", formada por Qi, Q2, 03 e 04. Esta ponte é controlada diretamente pelo microcontrolador através dos bits mais significativos da porta "B" (R134 a RB7). Na tabela 1 temos os dados inseridos nestes bits para o controle do motor. Observando atentamente a tabela 1 e o circuito elétrico da figura 1, o leitor poderá compreender os efeitos do microcontrolador sobre a ponte "H". Veja os detalhes na figura 2. As chaves S2 e S3 ligadas a RAO e RA4, respectivamente, são na verdade "bumpers" de colisão utilizados para detecção de degraus. Os estados destas portas I/O são mantidos sempre em nível lógico "alto" (5 VDC) através de R6 e R7. Quando uma chave é pressionada, o nível lógico nestes pinos de I/0 vai a "zero" lógico (0 VDC). O programa desenvolvido para o robô permite ler o "status" dos bumpers (pressionados ou não).
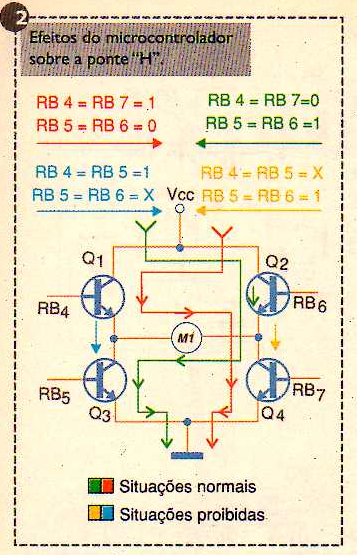
Assim, o leitor poderá tomar á atitude necessária (desvio, retorno, etc) ao detectar um obstáculo.
O pino RA7 é utilizado como saída e permite ligar/desligar um relé (saída extra) através de um transistor "drive" Q5. Este relé pode controlar cargas de 12 V por 3 ampères com bastante folga, por exemplo.
A porta RB3 controla um "buzzer" (beep) através do transistor "drive" Q6. É importante salientar que este "buzzer" deve ser do tipo contínuo, ou seja, com oscilador interno. Buzzers sem oscilador interno não poderão ser utilizados neste projeto!
O pino RB0 permite acender e apagar a lâmpada auxiliar de navegação (LP1) através da configuração "darlington" Q7 (BC548) e Q8 (TIP31). Q8 suporta uma corrente máxima de coletor lC = 3 A. Sendo assim, a potência máxima que a lâmpada LP1 poderá ter será de:
P = V x I => P = 12V x 3 A => 36W
Porém, acreditamos que trabalhar no limite máximo do componente não seja o mais recomendado e para evitar situações de superaquecimento e até queima do transistor, aconselhamos ao leitor à não ultrapassar o limite de 20 W máximos. As lâmpadas de 12 V colocadas nos painéis de carros têm baixa potência e são as ideais neste tipo de projeto.
RA5 foi utilizado como uma entrada extra, ativa em nível lógico baixo (exatamente. Como RA0 e RA4). Nesta entrada o leitor poderá, por exemplo, ligar um sensor IR que seja ativo em nível lógico baixo como o sensor IR do robô Lixobô (publicado na edição 18) ou outro qualquer que se comporte da maneira explicada (ativo em nível lógico baixo - O VDC). Sensores do tipo "coletor aberto" são os mais recomendados para esta entrada.
A entrada e saída extra foram implementadas para permitir ao leitor ligar dispositivos a sua escolha (dentro dos limites estabelecidos), permitindo uma personalização e até a execução de tarefas diferentes das propostas para o robô (não existem limites para a criatividade!)
Todo o circuito é alimentado por uma bateria de 12 VDC GEL com 1,3 Ah. Esta bateria alimentará de forma direta a lâmpada, o relé, o buzzer e o motor. Ela também poderá servir de alimentação para o dispositivo extra de saída (no relé) caso sua alimentação seja compatível com esta tensão.
O circuito prevê ainda um regulador de voltagem para 5 VDC (Cl2). Os capacitores C1 e C2 funcionam como filtros para a alimentação. D2 permite uma proteção "a mais" contra uma possível inversão ao ligar a bateria. R5 e D1 formam a, indicação visual da presença da alimentação (5 VDC).
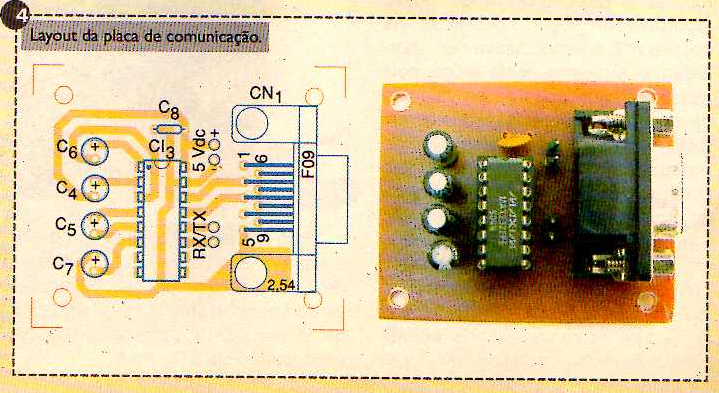
Temos ainda CI3 no circuito. Trata-se de um MAX232 (ou qualquer outro compatível). Este Cl adapta os níveis de tensão da norma RS-232 para os níveis TTL (0 e 5 VDC) do microcontrolador. É através deste Cl que o cérebro (microcontrolador) do Robô Explorador se comunicará com o PC (canal serial). O leitor deve ter notado a ausência do cristal de oscilação, muito comum aos microcontroladores. O PIC16F628A possui um oscilador R/C interno com boa precisão. Optamos por usá-lo e assim conseguimos a liberação de mais dois pinos de I/0.
Importante
Tenha muito cuidado ao ligar uma placa à outra. Caso os fios que levam a alimentação à placa de comunicação sejam invertidos, o CI3 se danificará irremediavelmente. Cuidado! Observe atentamente as figuras e fotos deste artigo para conectar corretamente ambas as placas. Os fios de comunicação também merecem cuidado, mas sua inversão não provocará a queima de qualquer um dos Cls, mas impedirá a comunicação entre o robô e o PC. Tenha cuidado neste item também!
MONTAGEM ELETRÔNICA
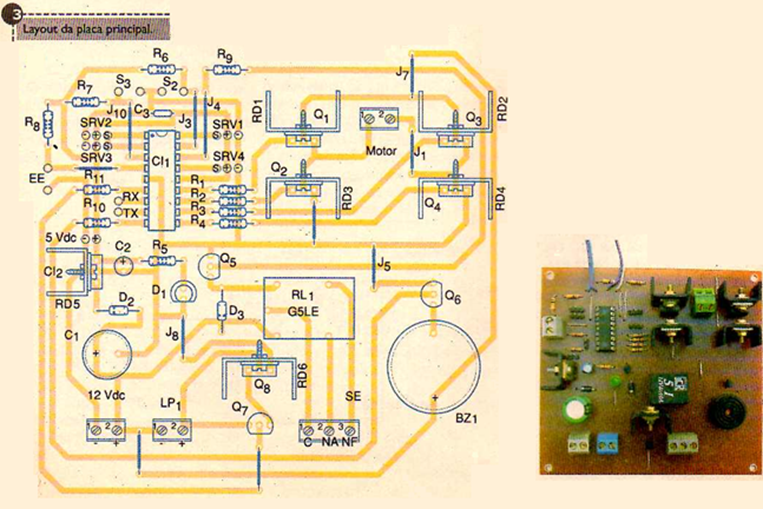
Nas figuras 3 e 4 o leitor encontra nossa sugestão para a confecção dos circuitos impressos para a placa principal (cérebro) e placa de comunicação, respectivamente, do nosso robô. Aconselhamos o uso de soquetes para todos os Cls (exceto Cl2), principalmente para o microcontrolador.
Tenha muito cuidado ao soldar os componentes polarizados como capacitores eletrolíticos, diodos e LEDs, transistores, reguladores de voltagem (Cl2), buzzer e outros. Qualquer inversão poderá ser fatal para o componente e/ou impedir o funcionamento do robô.
Os transistores Q1 a Q4 e também Q8 necessitam de radiadores de calor, pois dissipam uma certa potência. A mesma recomendação é válida para o regulador de voltagem Cl2.
Para os servos aconselhamos o uso de uma barra de pinos para a sua fácil inserção na placa. Caso o leitor tenha dificuldade em encontrá-las em sua cidade, poderá cortar o conector original dos servos e soldar diretamente os fios na placa. Lembre-se apenas de que o comprimento dos fios que controlam o braço manipulador deve ser tal que permita o livre movimento deste.
A ligação entre a placa principal e a placa de comunicação (alimentação e comunicação) também pode ser feita com barra de pinos. Na falta desta, os fios poderão ser soldados diretamente na placa.
Para a ligação da lâmpada, do motor, da saída e entrada extra e a entrada da alimentação utilizamos em nosso protótipo conectores do tipo aparafusável, também conhecidos como conectores PTR500. Estes conectores ajudam muito nas conexões e facilitam qualquer montagem e desmontagem (se necessário). Seu uso é opcional.
Importante : Chamamos a atenção do leitor para o nível de complexidade desta montagem eletrônica. Ela envolve um microcontrolador PIC e será necessário algum conhecimento prévio no uso destes (compilação de programas, gravação e outras) para o sucesso da montagem. Não recomendamos esta montagem para leitores iniciantes e/ou sem a experiência adequada no mundo dos microcontroladores. Em nossas páginas existem outros projetos interessantes e em outras edições é possível encontrar robôs mais simples que este. É aconselhável dar um passo por vez!
O CABO DE COMUNICAÇÃO
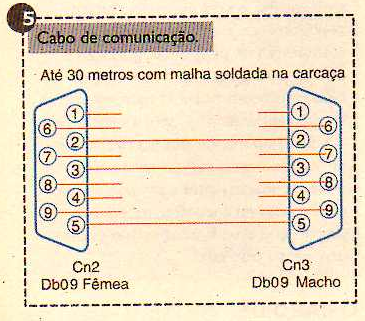
A montagem do cabo de comunicação é bem simples. O leitor irá utilizar alguns metros de cabo do tipo "manga" com pelo menos quatro vias e dois conectores DB09 (um macho e outro fêmea).
A norma RS-232 determina que um cabo de comunicação serial deva ter no máximo 15 metros para uma comunicação segura. Porém, se o leitor utilizar um cabo blindado de boa qualidade e soldar as pontas da malha na carcaça dos conectores em ambos os lados, esta distância poderá chegar a 30 metros.
Não recomendamos o uso de cabos utilizados na montagem de redes ou ainda o tipo “flat”. No primeiro caso, estes cabos não são flexíveis e podem prejudicar os movimentos do seu robô. No segundo caso, as interferências irradiadas pelo cabo podem prejudicar a comunicação.
Monte o cabo conforme a figura 5 de acordo com a metragem passada. Se notar qualquer problema na comunicação, diminua o cabo para um comprimento seguro.
É importante: Após realizar toda a montagem eletrônica, aconselhamos urna boa verificação para ter certeza que todas as ligações foram feitas corretamente! É melhor perder um certo tempo verificando tudo, do que ver todo o trabalho se perder por um erro qualquer!
MONTAGEM MECÂNICA.
A montagem mecânica deste robô não é das mais simples, mas também não é das mais complexas. Ela exigirá do leitor alguma experiência com serras, furadeiras elétricas, colas e outros. Caso o leitor não tenha experiência na utilização destes materiais, peça ajuda para alguém mais experiente.
A montagem do manipulador deste robô já foi descrita no artigo "Robô Maniputador RM-1" publicado na edição e sendo assim não abordaremos a mesma neste artigo, pois nossos leitores poderão se valer da descrição e desenhos expostos no referido artigo. Para aqueles que não possuem a revista, inserimos em nosso site o material referente à montagem mecânica do manipulador.
Nosso protótipo foi desenvolvido em madeira (manipulador e chassi), com exceção da plataforma superior, que foi montada com um pedaço de acrílico de 3 mm aproveitado de uma prancheta escolar, adquirida em papelarias e lojas do ramo. Porém o leitor poderá utilizar o material que achar mais conveniente. Em nosso site, ele encontrará todas as medidas das peças devidamente cotadas, tanto para o manipulador como para o chassi do robô.
Nas figuras 6 e 7 demonstramos como fixamos a lâmpada e a câmera de vídeo ao manipulador. Acreditamos ser esta a solução mais interessante, pois assim é possível guiar o robô, com o manipulador voltado para frente e também ao operar o braço ver o que estamos "manipulando". O "case" utilizado para abrigar a lâmpada é uma caixa de sinalização (caixa para estrobo) da Patola, código SI-1V. A câmera usada foi adquirida junto a Tato Equipamentos Eletrônicos, porém qualquer câmera com saída RCA, empregada em circuito interno de segurança, poderá ser usada neste robô (figura 8).


Para prender o conjunto "lâmpada e câmera" utilizamos dois parafusos de 3 mm de espessura com 60 mm de comprimento e uma base de madeira de 50 mm por 30 mm com 4 mm de espessura. Veja a figura 9.

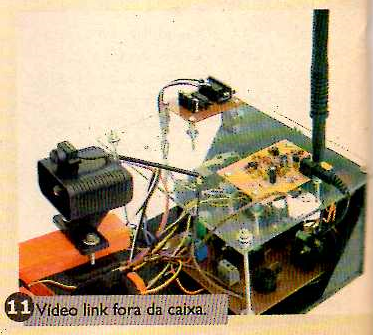
O link de comunicação para a câmera (figura 10) foi instalado na plataforma superior (base de acrílico) do robô. Preferimos retirar o equipamento de sua caixa para realizar a sua instalação (figura 11).
Este recurso só é aconselhável, caso o leitor tenha alguma experiência em eletrônica. E lembre-se que isto pode remover a "garantia" do equipamento. Sendo assim, os leitores que preferirem poderão simplesmente montar o equipamento dentro de sua caixa em seus robôs e apenas realizar as ligações à câmera e bateria do robô, conforme o manual de instruções fornecido pelo fabricante do vídeo link.
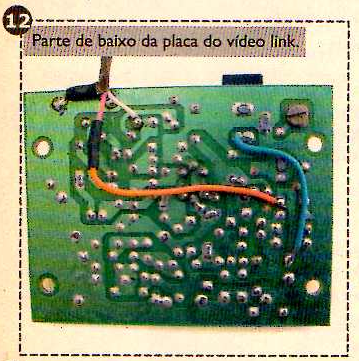
Caso o leitor opte por remover o vídeo link de sua caixa, poderá ligá-lo à câmera usando os próprios conectores fornecidos com ambas ou ainda soldar os fios de maneira direta. Para isso, basta remover os conectores e promover as emendas necessárias. A chave "H-H" (liga/desliga) do "Vídeo Link" também pode ser removida. Veja a figura 12. Ela detalha as ligações feitas por baixo da placa para a ligação da câmera e também para a retirada da chave.
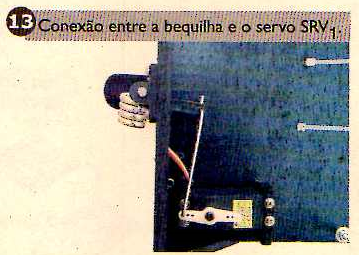
O sistema de direção do robô foi feito com uma bequilha dianteira para aeromodelos. A mesma é facilmente encontrada em lojas de aeromodelismo. A ligação entre a bequilha e o servo SRV1 foi feita através de um arame de aço com 2 mm de espessura, dobrado em forma de "Z". A figura 13 ilustra esta conexão.
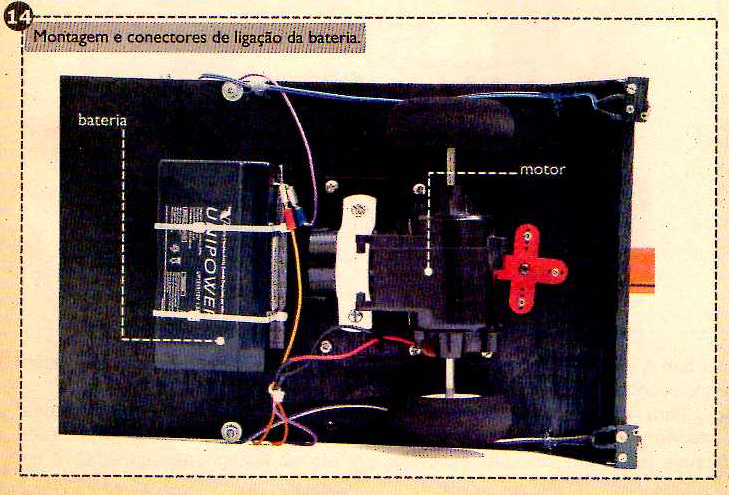
A bateria foi presa à base do robô com o auxílio de cintas plásticas (figura 14), porém o leitor poderá realizar sua fixação de outra maneira. Na mesma figura o leitor observa que utilizamos conectores para a ligação da bateria ao circuito (fios). Isso é extremamente recomendável, pois a bateria é do tipo recarregava' (o carregador pode ser adquirido na loja, junto com a bateria ou mesmo montado pelo leitor). Assim, fica bem mais fácil realizar a carga da bateria.
O motor colocado em nosso protótipo foi aproveitado de um brinquedo fora de uso (figura 14). Ele deve ser, preferencialmente, do tipo com rodas em ambas as pontas do eixo. A fixação deste motor irá variar de caso a caso e o leitor terá de estudar o tipo de motor que tem em mãos para proceder a sua fixação da melhor maneira possível. Em nosso caso recorremos a uma braçadeira comercial de 3/4 de polegada.
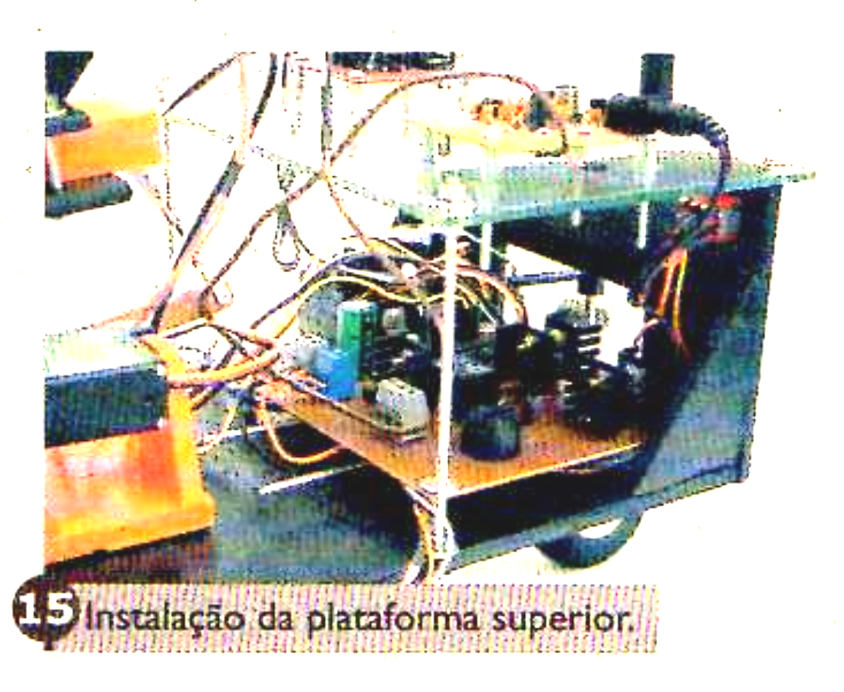
A fixação da plataforma superior foi feita com dois pedaços de haste "roscada" de 3 mm de espessura com 12 cm de comprimento na parte frontal. A parte traseira foi fixada na extensão superior do chassi utilizando parafusos de madeira. Veja a figura 15.
As montagens das chaves S2 e S3 (bumpers de colisão) foram feitas na parte frontal inferior do chassi (figura 16). As mesmas ajudarão a detectar obstáculos abaixo da linha de visão da câmera, como pequenos degraus e ou saliências no terreno.

Importante : A montagem mecânica de qualquer robô é bastante peculiar. Tudo depende do material, ferramentas e recursos disponíveis. O mais importante é o leitor ter em mente que a montagem não precisa ser exatamente a sugerida no nosso protótipo. Cada um pode realizar uma montagem diferente, considerando apenas os conceitos gerais envolvidos e levando em conta os recursos disponíveis.
O PROTOCOLO DE COMUNICAÇÃO
Sempre que pensamos em comunicação entre um dispositivo de "controle" e um dispositivo "controlado" é preciso entender sobre o protocolo de comunicação utilizado. Um protocolo de comunicação define o que o "elemento receptor" deve fazer com os dados recebidos do "elemento transmissor". Atualmente estamos cercados por inúmeros equipamentos que utilizam protocolos para a sua comunicação. Por exemplo, nossos computadores utilizam o protocolo TCP/IP para a comunicação na Internet.
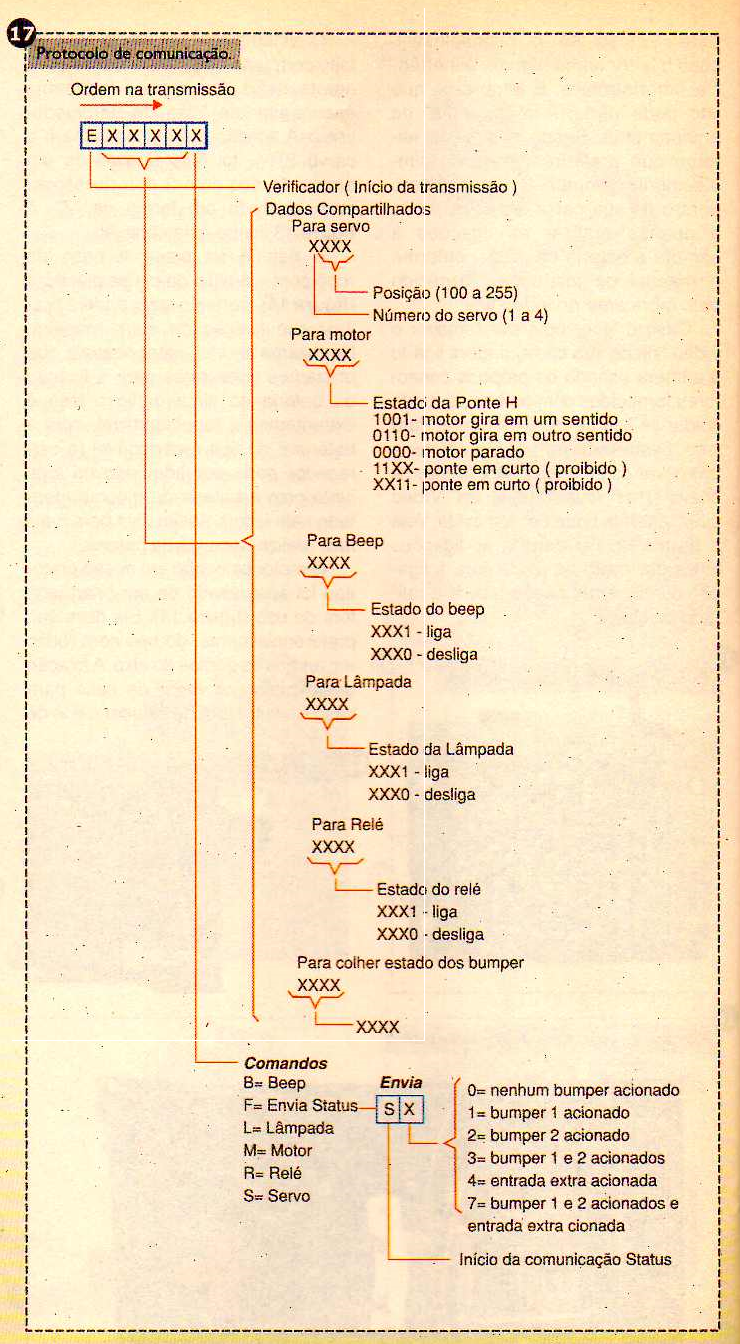
Caso o leitor deseje implementar o programa de controle no PC em uma outra linguagem, deverá se valer do protocolo utilizado. Ele é bem simples. A figura 17 o detalha bem. Temos um caractere de início ("E") e mais 5 caracteres que podem variar entre números e letras.
É bom o leitor ter em mente que estes caracteres são tratados no formato ASCII, tanto no robô (programa ROBO_EXPLORADOR.ASM) como também no PC (programa ROBO_EXPLORADOR.LGO).
Importante : Programas feitos na linguagem assembler são um pouco mais difíceis de serem interpretados, se comparados a outras linguagens. Para o entendimento do programa assembler do robô será necessária alguma experiência com a linguagem assembler Mícrochip®. Caso o leitor não a tenha, aconselhamos o estudo das instruções detalhadas na edição n°8.
A PROGRAMAÇÃO (SOFTWARE DE CONTROLE)
São dois os programas necessários para o uso do Robô Explorador. O primeiro deles é o ROBO_EXPLORADOR.ASM. Este programa deve ser gravado no microcontrolador PIC16F628A (atenção para o sufixo "Al!!).
É necessário um gravador para a linha de microcontroladores PIC da Microchip. Na edição n° 13 publicamos um gravador que poderá ser empregado para esta tarefa. Seu uso também foi descrito na referida edição e não trataremos disso nesta edição. Consideraremos que o leitor que se propôs a montar o Robô Explorador já tem experiência necessária com microcontroladores PIC.
Para facilitar, em nosso site (www.mecatronicafacil.com.br) além das fontes também é possível encontrar o código HEX (arquivo para gravação no microcontrolador).
O funcionamento do programa ROBO_EXPLORADOR.ASM pode ser visto no fluxograma apresentado na figura 18. Para ajudar ainda mais a compreensão do programa, o mesmo foi ricamente comentado.
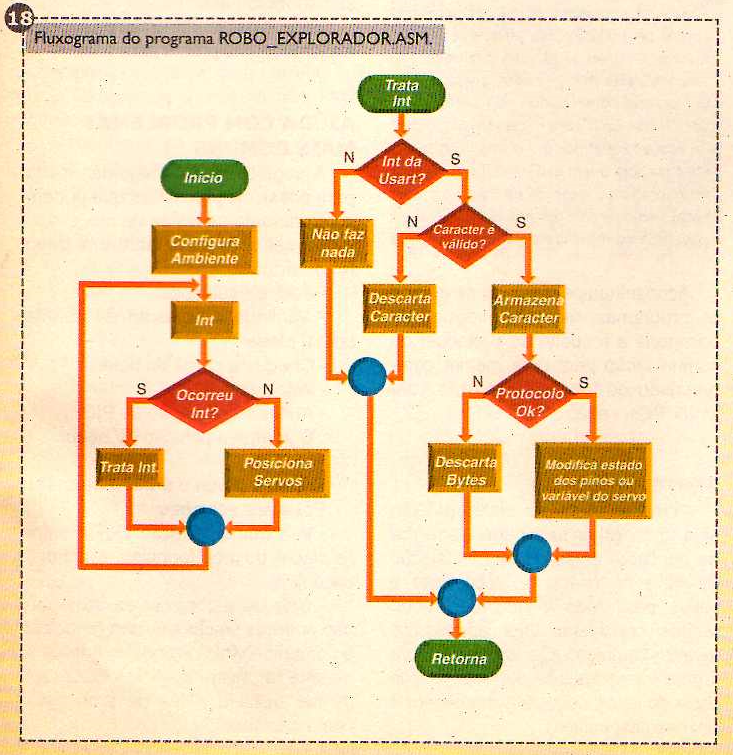
O funcionamento do programa é bem simples. Primeiramente, ele define as variáveis de memória que serão utilizadas. Após isto, é determinado como serão configurados os pinos de I/O e os vários registradores de controle dos periféricos (conversores analógicos, USART, etc.). Feitas as devidas configurações, o programa limpa os pinos de controle do buzzer, lâmpada, motor e saída extra (todos desligados), e "seta" os valores iniciais para os servos.
Após o processo de "inicialização", o programa entrará em-um "loop" para o tratamento dos servos. Os dados recebidos pela USART serão tratados por interrupção, facilitando bastante o controle. Assim, não é preciso checar o canal serial para verificar se chegou algum dado.
Quando uni dado é recebido, ele compara com os caracteres previamente estabelecidos no protocolo de comunicação. Se os mesmos forem válidos, ele os armazena em variáveis e segue até que o comando esteja completo (número de caracteres recebidos). Uma vez recebido o comando, uma ação é feita:
- Ligar o motor em um sentido ou outro, ou ainda desligá-lo;
- Mudar o valor de posicionamento de um servo qualquer;
- Acender ou apagar a lâmpada auxiliar;
- Ligar ou desligar o buzzer,
- Ligar ou desligar o relé (saída extra);
- Ler o estado atual dos bumpers e da entrada extra e enviar ao PC.
O clock adotado para o PIC é interno de 4 MHz. Assim, temos a execução de uma instrução a cada 1 µs (0,000001 segundos). Essa velocidade é suficiente para tratar todo o protocolo e controlar o robô de maneira bastante eficiente.
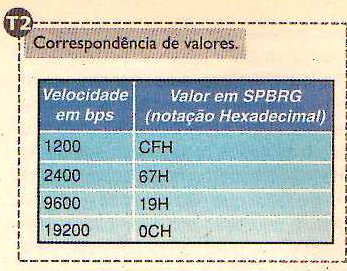
Um detalhe importante sobre o robô é a velocidade da comunicação serial adotada. Ela é de 2400 bps (bits por segundo). O leitor poderá alterar este valor, inserido dentro do registrador SPBRG, conforme a tabela 2. Lembrando apenas que estes valores são válidos apenas para o modo de comunicação "assíncrono", considerando a velocidade "setada" em modo "high" através do bit BRGH do registrador TXSTA e o microcontrolador operando com clock de 4MHz (interno ou externo).
O outro programa, a que nos referimos anteriormente, é o ROBO_EXPLORADOR.LGO. Este programa foi desenvolvido na linguagem LOGO e servirá para o controle do robô através do PC. Para executá-lo é necessário ter o Super LOGO instalado na máquina. Este programa pode ser obtido gratuitamente no site www.nied.unicamp.br.
A linguagem LOGO é muito utilizada no mundo todo, principalmente por professores. Ela é bem fácil de usar e muito intuitiva e poderosa. A Revista já utilizou este programa para o controle de outros robôs e publicou também uma série demonstrando seu uso e os vários recursos presentes na mesma. É extremamente aconselhável para o leitor que não conhece a linguagem, a aquisição dos exemplares com a série, na medida do possível, para que possa tirar o máximo proveito da linguagem, caso deseje fazer alguma alteração no programa original.
O programa Super LOGO foi desenvolvido para ser usado com o sistema operacional Windows 95/98/Me. Seu comportamento no Windows XP/2000 pode apresentar problemas. Isso porque o WinXP/2000 restringe o acesso as portas 1/0 do PC. Em nosso site é possível encon-trar dicas e um programa que per-mite liberar as portas do PC. Veja o link www.mecatronicafacil.com.br/ downloads/logo_instr.htm.
O funcionamento do programa está detalhado no fluxograma apresentado na figura 19. O programa também foi ricamente comentado para uma melhor compreensão do funcionamento do mesmo.
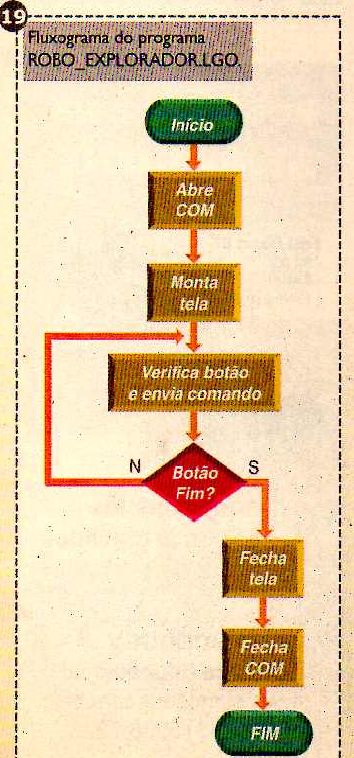
Seu funcionamento é bem simples. O programa abre o canal de comunicação serial do PC com endereço 3F8H (COM 1). Caso o leitor não tenha esta porta liberada, terá de alterar o programa para operar com uma outra qualquer que esteja livre.
Após a abertura da porta (caso algo saia errado, o programa LOGO emitirá um aviso) a tela de controle será formada. Ela possui botões para realizar todos os comandos do tipo "on/off' (lâmpada, buzzer, relé e motor) e barras de rolagem para posicionar os servos. Neste último caso, um botão "Enviar" deve ser pressionado para a atualização da posição dos servos no robô. Para os outros casos isso é feito de forma automática.
Na tela do programa também existem "Labels" com o estado atual dos bumpers (chaves S2 e S3 do robô) e também da entrada extra. Para saber sobre o seu estado, use o botão "Ler status".
Importante: Alguns microcomputadores possuem apenas uma única porta serial e se a mesma já estiver sendo utilizada pelo "mouse", esta máquina não poderá ser utilizada no controle do robô explorador. Nesse caso, será necessário a troca do mouse serial por um outro do tipo PS/2 (se esta porta estiver disponível no micro) ou a inserção de mais um canal serial através de uma placa extra adquirida no mercado especializado.
Aconselhamos o estudo de ambos os programas, mais as informações passadas a respeito do protocolo de comunicação para uma melhor compreensão do funcionamento do conjunto "PC + robô".
TESTE E USO
Acreditamos que o mais prudente seja testar primeiro a parte eletrônica na bancada, antes da sua instalação definitiva no chassi do robô (isso é válido para todo e qualquer robô). Vamos considerar aqui apenas os testes eletrônicos. Os testes de montagem mecânica são de responsabilidade do leitor, pois cada montagem é um caso específico.
Após todo o 'checkup" eletrônico, ligue a placa principal. Ela deverá emitir um beep por um segundo e logo em seguida cessá-lo. Caso algo pareça errado, recorra a "Ajuda com problemas" presente neste artigo.
Com tudo ok, após o "beep" os servos são centralizados. Conecte o cabo de comunicação (cordão umbilical) e rode o programa no Super LOGO. Se não houver nenhum problema com a porta serial do micro, a tela do programa irá abrir.
Utilize os botões presentes na tela do programa ROBO_EXPLORADOR. LGO para controlar as saídas digitais como: buzzer, lâmpada, relé e motor. Verifique se tudo está funcionando.
Cheque o posicionamento dos servos. Atue sobre as barras de rolagem e clique no botão enviar. Os servos deverão modificar seu posicionamento.
Após este “check" eletrônico e confirmado o funcionamento do mesmo, o leitor já poderá realizar a montagem das placas no chassi e realizar as "ligações" mecânicas. Confirme o curso dos servos, o sentido de rotação do motor, etc.
Se tudo estiver ok, então o seu robô explorador está pronto para o uso!
AJUDA COM PROBLEMAS MAIS COMUNS
A seguir, listamos algumas dicas para possíveis problemas que podem surgir durante os testes do robô:
Liguei a placa e nenhum beep foi ouvido!
Possíveis soluções:
- Verifique a conexão da bateria com a placa;
- Cheque a carga da bateria;
- Veja a chave S1;
- Analise a gravação do PIC;
- Confirme a posição do beep.
Liguei a placa e o beep dispara!
Possíveis soluções:
- Verifique a conexão TX/RX entre as placas do robô (principal e comunicação);
- Cheque a conexão da alimentação entre as placas do robô (principal e comunicação). Lembre-se que se a mesma foi invertida, o MAX232 terá de ser trocado antes de prosseguir com os testes.
Liguei a placa e é possível ouvir o beep durante 1 segundo, mas os servos não atuam! Possíveis soluções: - Verifique a ligação dos servos. Veja as figuras que ilustram o layout de circuito impresso, além das fotos aqui publicadas para ligá-los corretamente.
Liguei a placa principal e tudo parece estar bem, o beep é ouvido, os servos se posicionam, mas não consigo qualquer comunicação!
Possíveis soluções:
- Verifique se o cabo foi montado corretamente. São apenas três fios, mas qualquer inversão irá impedir o funcionamento do robô;
- Cheque se está utilizando o cabo correto. Os testes só são válidos se feitos com o cabo indicado neste artigo;
- Observe se não há rompimento no cabo ou qualquer outro problema como solda fria nos conectores;
- Veja o setup do PC para a porta serial.
A lâmpada parece não acender!
Possíveis soluções:
- Verifique se a ligação à placa principal (polaridade) está correta;
- Cheque se a mesma não está queimada;
- Verifique se a mesma tem a tensão indicada (12 VDC);
- Teste os transistores Q7 e Q8.
O relé não funciona!
Possíveis soluções:
- Verifique se o mesmo foi ligado corretamente;
- Cheque se a tensão da bobina é a indicada (12 VDC);
- Teste o transistor Q5.
Tudo está ok, menos o beep!
Possíveis soluções:
- Verifique a ligação (polaridade) do mesmo na placa;
Importante : Lembramos mais uma vez que esta montagem é um pouco mais complexa que as publicadas até o momento. Quanto maior o nível de complexidade de um projeto; maior deve ser o nível de atenção na montagem, testes e principalmente na busca de um possível problema!
- Cheque se o mesmo é do tipo contínuo (com oscilador interno), conforme o solicitado. Outros tipos não poderão ser utilizados neste projeto!
- Teste o transistor Q6.
O motor parece não funcionar!
Possíveis soluções:
- Verifique as ligações do mesmo;
- Cheque se a relação de redução está de acordo com o peso do robô;
- Teste os transistores Q1, Q2, Q3 e Q4.
CONCLUSÃO
Esta foi a nossa segunda montagem utilizando um microcontrolador PIC (a primeira foi feita na edição n213). Acreditamos ser esta a mais complexa até o momento. Sua complexidade e os avisos dados no artigo não devem desestimular os menos experientes. Pelo contrário, esta montagem é um desafio tanto para os mais experientes quanto para os menos experientes. Aconselhamos apenas para os "menos experientes" que busquem a ajuda de pessoas (amigos ou professores) com mais experiência para ajudá-los.
Esperamos ter contribuído com todos aqueles que buscavam por um projeto um pouco mais "complexo" e que agregasse informações sobre o microcontrolador PIC. Boa montagem e até a próxima!