Em mecatrônica, e outras aplicações que envolvem também o controle de potência, entretanto, um existem casos em que o controle de velocidade de motores ou da intensidade da corrente numa carga como um solenoide ou mesmo uma lâmpada é necessário. Existem duas tecnologias básicas para se obter o controle da potência aplicada a uma carga: linear e PWM. Neste artigo vamos justamente analisar o princípio de funcionamento dos controles lineares de potência. No artigo “Controles PWM” deste site, o leitor terá explicações sobre o segundo método de controle.
Os motores de corrente contínua são dispositivos cuja potência depende da tensão que lhes é aplicada e também da intensidade da corrente que circula através deles. Quando carregamos um motor, sua velocidade diminui e com isso a intensidade da corrente aumenta, elevando-se assim a potência que ele consome conforme mostra a curva característica da figura 1.
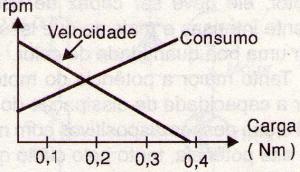
Figura 1 – Quando o motor faz mais força, a corrente aumenta (consumo) e a velocidade diminui.
Por outro lado, sob carga constante, a potência consumida aumenta com a tensão de um modo mais ou menos linear, juntamente com a corrente e a sua velocidade de rotação, conforme mostra o gráfico da figura 2.
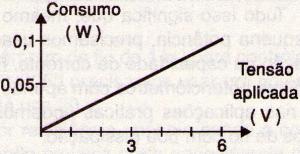
Figura 2 – Consumo e tensão são proporcionais, conforme mostra a curva desta figura.
Isso significa que a maneira mais simples de se controlar a velocidade de um motor de corrente contínua é modificando a corrente que passa através dele, o que pode ser feito com a ajuda de algum tipo de dispositivo externo. Este tipo de controle em que variamos linearmente a corrente aplicada numa carga ou a tensão aplicada é denominado "controle linear" de potência. Existem diversas técnicas para se obter esse controle, utilizando-se desde simples componentes, até configurações baseadas em modernos semicondutores.
O Reostato
A forma mais simples de se controlar a intensidade de uma corrente num motor de corrente contínua é obtida através de um reostato, conforme mostra a figura 3.
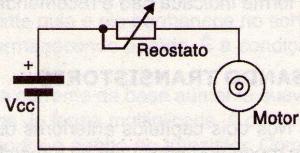
Figura 3 – Controle linear simples utilizando um reostato.
Um reostato nada mais é do que um resistor variável ou ajustável ligado em série com o motor. Quando o reostato está na sua posição de mínima resistência ou zero, passa livremente e sua intensidade através do motor é máxima. Quando aumentamos a resistência do reostato, ele forma com o motor um divisor de tensão. Quando sua resistência aumenta, diminui a tensão aplicada ao motor é menor e com isso também a corrente. Com a diminuição da corrente no motor, diminui velocidade, conforme mostra a figura 4.
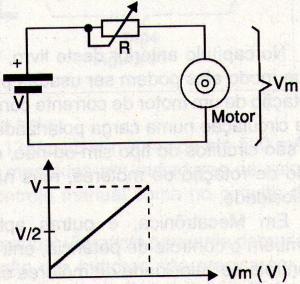
Figura 4 – O reostato no controle de um motor e sua curva de atuação.
Os reostatos, entretanto, tem uma séria limitação de uso: como a corrente que passa através dele é a corrente do motor, eles devem ser capazes de controlar correntes relativamente intensas e mais do que isso: devem ser capazes de dissipar uma boa quantidade de calor.
Tanto maior a potência do motor controlado, maior deve ser a capacidade de dissipação do reostato. Isso torna inviável o uso desses dispositivos com motores (ou outras cargas) de alta potência, tanto pelo custo como pelo tamanho. Assim, conforme mostra a figura 5, na condição em que o reostato está na posição em que a tensão aplicada ao motor é metade da tensão de alimentação, ele dissipa tanta potência quanto o próprio motor!
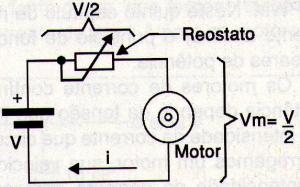
Figura 5 – A tensão se divide entre o reostato e o motor, o que é causa de grandes perdas em forma de calor.
Tudo isso significa que, mesmo controlando motores de pequena potência, precisamos usar reostatos de boa dissipação ou capacidade de corrente. Reostatos nada mais são do que potenciômetros com apenas dois terminais usados e nas aplicações práticas podemos usar potenciômetros de fio com boa dissipação. Assim, na figura 6 mostramos como é possível usar um potenciômetro de fio de 50 ohms x 5 W para controlar um pequeno motor de corrente contínua que não exija mais do que uns 100 mA.
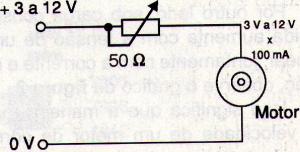
Figura 6 – Circuito prático para um motor de baixo consumo.
Para potências maiores, o uso do reostato da forma indicada não é recomendável.
Usando Transistores
Sabemos que podemos usar os transistores como chaves e com isso controlar correntes intensas a partir de sinais fracos. A primeira aplicação importante do transistor como chave pode ser vista quando analisamos as pontes H. No entanto, os transistores também podem funcionar de uma outra forma, amplificando a corrente, ou seja, controlando sua intensidade através de uma carga que é justamente algo que nos interessa neste instante. Ao analisar o princípio de funcionamento de um transistor, vemos que ele pode operar de uma forma linear, amplificando correntes, ou seja, funcionando como um resistor variável. Lembrando através da figura 7, a curva característica de um transistor tem duas regiões importantes: uma em que ele opera como chave e outra que ele opera como amplificador, ou seja, no modo linear.
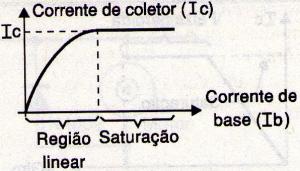
Figura 7 – Curva característica de um transistor ressaltando a região de operação linear.
Se trabalharmos com um transistor no setor linear de sua curva característica podemos controlar com precisão a corrente que passa através dele e de uma carga ligada em série, tudo isso a partir de uma corrente muito menor que aplicamos à sua base, conforme mostra a figura 8.
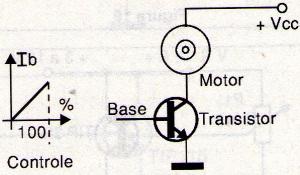
Figura 8 – Usando um transistor para controlar a corrente num motor.
Como um transistor de potência pode controlar correntes intensas, podemos usar uma corrente muito menor para controlar correntes maiores. Essa corrente de controle pode ser suficientemente baixa para que um potenciômetro comum suporte sem problemas. Levando isso à prática podemos ter um controle de velocidade para um motor de corrente contínua ou outra carga qualquer com facilidade, usando um potenciômetro de baixa potência e um transistor para fazer o “trabalho pesado”. Chegamos então a um primeiro tipo de controle linear de potência que é mostrado na figura 9. Esse circuito faz uso de um transistor NPN de potência que pode ser o BD135 para cargas de até 500 mA, o TIP31 para cargas de até uns 2 A e o 2N3055 para cargas de até 4 ampères.
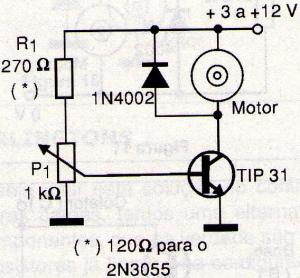
Figura 9 – Circuito completo de um controle de motor para correntes até uns 4 A.
Para os transistores BD135 e TIP31 podemos usar um potenciômetro de fio de 1 k ohms para controlar a velocidade de um motor com tensões de até uns 12 V. Para o 2N3055 precisamos usar um potenciômetro de fio de 470 ohms para controlar cargas com tensões de até uns 20 V. Usamos potenciômetros de fio, pois em condições de menor resistência, mesmo sendo a corrente de base menos intensa do que a exigida pelo motor ela ainda provoca certo aquecimento do componente. Um potenciômetro de carbono (grafite) poderia aquecer demais num circuito como o indicado. Veja que em todos os casos, os transistores deverão estar montados em bons radiadores de calor.
O funcionamento deste controle é simples de entender: quando o cursor do potenciômetro está do lado do emissor do transistor, a corrente em sua base é praticamente nula e ele permanece no corte, ou seja, não conduz a corrente. O motor não recebe corrente permanecendo parado. É a condição de potência mínima do controle.
À medida que deslocamos o cursor em direção ao resistor R1, a corrente de base aumenta suavemente e com isso aumenta a corrente no coletor do transistor, mas de forma multiplicada. A corrente de coletor será tantas vezes maior que a corrente de base quanto for o ganho do transistor. Com o aumento da corrente, o motor acelera até atingir sua potência máxima. Este aumento de corrente segue até o ponto em que ocorre a saturação do transistor conforme mostra o gráfico da figura 10.
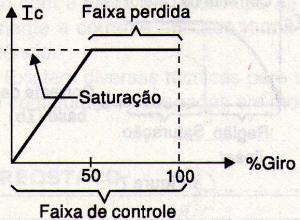
Figura 10- Curva mostrando a faixa perdida quando ocorre a saturação do transistor.
Na situação ideal, o resistor R1 deve ser calculado para que esta saturação ocorra no extremo (máximo) do movimento do cursor do potenciômetro, mas na prática nem sempre isso é possível, pois os transistores variam muito de ganho mesmo entre os do mesmo tipo (com a mesma numeração). Assim, o melhor num projeto deste, é que depois de montado o próprio leitor verifique o ponto em que ocorre a saturação. Se for antes do máximo do giro do potenciômetro aumente R1 e se não ocorrer mesmo quando ele chegar ao fim, diminua R1.
Este mesmo circuito pode ser elaborado com transistores PNP adquirindo então a configuração mostrada na figura 11.
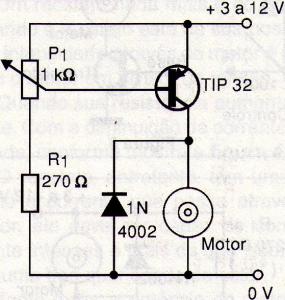
Figura 11 – Circuito equivalente utilizando transistor PNP.
O transistor pode ser o BD136 para 500 mA, TIP32 para 2 A e TIP2955 para 4 ampères. Valem as mesmas considerações que fizemos para os circuitos com transistores NPN.