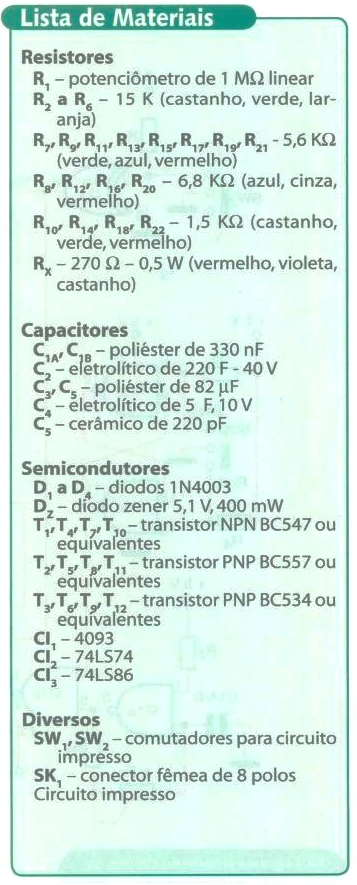
A eletrônica e a mecânica são disciplinas relacionadas desde sempre com todos os setores da automatização, e a difusão dos microcontroladores acentuou esta colaboração.
Um componente que, embora não seja uma grande novidade como conceito, conseguiu obter grandes vantagens das tecnologias digitais, ou seja, o "motor de passo", também conhecido como stepping (ou stepper) motor.
Ao contrário de um motor normal, que tem um movimento contínuo, este componente move-se com saltos curtos (os "passos"), cada um dos quais deverá ser controlado claramente.
Passos contados
Para cada passo do motor corresponde-lhe um ângulo de rotação exato: se para uma rotação completa (360°) são necessários 200 passos, cada um deles implica uma rotação de 1,8°. Isto significa que a posição do eixo de um motor de passo pode ser controlada com exatidão; além disso, pode-se mantê-lo quieto no ponto desejado, devido à corrente de controle.
Com uma série interrompida de passos obtém-se, no entanto, uma rotação contínua, cuja velocidade depende do ritmo ao qual são aplicados os pulsos elétricos às bobinas do próprio motor.
O controlador
Pode-se obter cada passo aplicando uma exata sequência de pulsos às bobinas do motor, ou "tempos", que normalmente são dois ou mesmo quatro (o 49 tempo não requer inversões de polaridade).
Visto que existem integrados especializados para a geração dos pulsos e o controle das bobinas (controlador), estes não são essenciais.
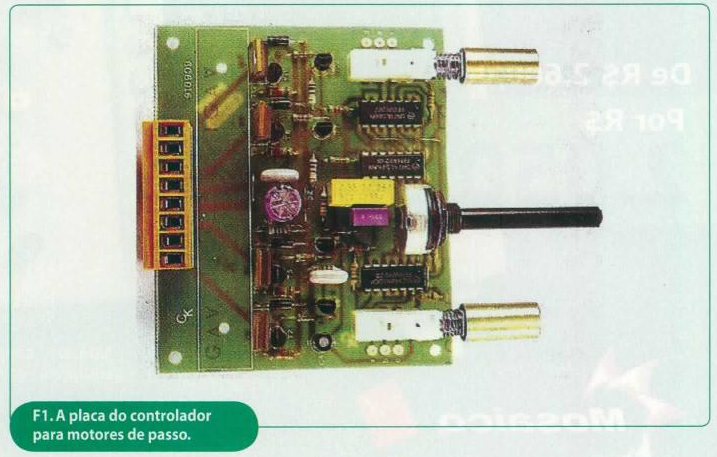
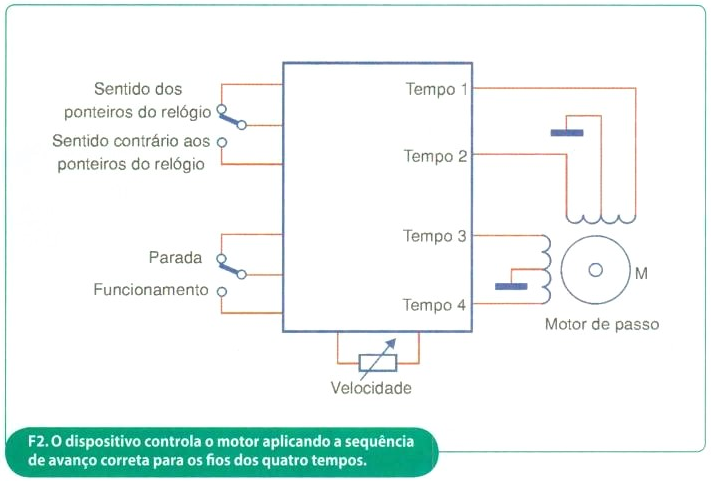
O nosso projeto mostra como se pode realizar um controlador, capaz de regular a velocidade e o sentido de um motor de 4 tempos, utilizando componentes normais e integrados lógicos standards. Veja na figura 1 a placa montada do controlador e na figura 2 o esquema de controle simplificado.
Montagem do circuito
Os objetos que vão ser colocados sobre a placa do circuito impresso, já ilustrados na figura 3, não são muitos e apresentam-se adequadamente separados, mantendo um aspecto ordenado e compacto no seu conjunto.
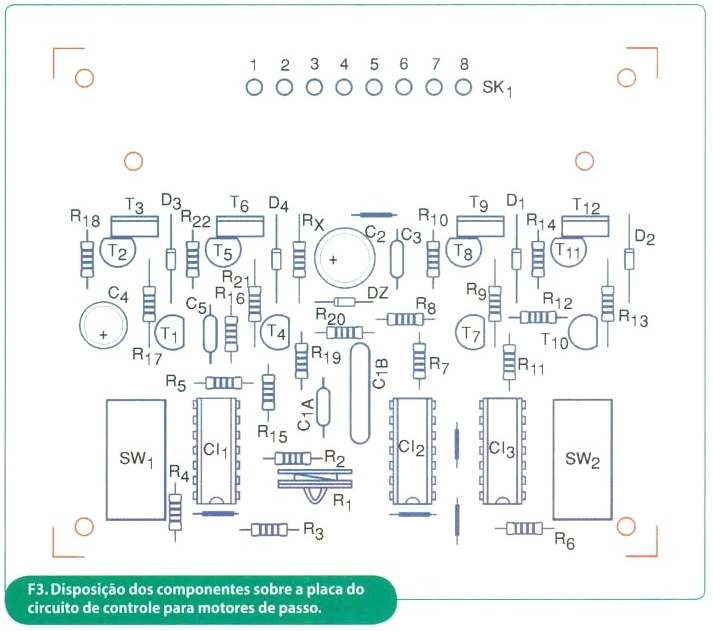
Em primeiro lugar, devem ser montadas as cinco pontes do fio de cobre sem proteção (ou seja, sem isolador), depois continua-se com as resistências e os restantes componentes, por ordem crescente da altura.
Como sempre, deve-se prestar a maior atenção à correta orientação dos componentes polarizados: díodos (incluído o Zener TZ), transistores e circuitos integrados, já soldados ou no alvéolo.
Pormenores da Montagem
Os capacitores de poliéster C1A e C1B são considerados como tendo uma capacidade total de 0,66 µF, de modo que é indiferente se ambos são de 0,33 µF, ou mesmo um de 0,27 µF e o outro de 0,39 µF.
Os dois comutadores e o potenciômetro estão dispostos de modo que se facilite a montagem no painel da placa, mas no fim podem ser separados, desde que os fios de ligação sejam curtos. Para as ligações com o motor utiliza-se um conector de inserção rápida ou mesmo uma barra (SK1); entre esta e os transistores (T3, T6, T9 e T12) está previsto o espaço para um possível dissipador.
Ligações Cabeadas
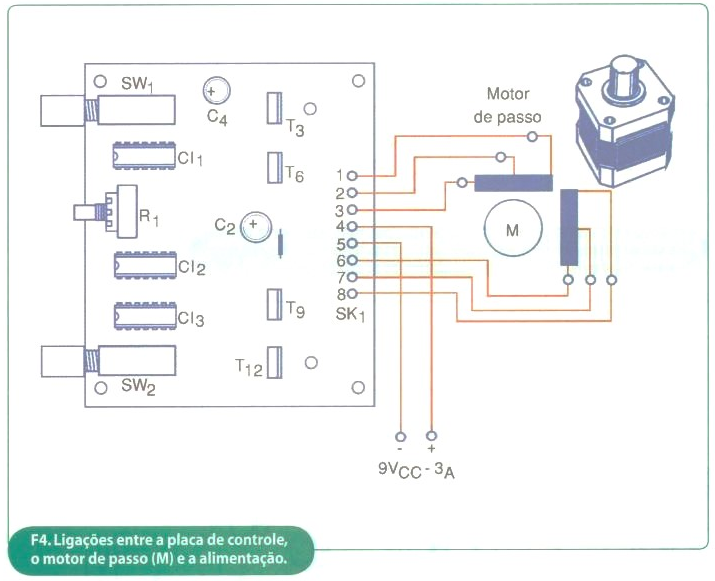
A alimentação de 9 V é adequada para controlar (com potência reduzida) um motor de passo de 12 V; no entanto pode descer até 6 V, reduzindo também neste caso Rx para 47Ω. Se as cores dos fios do motor não forem as indicadas, os dois grupos de três fios (relativos aos dois pares de bobinas) podem ser identificados com o multímetro que de momento, está sendo utilizado como ohmímetro: de fato estão isolados entre si. O fio central é fácil de encontrar: entre os outros dois tem-se a máxima resistência: não se causarão danos mutuamente se trocarem os dois trios, ou os dois fios externos de um deles, visto que apenas muda o sentido da rotação. Observe a figura 4.
Teste
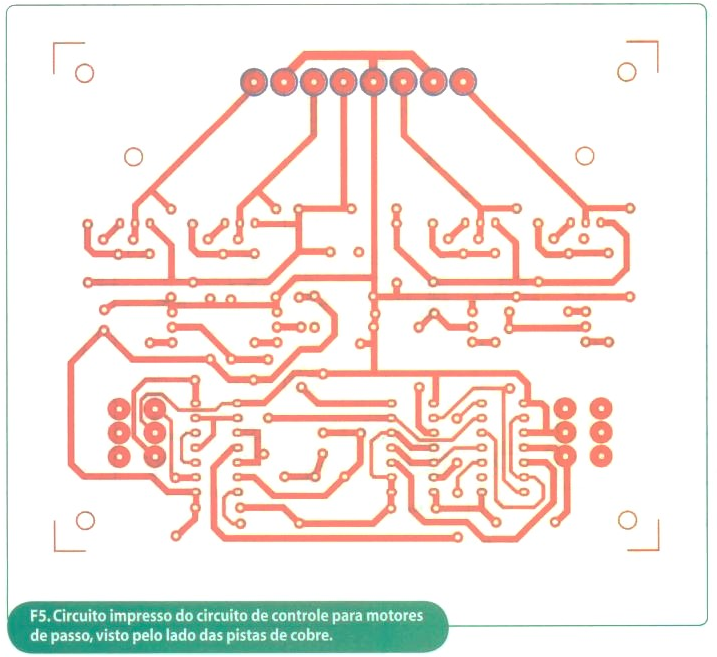
Depois de terminada a proteção dos fios e aplicada a tensão geral, é possível ligar a placa, configurando simplesmente os comandos e observando o comportamento do motor. O potenciômetro R1 regula a velocidade da rotação, variando a cadência dos pulsos; a tecla SW1 comuta entre a parada e o movimento: a tecla SW2, finalmente, determina o sentido da rotação. Para regimes especiais pode acontecer que o motor vibre e se torne mais barulhento; este fato não deve causar preocupações, uma vez que se trata de uma ressonância mecânica normal das partes móveis. Na figura 5, o circuito impresso.
Temperatura e Dissipação
Se durante o funcionamento verifica um excessivo aumento da temperatura dos transistores finais (T3, T6, T9, T12), é sinal de que o motor está absorvendo uma corrente superior ao limite da placa.
Para resolver o problema é possível reduzir a tensão de alimentação e, se necessário, aplicar um dissipador adequado sobre o T3, T6, T9 e T12, interpondo um isolador e massa termo- condutora.
O limite que em nenhum caso deve ser ultrapassado, é o de 1,5 A por fase; também deve se considerar que duas fases estão sempre ativas ao mesmo tempo, pelo que a corrente requerida ao alimentador é dupla (3 A máx.). Veja o aspecto típico na figura 6.

Controle Digital
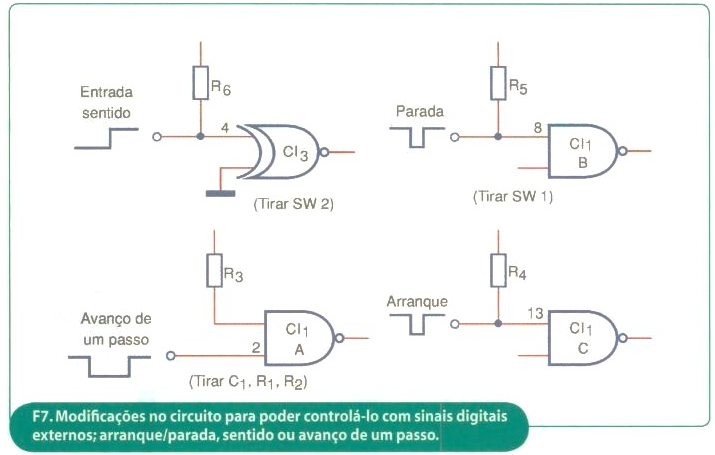
Em lugar de fazer com que o motor funcione continuamente na velocidade configurada com o potenciômetro, é possível fazê-lo avançar um passo de cada vez, controlando-o com pulsos digitais procedentes do exterior.
A figura 7 mostra como se pode modificar o circuito eliminando o C1A-S, R1 e R2, de modo que possa avançar um passo por cada pulso proporcionado; outras entradas controlam o sentido e o movimento.
Funcionamento do Circuito
A seção A do CI1, um quádruplo NAND Trigger Schmitt, forma com o C1, R1 e R2 um oscilador de onda quadrada e frequência regulável, utilizado como referência para dar cadência aos passos do motor.
As seções C e D do mesmo CI1 formam um Flip-Flop set/reset que, quando é governado pelo comutador SW1, controla o início e a parada do próprio motor, através da porta lógica Cl1b.
As duas metades do CI2 contêm outros tantos flip-flops do tipo D que, devido também ao cruzamento dos sinais realizado com os XOR do CI3, geram os sinais de controle para as quatro fases.
Estes sinais dirigem, por sua vez, os controladores de potência, cada um deles composto por três transistores (por exemplo T7, T8, T9); observe que o T9 e o T12 nunca conduzem ao mesmo tempo, igual que o T3 e T6. A sequência da alimentação das fases é 0101, 1001, 1010, 0110 quando o botão SW1 está solto (sentido dos ponteiros do relógio); ao passo que é 0101, 0110, 1010, 1001 quando a tecla está premida (sentido contrário ao dos ponteiros do relógio).
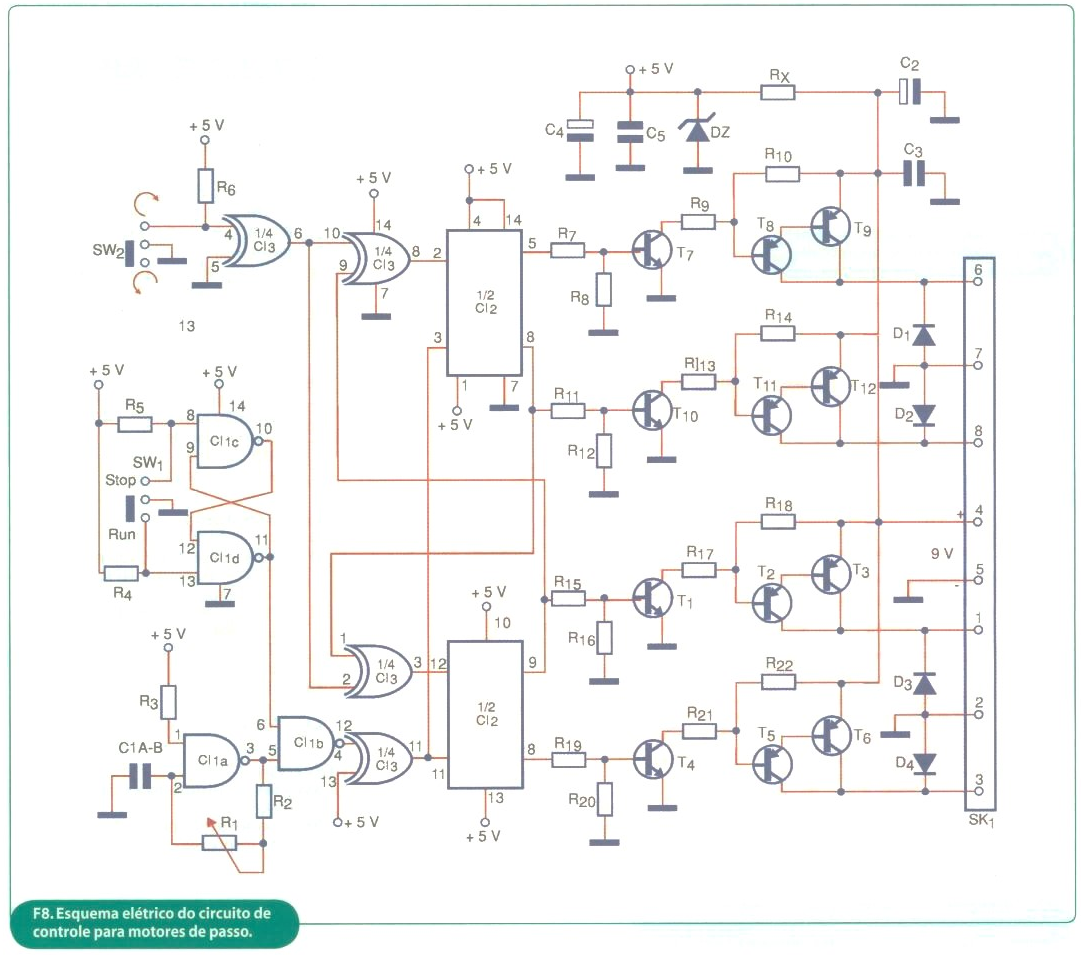
A seção de potência do circuito recebe 9 VDC diretamente dos contatos 4 e 5 da barra, enquanto a parte lógica está alimentada por 5 V devido ao diodo Zener DZ com a resistência Rx. Na figura 8 o esquema elétrico do controlador de M.P.