Circuitos Darlington
Para podermos controlar as correntes elevadas de motores e outras cargas a partir de correntes ainda menores, podemos associar diversos transistores e a configuração mais comum é a denominada Darlington.
Na figura 12 temos o modo de conectarmos dois transistores NPN de modo a obtermos uma etapa amplificadora Darlington.
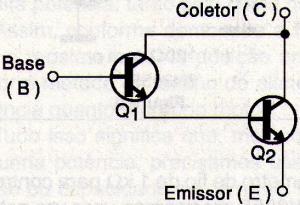
Figura 12 – Circuito com dois transistores com acoplamento Darlington.
Este circuito se comporta como um único transistor cujo ganho seja o produto dos ganhos dos transistores usados. Por exemplo, se Q1 possuir ganho 200 e Q2 tiver ganho 50, o ganho do circuito será 50 x 200 = 000, ou seja, ele se comportará como um único transistor de ganho 10 000. Assim, para termos um controle linear de potência usando um circuito como este,basta agregarmos o dispositivo de controle, que pode ser um potenciômetro de valor bastante alto, conforme mostra a figura 13.
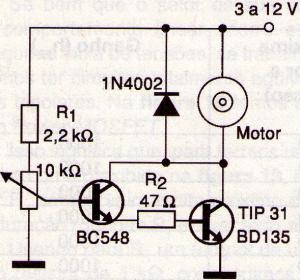
Figura 13 – Controle linear com par de transistor na configuração Darlington.
Um potenciômetro de 10 000 ohms, como o usado no circuito da figura 13 deixa passar uma corrente de apenas 1 mA quando alimentado com 10 V. Com esta corrente, e com os transistores proporcionando um ganho de pelo menos 1 000 vezes podemos controlar uma carga de até 5 ampères (1 000 x 0,001 = 1 A). Veja que nestas condições não precisamos mais de um potenciômetro de fio no controle. Um potenciômetro comum de baixa dissipação (carbono) serve perfeitamente. Para o circuito mostrado, com transistores BC548 e TIP31 podemos controlar cargas de até uns 2 ampères, sem problemas. Transistores como o TIP41 em lugar do tip 31 podem controlar correntes ainda maiores. A mesma configuração pode ser elaborada com transistores PNP, conforme mostra a figura 14.
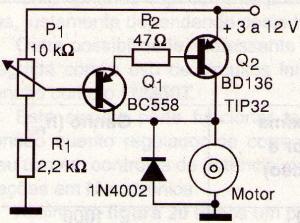
Figura 14 – Circuito Darlington com transistores PNP.
Transistores Darlingtons
Para o leitor que deseja usar esta solução no controle linear de motores e outras cargas existe uma alternativa interessante. Existem componentes, que na verdade são formados por pares de transistores já ligados na configuração Darlington, disponíveis num invólucro único.
Estes componentes são chamados "transistores Darlington" e tem tipicamente o circuito equivalente e aparência mostrados na figura 15.

Figura 15 – Circuito equivalente, símbolo e aspecto de um transistor Darlington NPN.
A Texas Instruments fabrica uma série importante de transistores Darlington de boa potência, que são ideais não só para controles lineares de potência como para outras aplicações, inclusive as pontes H que estudamos no artigo anterior desta série. Na figura 16 mostramos então controles lineares de potência com transistores TIP da Texas que tanto podem ser NPN como PNP.
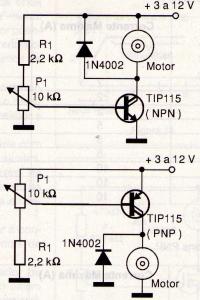
Figura 16 – Controles lineares com transistores Darlington NPN e PNP.
As tabelas abaixo dão as características dos transistores que podem ser usados nestes circuitos:
Darlingtons NPN
| Tipo | Corrente Máxima (A) | Tensão máxima entre coletor e emissor (Vceo) - (V) | Ganho (hFE) |
| TIP110 | 2 | 60 | 1000 |
| TIP111 | 2 | 80 | 1000 |
| TIP112 | 2 | 100 | 1000 |
| TIP120 | 5 | 60 | 1000 |
| TIP121 | 5 | 80 | 1000 |
| TIP122 | 5 | 100 | 1000 |
| TIP140 | 10 | 60 | 1000 |
| TIP141 | 10 | 80 | 1000 |
| TIP142 | 10 | 100 | 1000 |
Darlingtons PNP
| Tipo | Corrente Máxima (A) | Tensão máxima entre coletor e emissor (Vceo) - (V) | Ganho (hFE) |
| TIP115 | 2 | 60 | 1000 |
| TIP116 | 2 | 80 | 1000 |
| TIP117 | 2 | 100 | 1000 |
| TIP125 | 5 | 60 | 1000 |
| TIP126 | 5 | 80 | 1000 |
| TIP127 | 5 | 100 | 1000 |
| TIP145 | 10 | 60 | 1000 |
| TIP146 | 10 | 80 | 1000 |
| TIP147 | 10 | 100 | 1000 |
Outras configurações
Os transistores comuns bipolares podem ser usados em outras configurações para o controle linear de potência, como por exemplo a velocidade de motores de corrente contínua. Uma possibilidade de uso de transistores complementares (um PNP e um NPN) é mostrada na figura 17.
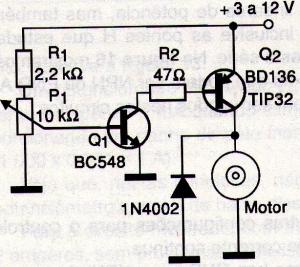
Figura 17 – Configuração com transistores complementares.
Nesta configuração o transistor NPN (que pode ser um BC548) controla a corrente de base de um PNP de potência (um TIP32, por exemplo). O ganho desta etapa é aproximadamente o produto dos ganhos dos transistores usados.
Outros Componentes
Não são apenas transistores bipolares que podem ser usados no controle linear de potência, com a configuração básica que analisamos neste artigo. Outros componentes que possuem características lineares de operação em algum ponto de sua curva de comportamento elétrico também podem ser aproveitados. Um primeiro deles é o MOSFET de Potência ou Transistor de Efeito de Campo de Potência. Se bem que o setor da sua curva característica em que o comportamento linear ocorra esteja "espremido" numa pequena faixa de tensões, se trabalharmos neste setor podemos ter circuitos totalmente equivalentes ao dos transistores bipolares. Na figura 18 temos a curva característica de um Power MOSFET.
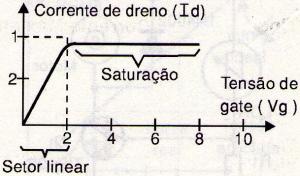
Figura 18 – Curva característica de um MOSFET de potência.
Isso significa que, para termos um controle linear num circuito como o mostrado na figura 19, é preciso colocar o resistor R1 num valor muito próximo ao que leva o transistor à saturação quando P1 estiver todo aberto.
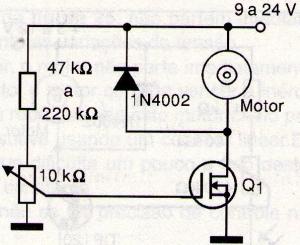
Figura 19 – Controle linear de velocidade utilizando um MOPSFET de potência.
Usando para R1 um trimpot de uns 100 k ohms em série com um resistor de 1 k ohms conseguimos isso através de ajustes. Neste circuito, qualquer transistor de efeito de campo de potência pode ser usado para controles motores de corrente contínua cuja corrente pode chegar a vários ampères, justamente dependendo deste transistor.
Outra possibilidade interessante de controle linear de modo é conseguida com o uso de circuitos integrados reguladores de tensão como o LM350T. Este circuito pode funcionar tanto como regulador de tensão como regulador de corrente possibilitando assim seu uso em controles de potência muito interessantes para aplicações em mecatrônica. Assim, na figura 20 temos um primeiro circuito em que o LM350T é usado para controlar a velocidade de um motor ou a corrente numa carga através da tensão aplicada.
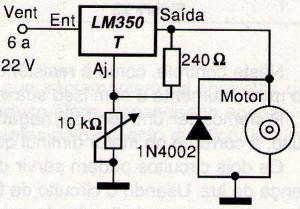
Figura 20 – Controle linear utilizando o circuito integrado LM350T.
A tensão na carga vai variar entre 1,2 V (que é a tensão mínima que o LM350T fornece em sua saída, devido ao zener interno) até uns 2 V a menos que a tensão de entrada. A corrente máxima que este circuito pode fornecer é de 3 ampères. Uma outra aplicação é como controle de corrente constante, o que nos possibilita manter o torque constante de um motor mesmo quando ele é carregado. O que esse circuito faz é aumentar automaticamente a tensão aplicada no motor quando ele é carregado e sua corrente tende a aumentar exigindo assim mais potência. Com isso, a corrente se mantém juntamente com torque.
Na figura 21 mostramos como isso pode ser feito usando o LM350T.
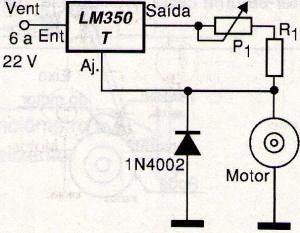
Figura 21 – Controle de corrente constante com um regulador linear de tensão.
A corrente que vai circular no motor pode ser ajustada por P1 numa faixa que terá o valor máximo dependente de R1. A fórmula para calcular R1 é:
R1 = 1,25/I
Onde: R1 é dado em ohms
I é a corrente máxima em ampères no motor
A corrente mínima depende do valor de P1 e será dada por:
I = 1,25/(R1+P1)
Por exemplo, para um motor de 1 ampère, usamos R1 = 1,25 ohms.
Usando um potenciômetro de fio de 100 ohms a corrente mínima no motor (posição de máxima resistência) será de :
I = 1,25/(1,25 + 100)
I = 1,25/101,25
I = 0,00123 A = 1,23 mA
Outros reguladores de tensão de três terminais como o LM117 podem ser usados da mesma forma. Valem as mesma fórmulas para os cálculos. Apenas observamos que o LM117 tem uma corrente máxima de saída de 1,5 A.