









Este breve artigo nos mostra a aplicação de sensores magnéticos que podem ser utilizados para se conseguir uma resposta direta para o controle de um motor de maneira eficiente a barata.
César Manieri
Nota: Artigo publicado na Revista Saber Eletrônica 456 de 2011.
Abordaremos a realimentação para motores sem escovas de corrente direta (BLDC) com comutação conjunta utilizando-se sensores "Hall", bem como a realimentação usando um encoder de alta resolução para as mais exigentes aplicações em Servo acionamentos.
O princípio de funcionamento e as diferentes formas de trabalho dos motores BLDC serão apresentados. Explicaremos também as tecnologias de realimentação e as várias áreas de aplicação deste tipo de motor e sensores. Na sequência, os sensores de efeito Hall para detecção de posição de rotor BLDC e seu princípio de funcionamento, tipo de comutação e características de desempenho principais.
Em aplicações que requerem uma realimentação com uma maior precisão, tais como motores síncronos de ímã permanente (PMSM) usados em sistemas de servo, os encoders são amplamente empregados. Mas uma boa escolha para este tipo de aplicação é o sensor integrado de alta velocidade baseado no princípio magneto-resistivo gigante (IGMR). Explicaremos e detalharemos como é seu princípio de funcionamento, bem como suas vantagens sob os encoders ópticos.
Por fim, este artigo mostrará ao leitor as vantagens destes sensores para aplicações de controle do motor sob o ponto de vista técnico e quais as vantagens de custo e qualidade tão importantes em qualquer sistema aos quais eles serão aplicados.
Brushless DC Motors
Este item aborda o princípio de funcionamento e as vantagens de tipos de motor DC sem escovas, e depois explica em mais detalhes a estrutura de realimentação e as aplicações de motores BLDC. Considere também consultar artigos que mostram a aplicação da eletrônica para o controle do motor baseados em sensores e sensorless.
Princípio de Funcionamento
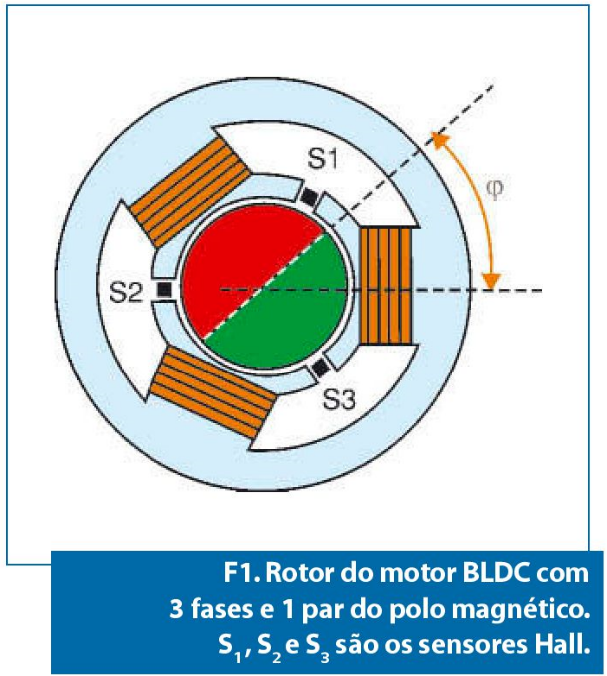
A figura 1 mostra um motor BLDC típico. Os motores com escovas, como o próprio nome diz, usam as mesmas escovas como um comutador mecânico e, portanto, oferece um contato mecânico, a fim de direcionar o fluxo de corrente através dos enrolamentos do rotor. Já no caso dos motores BLDC não existe esse contato elétrico entre estator e rotor.
De fato, enquanto para a maioria dos motores DC com escovas os enrolamentos da bobina são fixados na parte do rotor e os ímãs permanentes no estator, no BLDC este processo é invertido. O mesmo tem um rotor formado por ímãs permanentes leves e os enrolamentos estão fixos no estator.
O motor de ímã permanente possui uma característica interessante que é a menor inércia do rotor e, consequentemente, maior eficiência em comparação com os seus homólogos com escovas. A maior desvantagem dos motores com escovas decorre da natureza mecânica do chaveamento da comutação. Uma vez que uma corrente considerável está sendo conduzida através das escovas, faíscas podem se formar e conduzir alta frequência e emissões eletromagnéticas, afetando negativamente outros equipamentos eletrônicos.
Outro fator é a sobrecarga que pode deteriorar precocemente essas escovas. As escovas de contato podem desgastar-se, elevando as taxas de insucesso e tornando o custo de manutenção mais elevado. Este fenômeno é totalmente nulo em motores BLDC, evitando contatos elétricos entre o estator e o rotor. As vantagens dos motores BLDC também têm um preço, que é principalmente o de maior complexidade e um maior custo na eletrônica e a necessidade de sensores de realimentação.
O motor na figura 1 usa três fases e um ímã de rotor com apenas um polo, que é a forma mais simples possível de um trifásico BLDC. Aumentar a quantidade de polos magnéticos ajuda a melhorar a suavidade do motor, que é uma característica especialmente encontrada em motores deste tipo.
A - Aplicações e Tendências
Devido à sua alta eficiência e confiabilidade, motores BLDC podem ser encontrados em uma variedade de aplicações em todos os tipos de segmentos de produtos e classes de desempenho.
Motores de baixa potência podem ser encontrados em dispositivos de consumo como, por exemplo, câmeras ou computadores, ventiladores de fontes de alimentação, unidades de disco rígido ou DVD players. Em aplicações automotivas, a melhoria da eficiência energética e robustez dos motores Brushless tornam a escolha ideal para um número crescente de aplicações como, por exemplo, motores para sistemas de ventilação de ar condicionado. As bicicletas elétricas são, ainda, outra aplicação onde motores brushless são encontrados.
Eficiência, segurança e confiabilidade servem como forças motrizes e reforçam a aplicação de motores sem escovas, os quais também se beneficiam de reduções de custo devido ao contínuo desenvolvimento da eletrônica de controle. Notem que a comutação dos motores mais sofisticados como os usados em sistemas de direção elétrica veicular (EPS) e sistemas industriais de automação comumente empregam os sofisticados sistemas de comutação senoidal.
Nesses casos, estamos nos referindo aos motores síncronos de ímã permanente (PMSM), abordaremos a realimentação deste tipo de motor em detalhes no item 4.
B - Princípios de realimentação do BLDC
Basicamente, qualquer princípio de detecção que forneça informações sobre a posição do rotor pode ser empregada para, eletronicamente, controlar a alimentação das bobinas do atuador. Os princípios essenciais são: três fases de comutação de efeito Hall, força contra eletromotriz e encoders.
C - Efeito Hall Trifásico
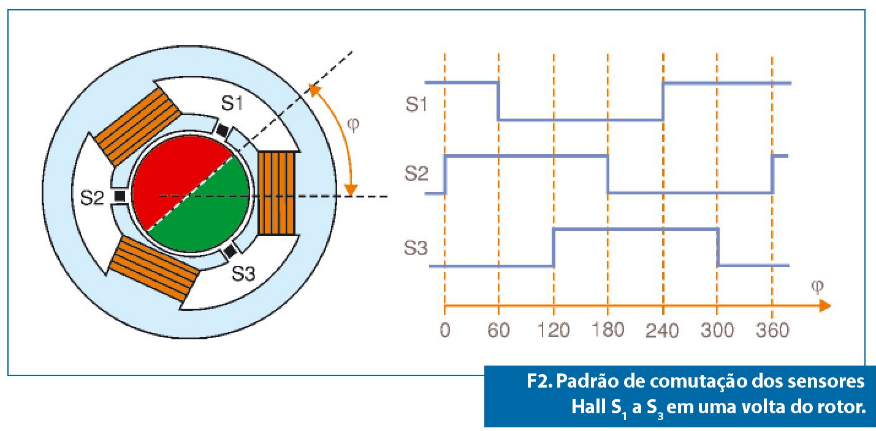
O sistema de realimentação mais amplamente utilizado para a comutação BLDC são os sensores de efeito Hall como exemplificada na figura 1.0 padrão de sinal típico obtido a partir dos interruptores Hall S, a S3 em uma revolução do rotor pode ser visto na figura 2. Os sensores podem ser usados diretamente para a comutação do bloco do motor BLDC. Mais à frente, explicaremos este tipo de comutação com mais detalhes.
D - Força Contraeletromotriz
Um outro tipo de motor, o BLDC, é conhecido como sensorless e usa a força contraeletromotriz (back EMF) induzida nas bobinas desenergizadas a fim de obter informações sobre a posição do rotor. Este tipo de atuação tem a óbvia vantagem de não precisar de qualquer sensor adicional e, portanto, contribui para um conjunto de motor de baixo custo. Por outro lado, a precisão do posicionamento resultante não coincide com a precisão do sensor que é baseado nos princípios da realimentação e algumas dificuldades adicionais surgem no startup uma vez que o EMF não é, induzido à velocidade zero.
Os circuitos empregados para o funcionamento precisam levar isso em conta, o que pode ser feito com algoritmos de controle dirigidos e executados em microcontroladores dedicados a estes propósitos. O leitor interessado pode acessar o link abaixo para mais detalhes: www.infineon.com/dgdl/AP0805910_Sensorless_FOC.pdf?folderId=db3a3043134aa0ee01134dc f16670067&fileId=db3a3043134dde6001 134e2c3cff002f
Realimentação usando sensor Hall
Agora veremos um sistema de realimentação dominante com base em interruptores de efeito Hall, o princípio de funcionamento geral e os requisitos do sensor e apresentaremos os interruptores de efeito Hall para aplicações em motores BLDC. A figura 1 mostra o tipo mais fácil de implementação de um interruptor de efeito Hall. Os três sensores Hall são separados por 120° e ângulos de fase gatilhados pelo ímã do rotor. Eles produzem um padrão de comutação, descrito na figura 2, com um novo estado digital a cada 60°.
Portanto, é possível saber a posição do rotor com uma resolução de 60°, e se os sensores Hall são colocados na posição correta, as transições do sinal podem corresponder exatamente aos pontos ideais de comutação da energização da bobina.
Dentro deste modelo, sinais de acionamento, sejam eles constantes ou modulados pela largura de pulsos(PWM), poderão ser usados para alimentar as bobinas e acionar o motor. Em muitos motores DC sem escovas, os sensores Hall são usados diretamente para sentir o campo magnético dos ímãs do rotor como no exemplo da figura 1.
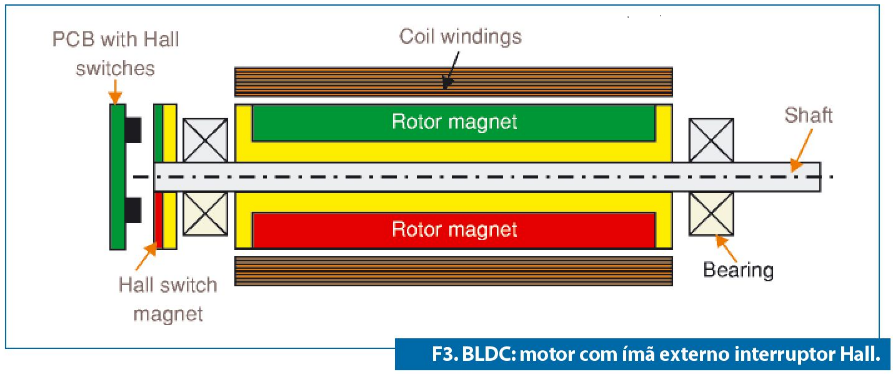
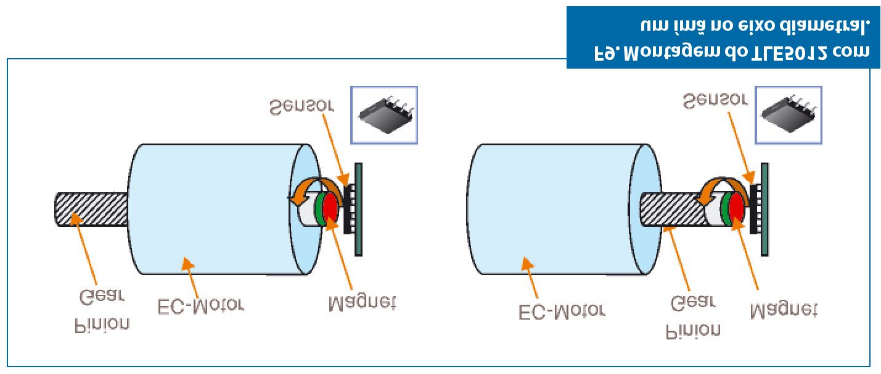
Como consequência, os sensores são montados no interior do motor e são expostos a altas temperaturas e vibrações e se por acaso houver uma falta de vedação, gases e líquidos poderão afetar as peças. Além disso, a montagem de novos sensores e, especialmente, a substituição destas peças é bastante delicada e cara. Alguns motores, portanto, possuem um anel magnético adicional montado sobre o eixo, assim os sensores Hall são chaveados por este anel magnético. Isso permite que os sensores Hall sejam montados longe de partes que aquecem. A figura 3 ilustra essa implementação.
Os benefícios desta montagem são acesso à temperatura mais baixa, instalação mais fácil e flexibilidade de design. Neste caso, é necessário a implementação de uma roda de código magnético adicional. Para este tipo de projeto, sensores angulares usados no modo de chaveamento Hall são especialmente atraentes, como mostrado no item D.
a - Tipos de Sensores
O interruptores de efeito Hall alternam entre dois estados lógicos e exibem alguma histerese de comutação entre estes dois pontos. De um modo geral, distingue-se entre dois principais tipos de dispositivos: interruptores unipolares e travas bipolares. Os interruptores Omnipolar e os interruptores bipolares não estão sendo considerados aqui. Caso o leitor queira mais informações, acesse:
b - Interruptores unipolar (Switches)
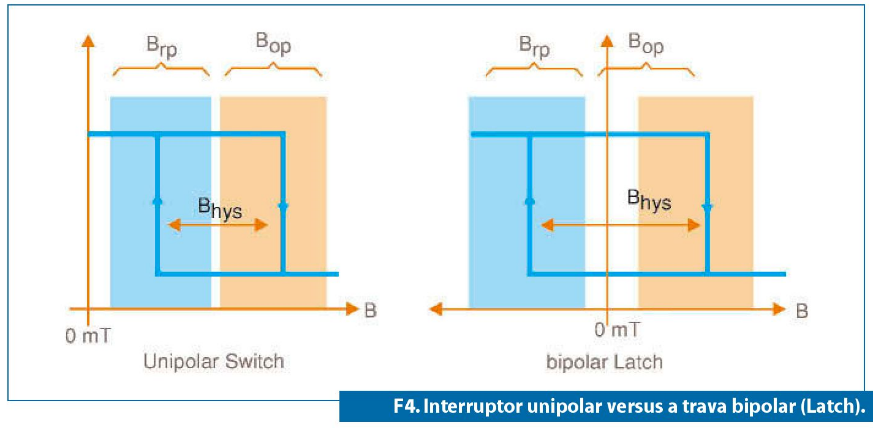
A figura 4 exibe o princípio de funcionamento dos interruptores unipolares. O dispositivo de saída liga quando o campo magnético aplicado passa para o ponto de operação Bop. Se o campo magnético for desligado, o dispositivo mudará de volta para a situação de desligado. Isso ocorre mesmo antes do estado do campo magnético chegar a zero na faixa Brp. O efeito de histerese Bhys está presente para evitar uma transição muito rápida nos eventos de comutação entre os dois estados.
c - Travas Bipolares (Latches)
Da mesma forma que um interruptor unipolar, as travas bipolares também ligam depois de passar o Bop. No entanto, após a retirada do campo magnético, a trava bipolar mantém seu estado mesmo em campo zero. Apenas uma vez o campo de polaridade inversa passa por Brp e faz com que o dispositivo retorne ao seu estado desligado como mostrado na figura 4. Estes dispositivos, portanto, travam efetivamente seu estado como o nome sugere.
d - Requisitos das chaves de efeito Hall
A seguir, vamos observar os requisitos específicos dos interruptores de efeito Hall usados para comutação do motor BLDC.
Unipolar versus bipolar: A tarefa do sensor é detectar a posição do rotor com precisão. Idealmente, os sensores entregam um sinal de comutação exatamente a cada 60 ° de posição do rotor do motor, independentemente da velocidade e torque aplicados. Cada sensor individualmente muda sua saída a cada 180 °.
A figura 5 mostra como um interruptor convencional unipolar e duas travas bipolares diferentes se comportariam. Pode ser visto que o interruptor unipolar levaria a um ciclo de trabalho desequilibrado, enquanto a trava bipolar tem um ciclo de exatamente 50% quando Bop e Brp têm o mesmo valor absoluto.
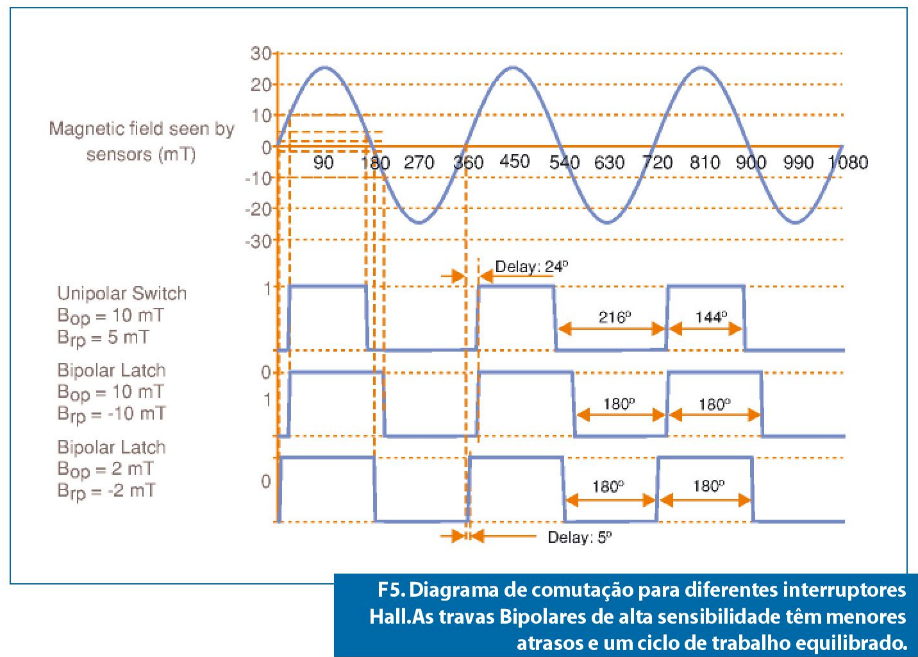
Uma maior sensibilidade levará a um menor atraso, sendo por isso que os pontos de comutação perto 0mT são os mais preferidos. As travas Bipolares de alta sensibilidade são, portanto, a melhor opção para esta aplicação.
Precisão do Ponto de Comutação: Devido ao amplo e complexo processo na fabricação de semicondutores, infelizmente não é possível criar sensores idênticos. Cada um é individual, e verifica-se que o ponto de comutação magnética é um dos parâmetros que são consideravelmente afetados pela amplitude do processo.
Além disso, os efeitos ambientais, tais como estresse mecânico resultante devido à moldagem ou umidade podem levar a desvios e mudar pontos ao longo da vida útil do componente. Para minimizar estes efeitos, os sensores efeito Hall da família TLE49x6 empregam o princípio chopping, no qual um engenhoso método é aplicado. Este método cancela o "offset" da sonda Hall e do estágio amplificador de entrada.
Esta tecnologia permite especificar os pontos de comutação em uma janela magnética muito estreita. A alta resistência contra estresses mecânicos é outro grande benefício da família TLE49x6. A figura 6 ilustra como duas travas bipolares com diferentes pontos de comutação são comparadas. Pode-se notar que, no pior dos casos, o ciclo de trabalho pode ser muito desequilibrado se Bop e Brp estiverem em uma das extremidades da faixa do ponto de comutação especificado.
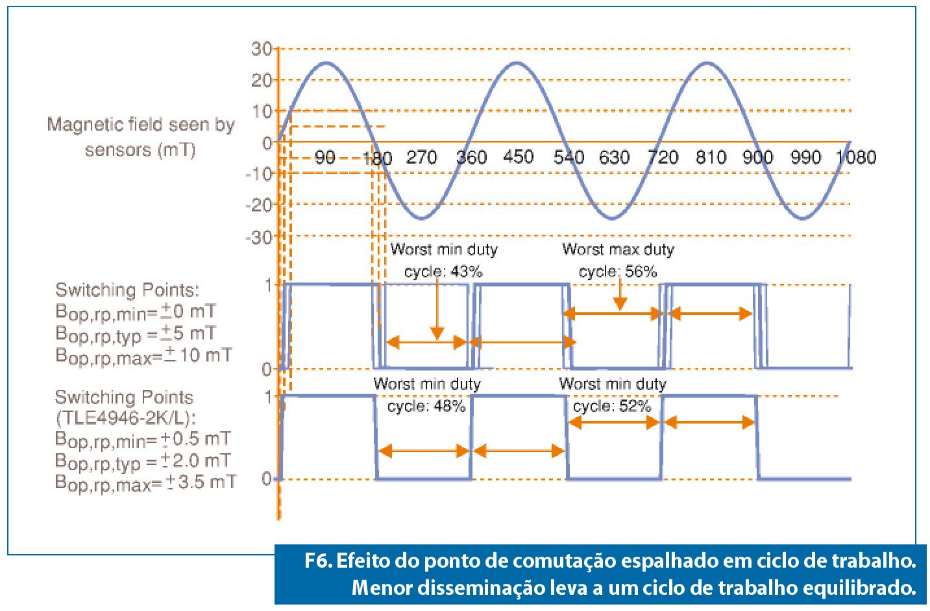
No caso do TLE4946-2K e TLE4946-2L, que empregam o princípio chopping, a disseminação dos pontos de comutação é muito mais difícil e o efeito sobre o ciclo de trabalho é, portanto, muito pequeno, levando a uma atuação equilibrada do motor durante uma rotação completa.
Atraso: Uma vez que o campo magnético cruza o ponto zero, a comutação deve ser imediata e não pode ser adiada por algum processamento interno no sensor. Os sensores Hall são baseados em uma tecnologia que permite um caminho rápido do sinal e isso gera um atraso bem pequeno entre a entrada e a saída.
Jitter: A repetitividade de um padrão de comutação correto é outro critério importante em aplicações de comutação do motor. O parâmetro jitter identifica quanto os pontos de comutação podem variar durante uma operação regular.
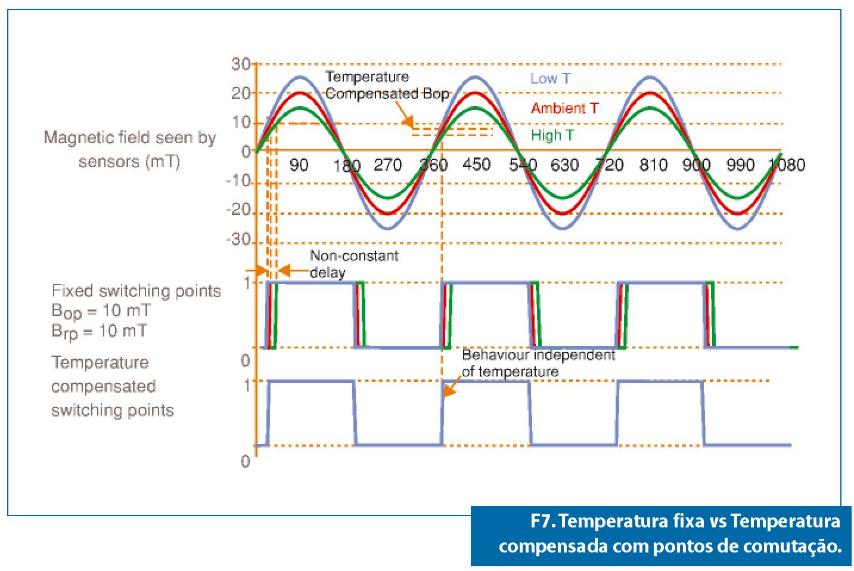
Estabilidade de temperatura: Os ímãs permanentes utilizados em motores PMSM e BLDC, infelizmente, perdem alguma da sua força se a temperatura é aumentada (que também é reversível). A fim de manter uma precisa comutação do sensor, com a mesma posição física, o sensor tem que seguir o comportamento da temperatura do ímã para compensar este efeito. Portanto, sentindo a temperatura ambiente, o sensor de efeito Hall da família TLE49x6 controla a compensação de temperatura para que o mesmo tenha um desempenho repetitivo estável em toda a faixa de temperatura durante sua operação.
A figura 7 apresenta como qualitativamente as variações de temperatura levam a um comportamento diferente para sensores com pontos fixos de comutação e de compensação de temperatura, enquanto ajuda a manter o mesmo comportamento independente da temperatura apresentada.
e - Chaves de efeito Hall para comutação do Motor
Com base nos indicadores de desempenho descritos acima, a indústria de semicondutores tem desenvolvido interruptores de efeito Hall dedicados a aplicações de controle de motor, disponível em dois pacotes, por exemplo: O TLE4946-2K em um encapsulamento SC59 SMD, bem como a TLE4946-2L com encapsulamento PG-SSO-3-2 (conforme a figura 8).

As peças possuem as seguintes características:
• Alta sensibilidade (pontos de comutação perto de zero, Bop 2mt e Brp-2mt típico);
• Pequenas propagações do ponto de comutação (Bop entre 0,5 e 3,5 mT, Brp entre -3,5 e-0,5 mT);
• Compensação de temperatura Excelente (set to-350 ppm / °C típico);
• Tempo de atraso pequeno (tipicamente 13 µs);
• Baixo jitter (tipicamente 1 µs).
Além disso, todos os requisitos básicos para os sensores que trabalham em ambientes agressivos são preenchidos por estes componentes, incluindo:
• Ampla faixa de operação da tensão de alimentação (2,7 V a 18 V);
• Alta faixa de máxima tensão de alimentação, incluindo a proteção contra inversão de polaridade (-18 V a 26 V);
• Faixa de alta temperatura (-40 a 150 °C, de faixa de operação, a classificação máxima de até 195 °C por curto período de tempo);
• Alta imunidade contra ESD (> 4 kV).
Todas essas características tornam o TLE4946-2L e TLE4946-2K ideais para aplicações de comutação do motor. Para mais detalhes sobre esta parte, consulte: www.infineon.com/sensor
f - Sensores Angulares no modo Hall Switch
Para aplicações onde um ímã externo tem seu uso recomendado e viável, como na figura 3, as empresas desenvolveram uma solução mais fácil que não necessita de três, mas de apenas um sensor para criar os padrões de comutação dos interruptores de efeito Hall: o sensor angular TLE5012.
Este sensor é baseado em projeto e tecnologia vencedora do Prêmio Nobel, chamado de efeito gigante magneto-resistiva (GMR), que a empresa Infineon Technologies, por exemplo, tem integrado com sucesso no processamento de silício padrão em sua tecnologia IGMR. A figura 9 traz uma possível implementação do TLE5012 comum simples ímã cilíndrico montado no eixo do motor.
O TLE5012 pode ser usado para criar padrões de comutação para a condução de rotores com 2, 3, 4, 6, 7, 8, 12 e 16 polos. Devido a um algoritmo de autocalibração, que atinge uma precisão angular (mecânica) melhor do que 1° obtém-se mais temperatura e tempo de vida. Isto significa que os padrões de comutação do TLE5012 são tipicamente bem mais precisos. Consegue-se maior precisão do que aquela alcançada com os sensores Hall melhores.
Para alguns motores, que exigem suavidade de torque ainda maior, como a comutação do bloco que é empregada na maioria dos motores brushless DC ainda não é suficiente, usa-se o design de enrolamentos especiais, bem como algoritmos de acionamento adaptados garantem um melhor acionamento do motor de forma síncrona. Estes motores síncronos de ímã permanente (PMSM) normalmente requerem maior avaliação de precisão. Uma possibilidade é usar o TLE5012 no modo Hall de comutação, como descrito acima, uma outra é usar o modo de realimentação por encoder que será descrito no próximo item.
Realimentação por Encoder
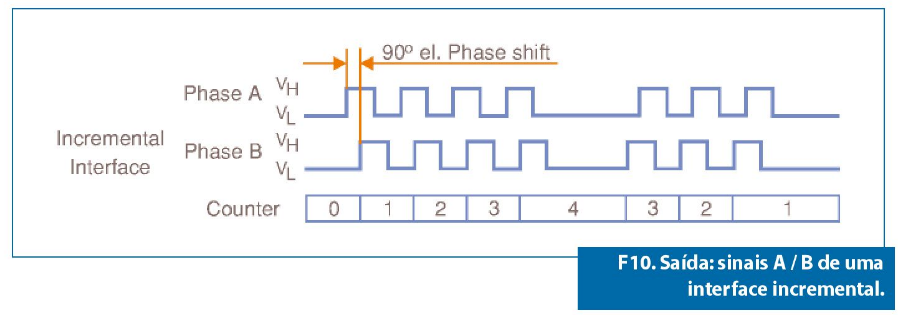
Muitos sistemas de motores para aplicações de controle de servo requerem um sinal de realimentação mais preciso para trabalhar. Muitos tipos de motores podem ser considerados para estas aplicações, e os motores síncronos de ímã permanente (PMSM) são uma escolha possível, muitas vezes usados com gabarito de alta precisão. Os encoders não entregam apenas dois eventos de comutação por volta do motor como os interruptores Hall, mas podem ter uma resolução angular muito maior. Servomotores são operados com malhas de controle fechado, os sinais de saída (posição, torque, velocidade) são percebidos e processados para derivar as entradas do motor da melhor forma possível. O feedback é geralmente obtido por resolvers ou por encoders incrementais. Equipamentos industriais, muitas vezes usam esse tipo de servomotores nos braços robóticos, ou em máquinas ferramental de produção, são mais precisos e são encontrados também na indústria automobilística moderna, por exemplo, nos sistemas EPS (Electronic Power Steering). A figura 10 apresenta um sinal de saída típico A, B e produzido por um encoder incremental, caso o motor seja ligado pela primeira vez para a frente, depois para trás. A unidade de controle pode, então, adaptar um contador interno e registrar cada vez que uma borda de subida acontece na fase B. A direção pode ser detectada com base se a fase A precede ou não a B. Um sinal adicional Z é frequentemente disponível para indicar a referência de posição.
A - Encoders ópticos
Encoders ópticos são o tipo principal de encoder em uso hoje. Sua principal vantagem é não ter contato e isso permite ao sistema não se desgastar. Encoders ópticos estão disponíveis com resolução relativamente alta e oferece boa precisão absoluta. Infelizmente, encoders ópticos ainda são relativamente caros, e o sistema óptico é propenso a ser perturbado por poeira ou umidade. Além disso, é difícil e caro encontrar encoders ópticos para pequenas dimensões.
B - Encoders Magnéticos
Estes sistemas estão disponíveis por algum tempo devido aos avanços na integração da tecnologia de sensor magnético, tornando-os uma verdadeira alternativa para sistemas de realimentação angular. Existem sistemas disponíveis usando o efeito Hall, a magnetorresistência anisotrópica (AMR) ou o efeito GMR. Infineon está usando sua tecnologia para oferecer um sensor encoder IGMR versátil: o TLE5012. O sistema magnético tem muitas vantagens sobre o sistema óptico:
• O custo baixo do sistema;
• Construir em espaços reduzidos;
• Selagem possível;
• Gama de temperaturas mais altas.
Algumas das desvantagens de codificadores magnéticos até agora incluem a menor precisão angular e resolução, falta de protocolos de interface, bem como sua baixa velocidade. Estas questões podem agora ser resolvidas no TLE5012:
• Alta velocidade: O TLE5012 é construído em uma tecnologia de alta velocidade, permitindo uma taxa de atualização de até 43 ias;
• Alta precisão: Os sensor com tecnologia IGMR sente a direção do campo magnético, e não a sua força. Isso significa que a precisão é independente da temperatura e da vida útil do sistema. Para melhorar ainda mais a precisão, o TLE5012 usa um algoritmo de autocalibração para obter precisão de+/-1°;
• Alta resolução: O TLE5012 trabalha com até 16 bits de resolução interna e a saída tem uma resolução 12bit em sua interface incremental;
• Interfaces: Além de oferecer a interface e o modo incremental do sensor Hall já descrito anteriormente, o TLE5012 também oferece uma interface PWM, bem como uma interface SPI para mais versatilidade para o usuário.
Com as interfaces PWM e SPI, é possível usar o sensor como um sensor de ângulo absoluto (resolver) no qual o sinal de ângulo absoluto está disponível imediatamente após a inicialização, evitando a necessidade de referenciar. Essas vantagens tornam o TLE5012 uma excelente escolha para a realimentação de posição sem contato em sistemas de alto desempenho para aplicações de controle de motor.
Conclusão
Neste artigo, os princípios de realimentação da posição do sensor para diferentes tipos de motores foram descritos. Foi mostrado que a família de sensores Hall TLE49x6 é bem adequada para ser usada para a comutação do motor em aplicações BLDC, especialmente os TLE4946-2K e o TLE4946-2L que foram projetados para atingir o melhor desempenho possível dos motores BLDC.
Muitos sistemas de controle de motores necessitam de uma realimentação de posição muito precisa para aplicações de servo. No passado, encoders ópticos foram a principal escolha para esta finalidade. Avanços na tecnologia IGMR agora tornam possível alcançar a alta velocidade, resolução e precisão com o TLE5012, que juntamente com sua robustez e versatilidade fazem do produto uma excelente escolha para a próxima geração de sistemas de realimentação de posição.








