









Apresentamos um projeto completo para um sistema de Controle Remoto Digital de 8 canais, modular, com amplas possibilidades de uso (principalmente em unidades robóticas), frequência de operação controlada a cristal, sem filtros e sem ajustes (podendo ser montado sem instrumentos especiais), codificação e decodificação com Cl's CMOS, de baixo consumo e fácil obtenção, etapas de potência transistorizadas e canal adicional de controle. Além da parte eletrônica, é apresentada a parte mecânica e instalação do conjunto numa unidade robótica móvel de demonstração.
Marco Antonio Marques de Souza
Nota: Artigo publicado na Revista Saber Eletrônica 221 de 1991
Os projetos de controle remoto envolvem, normalmente, grandes dificuldades de implementação, mesmo para os técnicos e montadores mais experientes. Essas dificuldades crescem proporcionalmente ao número de funções (canais) que se necessite acionar na unidade comandada. Assim, quase sempre, consegue-se resultados satisfatórios apenas em projetos de 1 ou 2 canais, destinados ao acionamento de modelos simples, como carros ou barcos de brinquedo, que, no entanto, não oferecem grandes atrativos em função das limitações de uso. Por outro lado, os projetos que poderiam oferecer resultados compensadores, com 3, 4, 5 ou mais canais, são difíceis de se desenvolver e implantar, exigindo muito conhecimento, trabalho e paciência do projetista, sem falar na necessidade de instrumentação sofisticada e cara.
Como conseguir, então, acionar unidades remotas sofisticadas, como por exemplo unidades robóticas, que exigem muitos canais, com um projeto viável e que possa ser executado sem a necessidade de aparelhos ou componentes sofisticados?
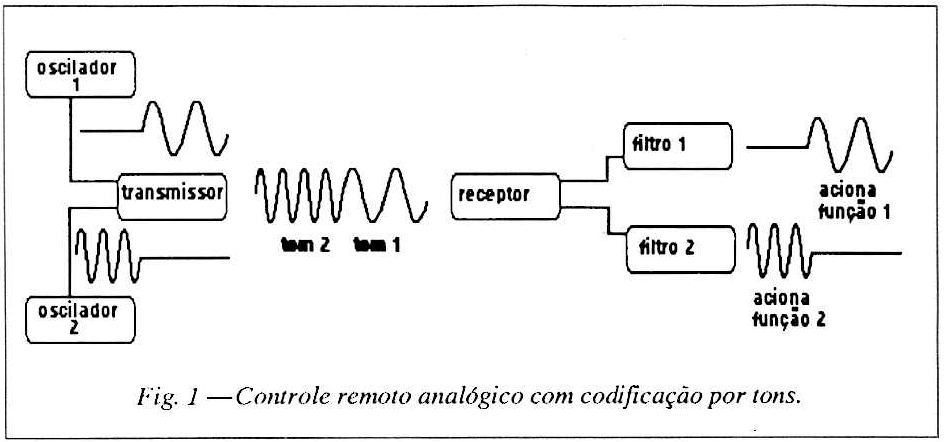
Para responder a essa pergunta, vamos analisar a principal causa de dificuldades na construção de controles remotos tradicionais, que chamaremos de analógicos. As dificuldades decorrem, principalmente, do tipo de codificação utilizada para identificar as funções a serem executadas. Nos controles remotos analógicos, essa codificação é feita atribuindo-se a cada canal uma determinada frequência de oscilação, denominada 'tom', produzida por osciladores de baixa frequência.
Assim, por exemplo, poderemos atribuir ao canal 1 um tom de 500 Hz, ao canal 2 um tom de 800 Hz, e assim por diante. No circuito decodificador, instalado na unidade comandada, esses tons devem ser separados, a fim de se identificar qual canal está sendo acionado. Esse trabalho é feito por filtros de frequência, do tipo passa-banda, que tem como característica amplificar uma determinada faixa de frequências e atenuar todas as demais. Na saída de cada filtro, só haverá sinal se aquele determinado tom tiver sido enviado pelo transmissor. Esse esquema está representado na figura 1.
Aqui já podemos perceber, então, as duas grandes dificuldades de se construir um controle remoto analógico para um grande número de canais:
• Para cada um dos canais será necessário adicionar-se um filtro no decodificador. Como os filtros são circuitos de difícil construção e ajuste, quanto maior o número de canais maiores serão as dificuldades de implementação.
• A sensibilidade dos filtros irá determinar a diferença mínima de frequência que poderá haver entre dois tons sucessivos. Se os filtros tiverem, por exemplo, uma banda passante de 500 Hz, dois tons sucessivos não poderão estar separados por menos de 500 Hz pois, neste caso, o filtro não conseguiria separá-los. Como filtros mais sensíveis são também mais difíceis de se construir, percebe-se que, de novo, quanto maior o número de canais maior será a complexidade e dificuldade de ajuste dos filtros.
CONTROLE REMOTO DIGITAL
Para eliminar essas dificuldades deve-se usar uma outra forma de codificação das funções a executar, eliminando-se a codificação por frequências e, consequentemente, a necessidade de filtros separadores.
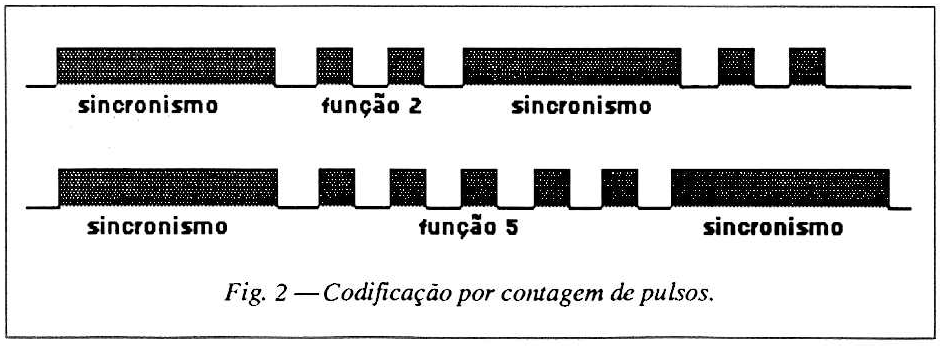
Os controles remotos digitais utilizam-se de pulsos para identificar os canais comandados, podendo separá-los pela largura do pulso enviado ou pela quantidade de pulsos. Em nosso caso, escolhemos a codificação pela quantidade de pulsos, de forma que se enviando 1 pulso aciona-se o canal 1, 2 pulsos o canal 2 e assim sucessivamente. Neste processo, os pulsos usados para identificar os canais têm a mesma duração e utiliza-se um pulso mais largo (pulso de sincronismo) para sincronizar o início da contagem dos pulsos de canal entre o transmissor e o receptor, conforme mostrado na fig. 2.
Com esse processo, pode-se construir controles remotos com vários canais com uma única frequência de modulação e um único filtro ou, como é o caso do projeto que apresentamos, sem nenhum filtro, utilizando-se os pulsos para modular diretamente o meio de transmissão - em nosso caso, um rádio controle, os pulsos modulam a frequência de rádio portadora (na faixa de 27 MHz).
Percebe-se também que, além da simplificação obtida, o processo de codificação por contagem de pulsos permite que se acione um número muito grande de funções na unidade comandada, bastando aumentar-se o número de pulsos enviados entre dois pulsos de sincronismo. O princípio de funcionamento dos circuitos codificador e decodificador é o mesmo, qualquer que seja o número de pulsos a ser enviado.
O PROJETO PARA 8 CANAIS
O projeto que apresentamos, possui as seguintes características principais:
• Modularidade. Dividido em módulos funcionais permitindo ao projetista utilizá-los da forma proposta ou em outros projetos, de acordo com as necessidades;
• Acionamento não-simultâneo de 8 canais. Os canais são de acionamento do tipo não-proporcional (tudo ou nada);
• Separação dos canais por codificação digital - contagem de pulsos, implementada com Cl's CMOS;
• Alta racionalização na lógica de funcionamento, com o uso de um único Cl para codificação e três para decodificação;
• Canal de controle, de acionamento constante, permitindo a detecção visual de funcionamento, através de led indicador na unidade comandada;
• Radio controle. Frequência de transmissão de 27 MHz, controlada a cristal.
• Módulos de potência de estado sólido, transistorizados, para acionamento de motores CC com correntes de até 500 mA.
Como dissemos acima, uma das principais características do projeto é sua modularidade. O projeto é apresentado completo, de forma a permitir sua montagem e colocação em funcionamento como proposto. Seus módulos, no entanto, poderão ser usados individualmente em projetos diferentes, adaptados às necessidades do projetista.
Os módulos de codificação e decodificação, cuja apresentação é o objetivo principal do artigo, poderão ser usados com outros tipos de controle remotos, como luz, ultrassom, infravermelho, etc., bem como com outros conjuntos transmissores-receptores de rádio frequência de maior potência. Os módulos de transmissão, recepção e potência, por sua vez, poderão ser aproveitados, futuramente, para implementação de codificações mais sofisticadas, como por exemplo, para acionamento de um maior número de canais. Poderão ser usados, também, para projetos com acionamento simultâneo dos canais e projetos de canais proporcionais.
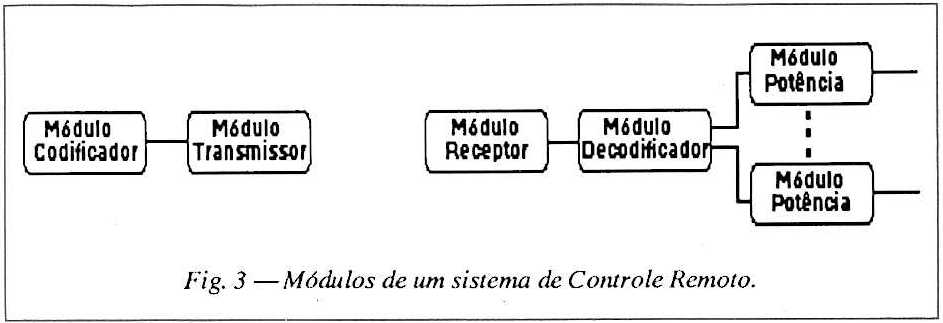
A modularidade foi conseguida dividindo-se um conjunto genérico completo de controle remoto em 5 módulos funcionais, conforme esquematizado na figura 3.
Resumidamente, cada módulo tem cor função:
- MODULO CODIFICADOR:
Responsável por transformar um comando do operador, normalmente acionamento de uma tecla, em uma sequência de sinais que possam ser decodificados e entendidos pela unidade controlada.
- MODULO TRANSMISSOR:
Responsável por enviar os sinais edificados à unidade controlada. Este envio é feito, normalmente, através de sequências de rádio, sinais luminosos, ultrassons ou infravermelho;
- MÓDULO RECEPTOR:
Recebe e amplifica os sinais enviados pelo transmissor.
- MÓDULO DECODIFICADOR:
Decodifica (separa) as ordens contidas nos sinais recebidos, oferecendo em suas saídas sinais que possam ativar ou não os módulos de potência a eles ligados.
- MÓDULOS DE POTENCIA:
Tem por função, uma vez acionados, gerar a energia necessária ao acionamento dos motores ou outros dispositivos eletromecânicos a eles ligados.
Vamos agora descrever, detalhadamente, cada um dos módulos citados para funcionamento com as características propostas.
- MÓDULO CODIFICADOR:
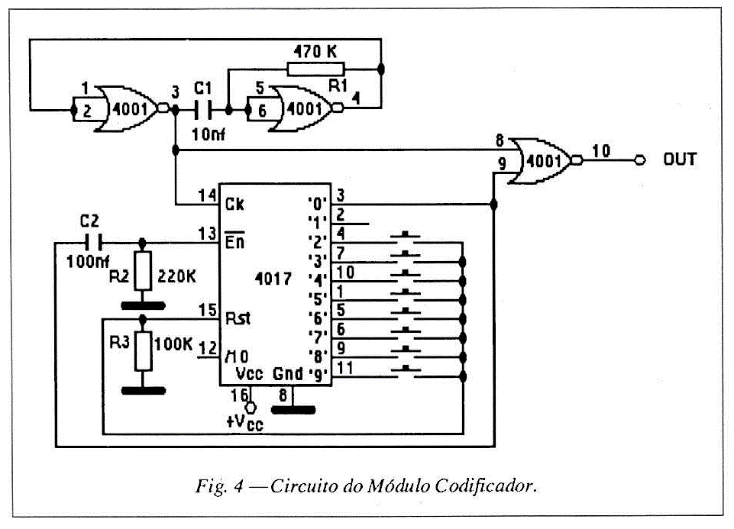
Como dissemos, este módulo é o módulo decodificador, são os objetivos principais do projeto, por permitirem o acionamento simplificado de um grande número de canais. Seu circuito completo é mostrado na figura 4, onde se pode perceber a extrema racionalização conseguida, pois todo o trabalho é feito por um único CI, o integrado 4017, apoiado por 3 portas NOR.
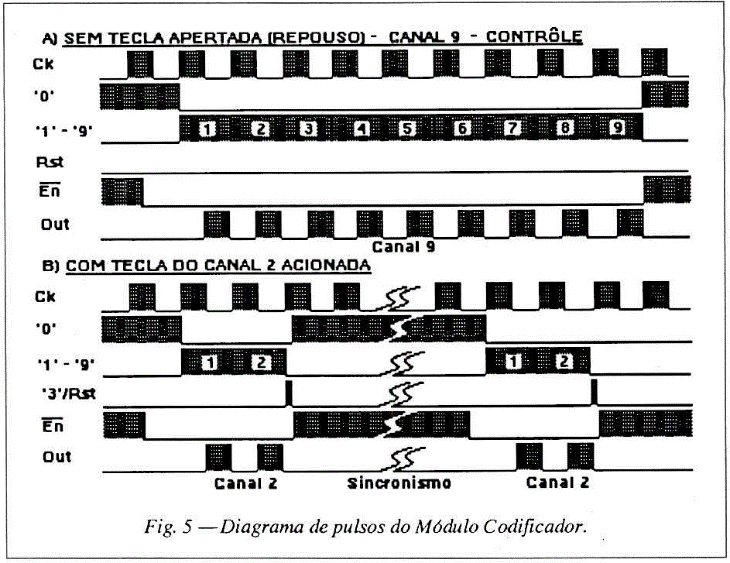
O circuito gera todos os sinais necessários à codificação da função a executar, conforme pode ser visto na figura 5, que apresenta o diagrama dos sinais encontrados em cada ponto do circuito. A partir do acionamento de uma das teclas, o circuito gera o pulso sincronismo e o número de pulsos correspondente ao canal desejado, até que a tecla seja solta. Quando nenhuma tecla estiver acionada, o circuito mantém ativado o canal 9, de controle, que é usado no receptor para fornecer uma indicação visual de recepção perfeita. O 4017 é um contador decimal com um decodificador 1-de 10 integrado, fazendo com que suas saídas '0' a '9' sejam acionadas sequencialmente, na medida em que a contagem evolui. O 'clock' do 4017 é fornecido por um oscilador constituído por duas portas NOR (4001), ligadas como inversores, e por R1/C1, que determinam a frequência de oscilação, dada pela fórmula, ou seja, uma frequência de aproximadamente 100 Hz.
F = 1 / 2,2 RC
que no nosso caso resultará em:
F = ½,2 x 470 x 103 x 10 x 10-9
F = 96,7 Hz
Os pulsos de clock são usados, também, para gerar os pulsos de acionamento dos canais na saída, estando ligados numa das entradas da porta NOR que gera a modulação para o circuito transmissor. A outra entrada dessa poria NOR está ligada à saída '0' do 4017 que controla a passagem dos pulsos de clock para o transmissor. Se a saída '0' estiver a nível lógico 1 os pulsos de clock não chegam ao transmissor (se gerará o pulso de sincronismo) e se estiver a nível lógico O os pulsos serão passados ao transmissor identificando o canal acionado.
A identificação do canal é feita mediante o acionamento das teclas ligadas às saídas '2' a '9' do 4017 (8 canais). Supondo-se que o contador esteja desbloqueado (EN -pino 13- a nível 0) os pulsos de clock farão com que as saídas '1', '2', '3', e assim sucessivamente, sejam ativadas (nível lógico 1).
Com a saída '0' desativada (nível 0) os pulsos de clock também estarão passando para a saída (OUT). Estando, por exemplo, a tecla ligada à saída '3' -pino 7- do 4017 acionada, esta saída estará ligada à entrada RST -pino 15-do contador. Quando esta saída for ativada, o contador será resetado, levando a saída '0' a nível 1, inibindo a passagem dos pulsos de clock para o transmissor e acionando o monoestável ligado na entrada EN -pino 13- do 4017, que irá bloquear a contagem pelo tempo controlado por R2/C2, de acordo com a equação:
T = 0,8RC
que resultado em:
T = 0,8 x 200 x 103 x 100 x 10-9
T = 0,0176 s
ou seja, aproximadamente 20 ms.
Esse tempo é a duração do pulso de sincronismo, pois a saída (OUT) ficará a nível O enquanto o contador permanecer bloqueado. Até que a saída correspondente à tecla acionada seja ativada, terão sido gerados na saída os pulsos que identificam o canal desejado - no caso da saída '3', 2 pulsos, indicando canal 2. Ao terminar o período de tempo do pulso de sincronismo, a entrada EN volta a nível 0 e na próxima subida do pulso de clock a contagem será reiniciada, gerando nova identificação de canal e assim sucessivamente.
Caso nenhuma tecla esteja acionada, com a entrada RST do 4017 mantida a nível O por R3, o ciclo de contagem será feito sem interrupção, gerando 9 pulsos até que a saída '0' volte a inibir a contagem e gerar o sincronismo. Assim, o canal 9 é um canal de repouso podendo ser usado para indicar ausência de tecla apertada. Em nosso caso, esse canal foi usado para acionar um led no receptor, indicando que a recepção do sinal e sua decodificação estão sendo feitas corretamente.
Deve-se notar que o sinal OUT -pino 10- do 4001, que irá modular o transmissor, aparece invertido, com o pulso de sincronismo e pulsos de canal a nível 0. Isto se deve ao processo de transmissão e recepção usado, que introduz uma inversão do sinal. Caso se necessite os pulsos a nível lógico 1, basta inverter o sinal OUT usando a última porta NOR do 4001 como inversor. Como dissemos, os pulsos gerados têm duração aproximada de 20 ms para o sincronismo e 5 ms (parte ativa) para a identificação do canal. Dessa forma, com os valores RC usados, o circuito pode identificar de 40 a 10 canais por segundo, considerando o melhor (canal 1) e o pior (canal 8) dos casos (ciclos com duração aproximada de 25 a 100 ms). Isto é suficiente para atender a grande maioria das aplicações. Caso, no entanto, se deseje usar o codificador para aplicações mais críticas, os valores de R1/C1 e R2/C2 poderão ser alterados para se obter uma maior velocidade de operação, ajustando-se, também, as constantes RC do decodificador.
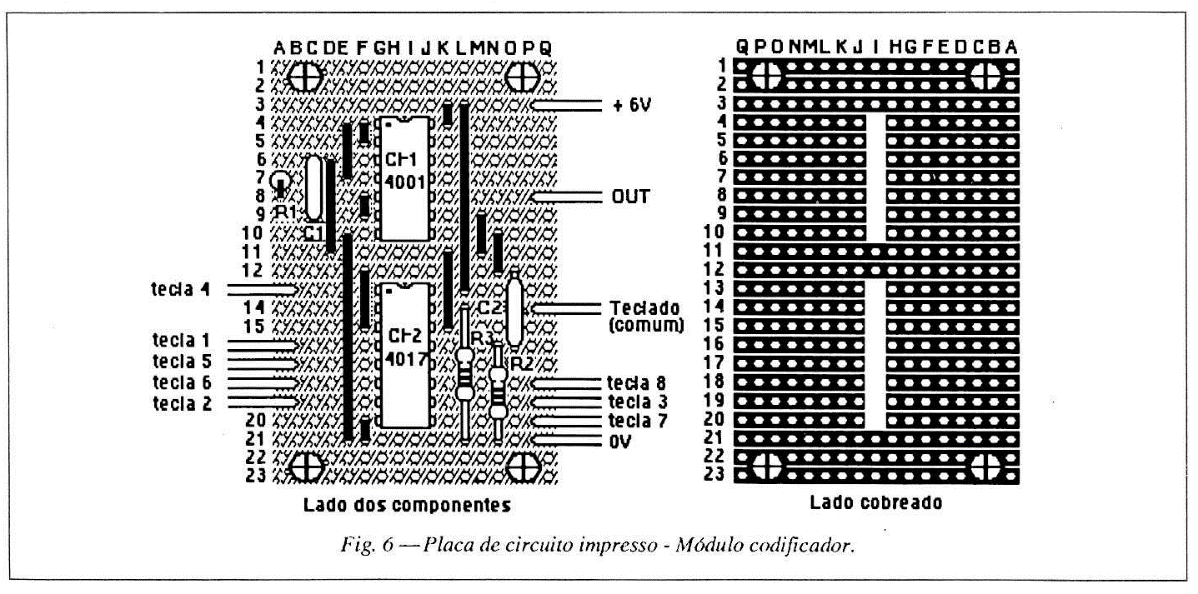
A figura 6 apresenta a montagem do módulo codificador em placa padrão de circuito impresso. Os circuitos integrados devem, preferencialmente, ser instalados em soquetes, para evitar danos durante a soldagem. A alimentação, de 6 Volts, poderá ser feita com 4 pilhas pequenas e será comum a este módulo e ao Módulo Transmissor, descrito a seguir.
O teclado poderá ser montado diretamente na caixa escolhida para conter os dois módulos (Codificador e Transmissor) e deverá ser feito com teclas do tipo normalmente abertas. Os fios a serem ligados no teclado deverá () ter comprimento suficiente para soldagem nas teclas após montagem na caixa. O fio ligado ao pino 15 do 4017 (comum) deverá ser ligado a um dos lados de todas as teclas enquanto aos outros lados deverão ser soldados os fios correspondentes. As teclas deverão ser dispostas de forma a facilitar a identificação da função comandada (para frente, para trás, esquerda, direita, etc.).
MÓDULO TRANSMISSOR:
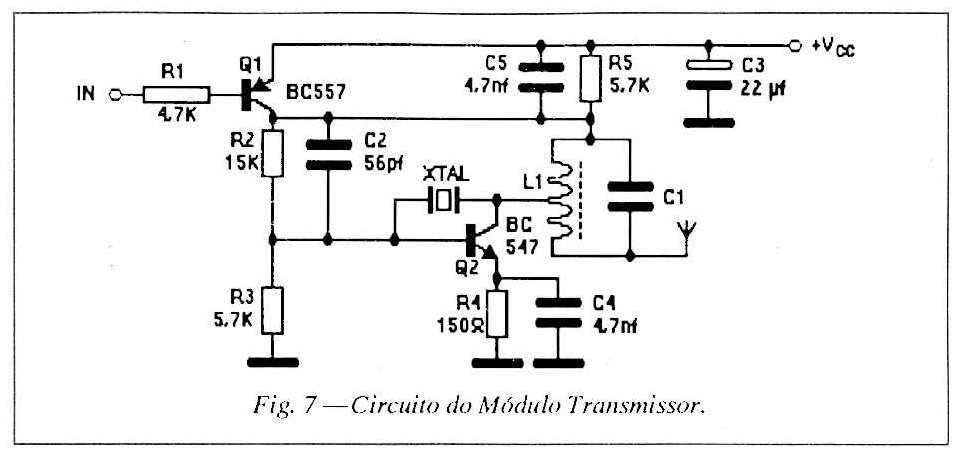
Este módulo, um pequeno transmissor de rádio de baixa potência, com raio de ação de cerca de 50m em campo aberto, pode trabalhar nas faixas de 20 a 40 MHz, dependendo do cristal utilizado. Seu circuito encontra-se na figura 7. A etapa osciladora de alta frequência foi implementada com um transistor BC-547, de uso geral, normalmente usado para áudio frequência, mas que funciona também nas faixas de frequência aqui utilizadas. A oscilação é obtida através do circuito LC formado pela bobina L1 e capacitor C1 e controlada pelo cristal ligado entre a base e o coletor de 02. De acordo com a frequência de operação do cristal utilizado deve-se escolher o valor de Cl. Abaixo são fornecidas 3 possíveis combinações:
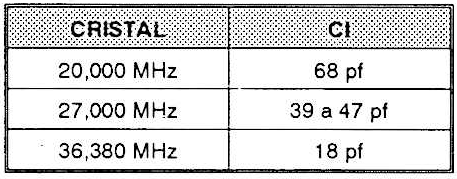
Em nosso caso, optamos por um cristal de 27,000 MHz com um capacitor 'plate' de 39 pf.
A modulação, é obtida pela aplicação do sinal digital (sinal OUT do Módulo Codificador) na base do transistor Q1, via resistor R1. A variação de níveis lógicos 0 e 1 do codificador digital irá colocar o sinal IN ora a 0V, ora a Vcc alterando a alimentação da etapa osciladora e provocando a modulação.
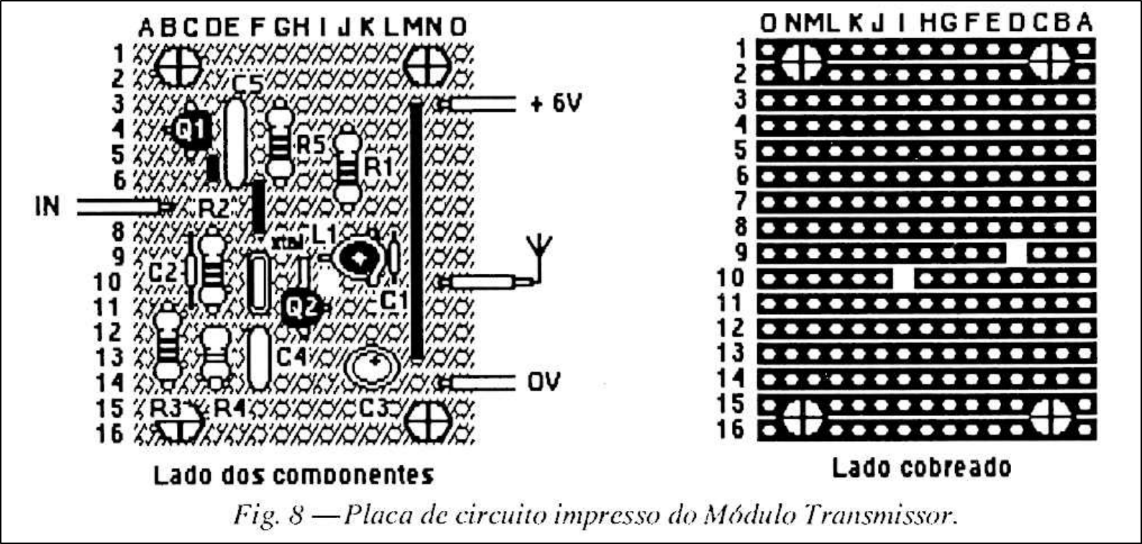
A figura 8 apresenta a montagem do Módulo Transmissor em placa padrão de circuito impresso. A alimentação de 6V é a mesma do Módulo Codificador, podendo-se interligar as linhas +6V e 0V deste módulo com as do codificador. O sinal IN deste módulo deverá ser ligado ao sinal OUT do codificador.
A bobina L1 deverá ser construída-com 13 voltas de fio 20/22 (diâmetro de 0,4 a 0,6 mm), esmaltado, com 0,5 cm de diâmetro interno, sobre um núcleo de ferrite ajustável (com furo no centro) - o núcleo deverá rosquear diretamente no lado interno da bobina. A derivação deverá ser feita entre a 6ª e 7ª espiras. Não deverá haver espaço entre as espiras, devendo-se, inclusive, aplicar cola por fora para mantê-las bem unidas e evitar desvios da frequência de oscilação. A antena poderá ser do tipo telescópica, usada em rádios portáteis.
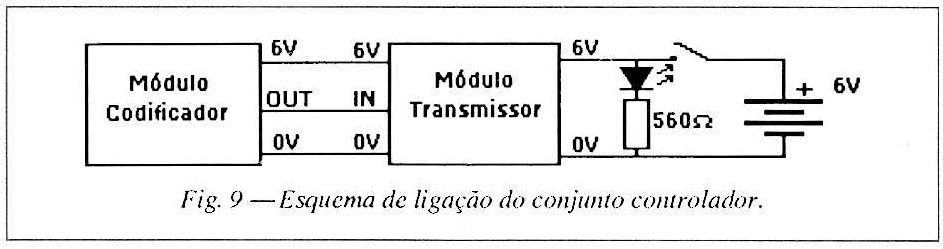
Os módulos Codificador e Transmissor deverão ser interligados, conforme esquematizado na figura 9, e colocados na mesma caixa que irá conter, também, o teclado, a antena, o suporte para as 4 pilhas pequenas e a chave liga/desliga. Opcionalmente, poderá ser colocado um led indicador de alimentação ligada, conforme mostrado na figura 9. O único ajuste do transmissor, feito no núcleo da bobina L1, deverá ser usado para obter o ponto de máxima oscilação da etapa osciladora, controlada pelo cristal. Caso não se disponha de um medidor de intensidade de campo esse ajuste poderá deixar para ser feito após a montagem dos módulos Receptor e Decodificador. O consumo do conjunto, sem led indicador, situa-se em torno de 6 mA e com led em torno de 13 mA.
MÓDULO RECEPTOR
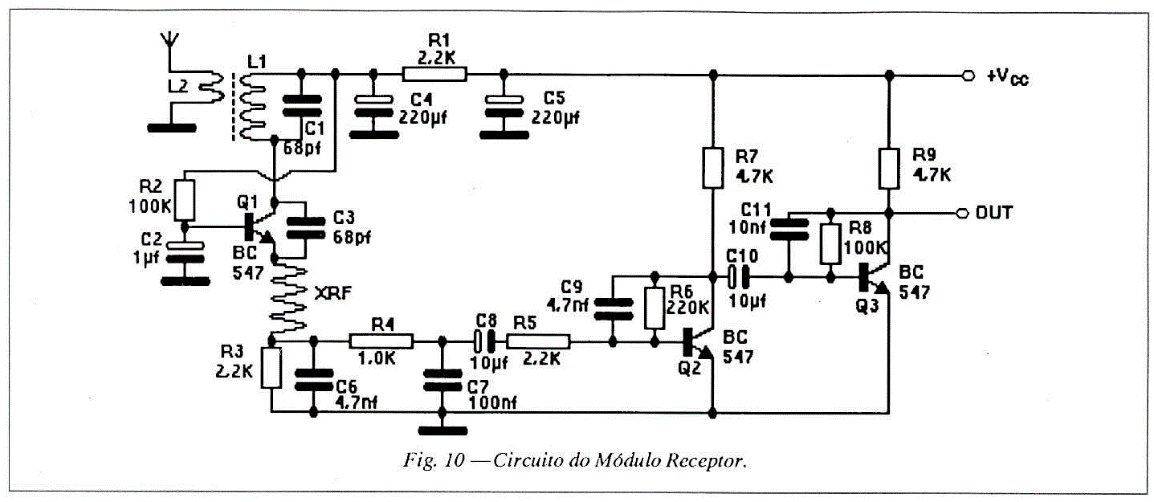
Este módulo, cujo circuito se encontra na figura 10, constitui-se de um pequeno receptor de FM, operando na faixa de 20 a 40 MHz (de acordo com o valor de C1), também baseado no BC547 e de um amplificador de tensão com 2 transistores, que eleva a tensão do sinal recebido aos níveis necessários para correta excitação dos circuitos CMOS do módulo Decodificador. Com os valores mostrados, o circuito opera na frequência de 27 MHz.
As bobinas L1 e L2 e o choque de RF (XRF) devem ser construídas pelo montador, conforme instruções a seguir. A bobina L1 constitui-se de 8 voltas de fio 20/22 (diâmetro de 0,4 a 0,6 mm), esmaltado, com 0,5 cm de diâmetro interno, montada sobre núcleo de ferrite ajustável (com furo no centro) - o núcleo deverá rosquear na parte interna da bobina. Não deverá haver espaçamento entre as espiras. A bobina L2 constitui-se de 2 voltas do mesmo fio, montada na parte superior de L1, sobre o mesmo núcleo. O choque de RF XRF será constituído de 160 voltas de fio 30/32, esmaltado, sobre um resistor de 100K - 1/4 W. Após montado, o choque deverá ter uma resistência à CC de aproximadamente 4 a 6 ohms.
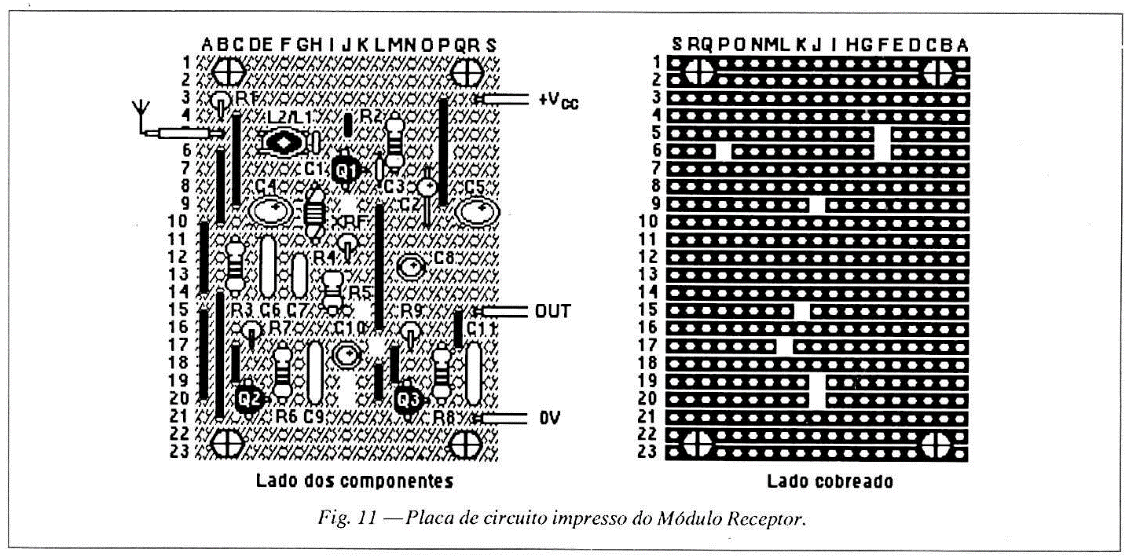
A figura 11 apresenta a montagem do Módulo Receptor em placa padrão de circuito impresso. As linhas de +Vcc e OV serão interligadas às linhas correspondentes do módulo Decodificador. A alimentação de todos os módulos da unidade comandada (Receptor, Decodificador e Potência) é única e será dada por 4 pilhas alcalinas médias. No sinal OUT teremos a reprodução do sinal OUT do Módulo Codificador, com a fase invertida. Esse sinal será entrada para o Módulo Decodificador, descrito a seguir.
MÓDULO DECODIFICADO
Este módulo é o par complementar do codificador apresentado, tendo por função acionar (colocando a nível lógico 1) a saída correspondente à quantidade de pulsos enviados entre 2 pulsos de sincronismo, de acordo com o diagrama mostrado na figura 5, memorizando-a até que seja recebida a próxima sequência de pulsos. Toda decodificação e memorização é feita apenas por 3 Cl's: o contador 4017 e os flip-flops 40174 (6 FF) e 4013 (2 FF), apoiados por 5 portas inversoras do 4069.
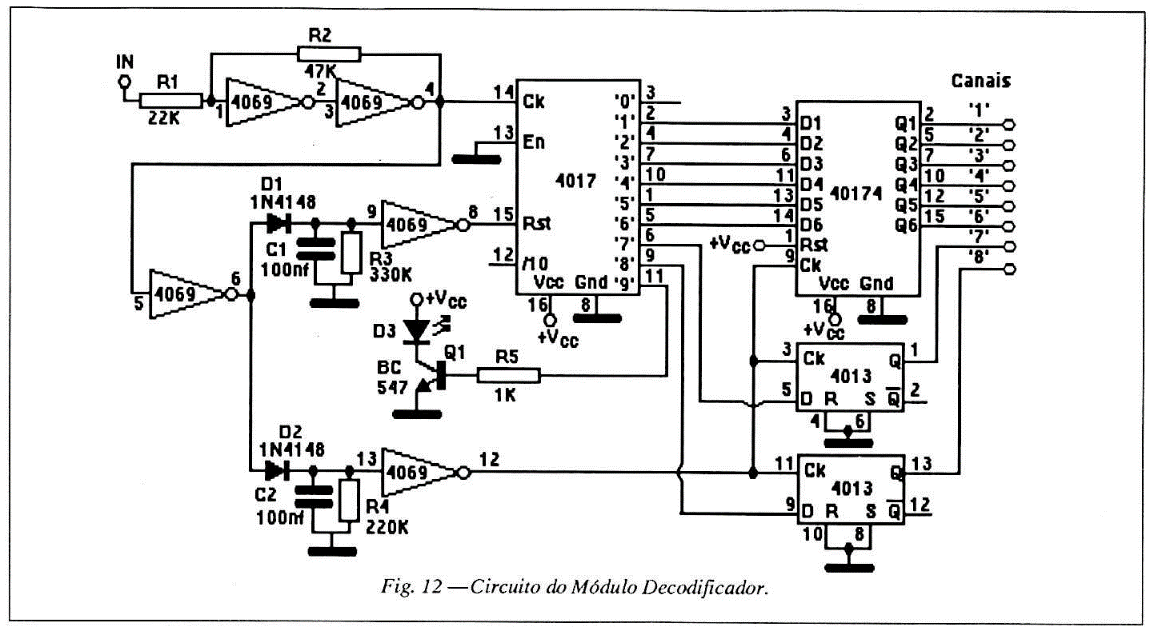
A figura 12 apresenta o circuito completo do Módulo Decodificador. O sinal IN, recebido do Módulo Receptor, passa num primeiro estágio, constituído por R1 e R2 e duas portas inversoras, que funciona como um disparador Schimit-Trigger com imunidade a ruído dada pela fórmula:
R = R2 x Vcc
que, em nosso caso, resulta em 2,8 volts. Os circuitos CMOS normalmente chaveiam quando a voltagem de entrada atinge Vcc/2, ou seja, para Vcc de 6V, chaveiam em 3V. A imunidade de 2,8V cria uma faixa de segurança de 1,4V ao redor de Vcc/2. Assim, a voltagem mínima para que o sinal seja interpretado como “1” será 4,4 (3 + 1,4) volts e para que seja considerado “0” será 1,6 (3 - 1,4) volts; ou seja, variações do sinal de entrada que não ultrapassem 4,4V na subida e 1,6V na descida não irão alterar o estado da saída. Essa imunidade a ruídos é essencial, face à previsão de acionamento de motores CC, que geram grande quantidade de ruído no sinal de entrada, principalmente considerando-se a alimentação única. Essa configuração tem, frente a uma porta Schimit-Trigger normal, a vantagem de permitir que o fator de imunidade seja ajustado alterando-se a relação R1/R2.
Após esse estágio, o sinal de entrada irá servir como clock para o 4017. A cada subida do sinal (transição “0” para “1”), as saídas do 4017 irão ser sequencialmente ativadas. Simultaneamente, o sinal é invertido e usado para ativar dois monoestáveis, responsáveis pela memorização do canal ativado e pelo 'reset' do contador, preparando-o para nova sequência. A saída dos monoestáveis é mantida a nível “0” pelos pulsos de curta duração que identificam o canal. Durante o pulso de sincronismo, no entanto, o tempo de recuperação dos monoestáveis, dado pelas constantes R3/C1 e R4/C2, é atingido e suas saídas retornam a nível “1”. O tempo de recuperação dos monoestáveis é dado pela equação
T = 0,5 RC
que assume os seguintes valores, para R3/C1 (Trst) e para R4/C2 (Tclk):
Trst = 0,5 x 300 x 103 x 100 x 10-9
Trst = 0,016 s = 16 ms
Tclk = 0,5 x 200 x 103 x 100 x 10-9
Tclk = 0,011 s = 11 ms
Lembrando-se que a duração do pulso de sincronismo é de aproximadamente 20 ms, ou seja, tempo suficiente para que os dois monoestáveis retornem ao estado de repouso, verifica-se que o primeiro a atingir esse estado é o que aciona o clock dos flip-flops 40174 e 4013. Mudando de nível “0” para nível “1” esse monoestável faz com que as saídas do 4017 sejam memorizadas no 40174 e 4013. A saída do 4017 que estiver ativada (nível “1”) será a resultante da contagem dos pulsos que antecederam ao pulso de sincronismo; ou seja, o canal que tiver sido acionado pelo Módulo Codificador. Esse estado das saídas do 4017 ficará memorizado até o próximo pulso de sincronismo, quando o sinal clock será novamente ativado.
Entre o acionamento do monoestável R4/C2 e o fim do pulso de sincronismo, o monoestável R3/C1 voltará, também, ao seu estado de repouso (nível "1"), ativando a entrada RST do contador 4017, que ficará resetado até o final do pulso de sincronismo, reiniciando a contagem ao final deste e início da próxima sequência identificadora de canal. Ao se iniciar uma nova sequência de pulsos que irá identificar o canal ativado, os monoestáveis voltam a nível "0", permitindo que o 4017 reinicie a contagem, e assim permanecendo até que um novo pulso de sincronismo seja recebido, reiniciando o processo de memorização e reset.
A saída do 4017 correspondente ao canal 9 está ligada de forma a excitar, através de 01, um led indicador. Este canal, como já dissemos, é ativado pelo codificador sempre que não houver tecla apertada, indicando, assim, a situação de repouso. Dessa forma, esse led irá piscar na frequência aproximada de 10 Hz, indicando, visualmente, que o receptor está recebendo o sinal do transmissor e que esse sinal esta sendo decodificado corretamente. Essa indicação é muito útil para ajuste dos módulos transmissor e receptor e para se detectar se a unidade comandada está recebendo o sinal de comando.
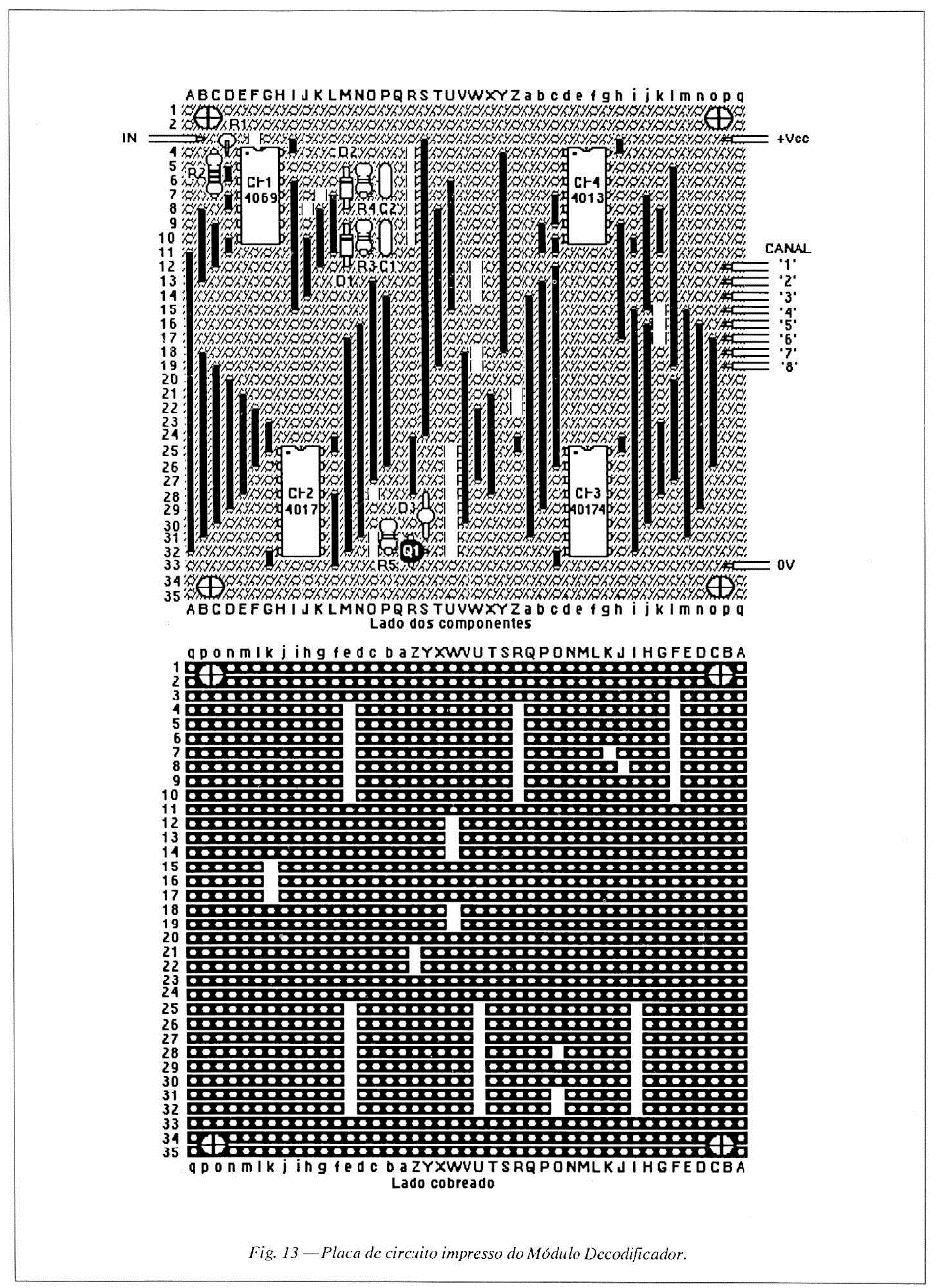
A figura 13 mostra a montagem do Módulo Decodificador em placa padrão de circuito impresso. O sinal IN irá ser interligado ao sinal OUT do receptor, e as saídas "1" a "8" serão usadas para ativar os Módulos de Potência. As linhas +Vcc e 0V deverão ser interligadas com as correspondentes do módulo Receptor.
MÓDULOS DE POTÊNCIA
As saídas do Módulo Decodificador identificam qual dos canais deverá ser ativado. Essa identificação, no entanto, é apenas lógica, pela colocação em nível “1" da linha correspondente. Para ativação efetiva é necessário adicionar-se módulos de potência que, a partir da indicação lógica, gerem a energia necessária ao acionamento dos motores.
O Módulo de Potência que apresentamos permite o acionamento de motores CC, com correntes de até 500 ma, em ambos os sentidos, diretamente a partir de sinais CMOS, TTL ou TTL-LS. Esse módulo é o mesmo utilizado no projeto 'Braço Mecânico para MSX e PC', apresentado na Saber Eletrônica número 215, de dezembro/90.
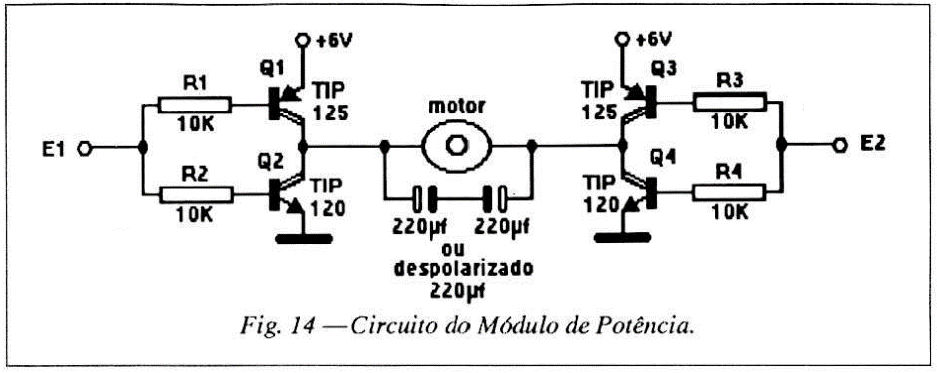
A figura 14 apresenta o circuito do Módulo de Potência, por onde se percebe que o acionamento do motor é feito através de 2 entradas digitais – E1 e E2. Para E1 = E2, não importando se a nível "0" ou a nível "1”, o motor permanece parado, já que para E1 = E2 = nível "0", Q2 e Q4 estarão cortados e para E1 = E2 = nível "1", Q1 e Q3 é que não estarão conduzindo. Para E1 ="0" e E2="1", a corrente circulará por Q1/04, e o motor será acionado num dos sentidos e para E1 ="1" e E2="0" a corrente circulará por Q2/Q3 e o motor será acionado no sentido contrário. Assim sendo, caso se deseje acionar o mesmo motor em ambos os sentidos, deve-se ligar as entradas E1 e E2 a dois canais diferentes, de forma a permitir que cada canal comande o giro num dos sentidos. Caso se deseje acionar o motor num único sentido, deve-se ligar uma das entradas ao canal desejado e a outra a 0V.
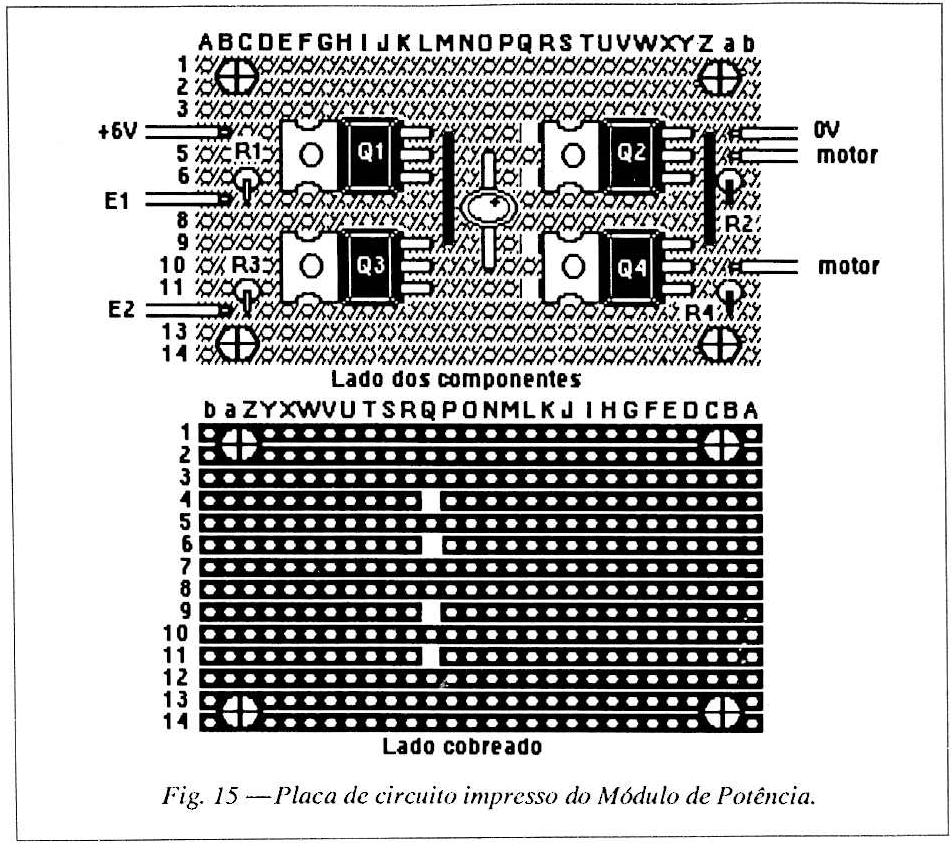
Acionando-se todos os motores em ambos os sentidos se consegue, com 8 canais, controlar no máximo 4 motores (2 canais por motor). Já se todos os motores forem acionados num único sentido, consegue-se acionar 8 motores (1 canal por motor). Em qualquer caso, será necessário um módulo de Potência para cada motor utilizado. A figura 15 apresenta uma sugestão de montagem do Módulo de Potência em placa padrão de circuito impresso.
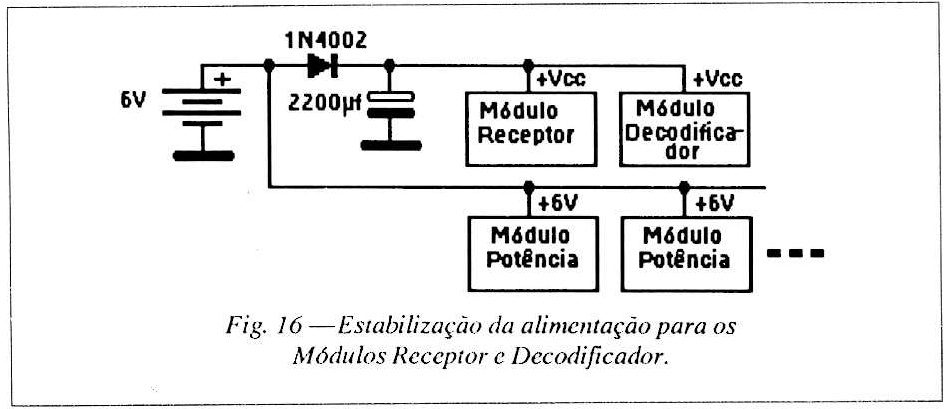
Apesar da alimentação única para todos os módulos da unidade comandada, no caso de se utilizar o controle remoto para acionamento de motores CC será necessário estabilizar-se o fornecimento de energia para os módulos Receptor e Decodificador, a fim de evitar as grandes oscilações provocadas por esses motores no momento em que são acionados. Essa estabilização pode ser conseguida, como mostra a figura 16, pela colocação de um diodo e de um capacitor eletrolítico de alto valor entre o positivo das pilhas e a linha de alimentação dos módulos Receptor e Decodificador (+Vcc). A alimentação dos módulos de Potência será feita, então, diretamente a partir do positivo das pilhas e a dos módulos Receptor e Decodificador após o circuito de estabilização.
MONTAGEM:
Na montagem dos módulos deve-se observar as seguintes recomendações:
• Os circuitos integrados devem, preferencialmente, serem montados em soquetes, para evitar que sejam danificados na soldagem e para facilitar eventuais substituições;
• Solde, em primeiro lugar, os soquetes dos Cl´s, quando houverem, para usá-los como orientação na soldagem da fiação e dos demais componentes;
• Solde, depois, a fiação, os componentes passivos (resistores, capacitores e bobinas) e, por fim, os transistores;
• Encaixe os Cl's nos soquetes somente após ter terminado todas as soldagens;
• As antenas, tanto da unidade de comando quanto da unidade comandada, poderão ser telescópicas, do tipo usado em rádios portáteis;
• No módulo Decodificador, o led D3 poderá ser colocado externamente à placa, de forma a permitir sua visualização após montagem do conjunto na unidade comandada. A ligação através do transistor Q1 permite que mais de um led seja acionado, de forma a permitir a visualização de mais de um lado da unidade. Se for usado um único led e dependendo da luminosidade desejada, poderá ser colocado em série um resistor limitador de corrente.
AJUSTE DA FREQUÊNCIA DE OPERAÇÃO:
O único ajuste necessário à entrada em operação do controle remoto deverá ser feito nos núcleos de ferrite das bobinas que controlam a frequência de operação dos módulos Transmissor e Receptor. Para efetuá-lo, proceda da seguinte forma:
• Caso se disponha de um medidor de intensidade de campo, deve-se utilizá-lo para achar o ponto de máxima intensidade da etapa osciladora do módulo Transmissor, girando-se, lentamente, o núcleo da bobina num sentido e no outro;
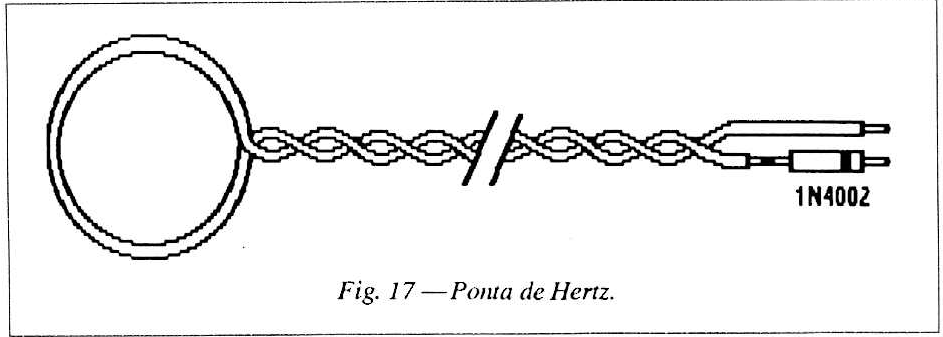
• Caso um medidor de intensidade de campo não seja disponível, pode-se construir uma argola (ou ponta) de Hertz, conforme figura 17. Trata-se de, aproximadamente, 50 a 70 cm de fio 20/22, rígido, com capa plástica, enrolado sobre si mesmo, formando na extremidade uma argola, com 8 a 10 cm de diâmetro. Numa das extremidades deve ser soldado um diodo que irá retificar as ondas de alta frequência captadas pela ponta. Liga-se um medidor de corrente entre o diodo e a outra extremidade da argola. Aproxima-se a argola da etapa osciladora, deixando-a paralela com a antena e gira-se lentamente o núcleo até se notar o aparecimento de corrente de alguns microampères na argola. Isto indicará que a etapa está funcionando. Quanto maior a corrente, para uma mesma posição da argola, maior a intensidade da oscilação.
• Coloque o conjunto Codificador/Transmissor (unidade de comando) a cerca de 1 metro de distância e ligue o conjunto Receptor/Decodificador. Se o funcionamento do Transmissor já tiver sido determinado, gire a bobina do Receptor até que o Ied indicador D3 pisque regularmente. Se o funcionamento do transmissor não tiver sido comprovado, atue nas duas bobinas, girando-as lentamente, num sentido e no outro, até obter o sinal no Ied. Afaste progressivamente a unidade de comando e atue, levemente, nas duas bobinas até conseguir receber corretamente o sinal à maior distância possível. Isto é facilitado pelo fato da unidade de comando ficar transmitindo, constantemente, o acionamento do canal de controle.
• Ligue, nas saídas do decodificador, um ou dois módulos de potência e nestes os motores que se pretende utilizar. Acione, com a unidade de comando, os motores num e noutro sentido, ajustando a bobina do transmissor até conseguir acionar um motor sem interferir com os demais e de forma contínua, sem interrupções. A etapa inicial de ajuste estará concluída.
• Deixe para fazer o ajuste final e definitivo após a montagem completa da unidade comandada, com os módulos e motores já instalados e em seus lugares definitivos. Em condições normais o ajuste inicial ou, no máximo, uma pequena recalibragem do núcleo do transmissor já será suficiente para um funcionamento correto.








